 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning with Weak Annotations for Robust Maritime Obstacle Detection
Paper and Code
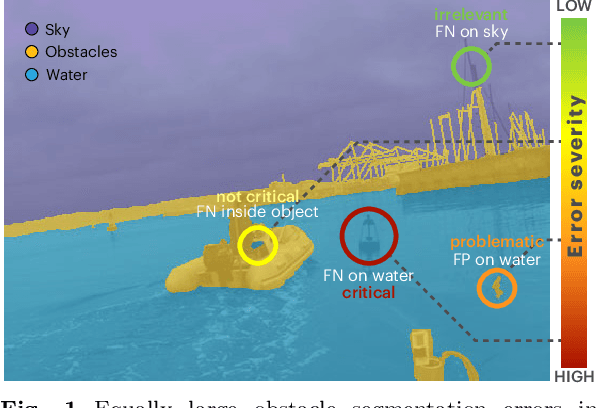
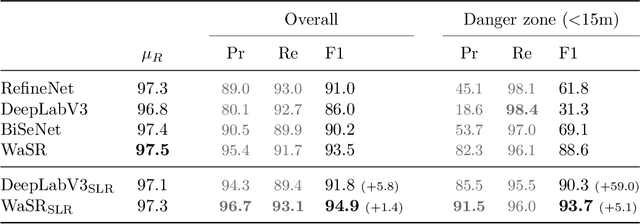
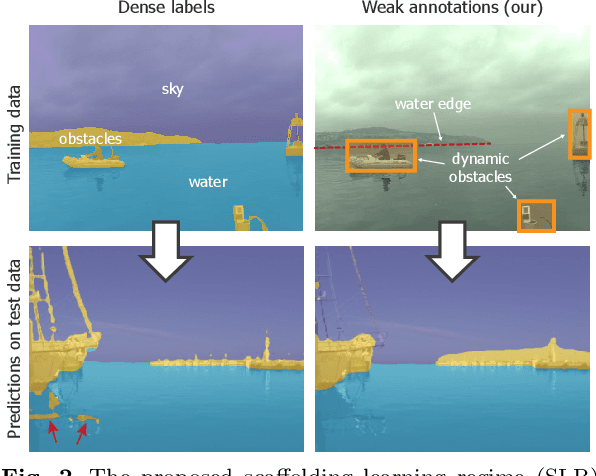
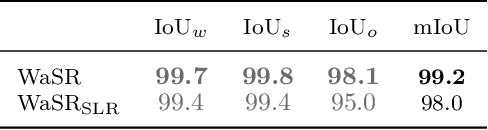
Robust maritime obstacle detection is crucial for safe navigation of autonomous boats and timely collision avoidance. The current state-of-the-art is based on deep segmentation networks trained on large datasets. Per-pixel ground truth labeling of such datasets, however, is labor-intensive and expensive. We propose a new scaffolding learning regime (SLR), that leverages weak annotations consisting of water edge, horizon and obstacle bounding boxes to train segmentation-based obstacle detection networks, and thus reduces the required ground truth labelling effort by twenty-fold. SLR trains an initial model from weak annotations, then alternates between re-estimating the segmentation pseudo labels and improving the network parameters. Experiments show that maritime obstacle segmentation networks trained using SLR on weak labels not only match, but outperform the same networks trained with dense ground truth labels, which is a remarkable result. In addition to increased accuracy, SLR also increases domain generalization and can be used for domain adaptation with a low manual annotation load. The code and pre-trained models are available at https://github.com/lojzezust/SLR .