 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal Context for Robust Maritime Obstacle Detection
Paper and Code
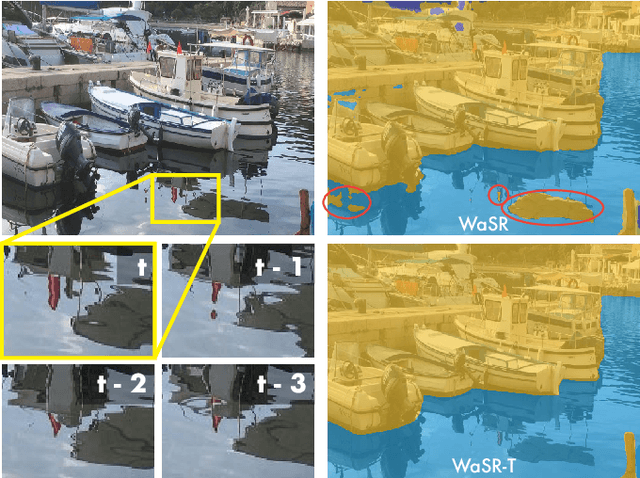
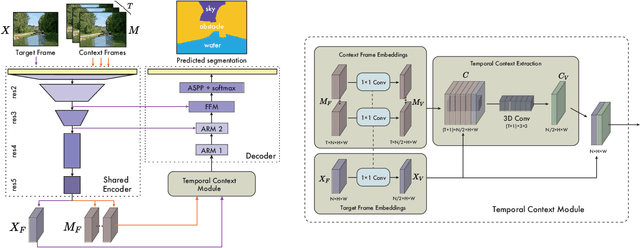
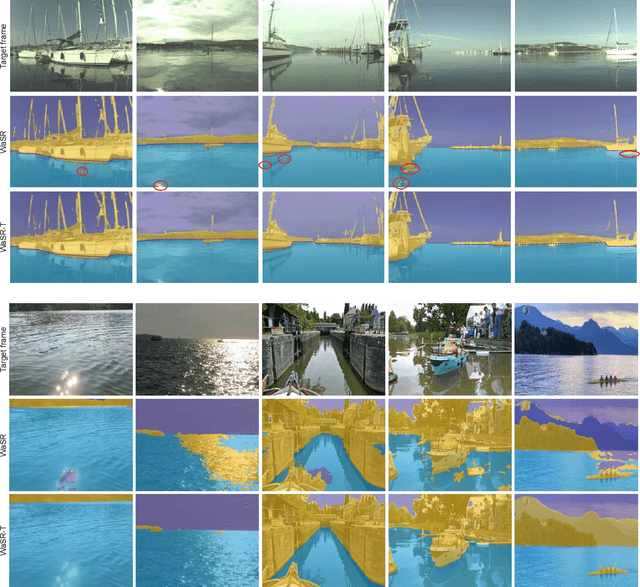
Robust maritime obstacle detection is essential for fully autonomous unmanned surface vehicles (USVs). The currently widely adopted segmentation-based obstacle detection methods are prone to misclassification of object reflections and sun glitter as obstacles, producing many false positive detections, effectively rendering the methods impractical for USV navigation. However, water-turbulence-induced temporal appearance changes on object reflections are very distinctive from the appearance dynamics of true objects. We harness this property to design WaSR-T, a novel maritime obstacle detection network, that extracts the temporal context from a sequence of recent frames to reduce ambiguity. By learning the local temporal characteristics of object reflection on the water surface, WaSR-T substantially improves obstacle detection accuracy in the presence of reflections and glitter. Compared with existing single-frame methods, WaSR-T reduces the number of false positive detections by 41% overall and by over 53% within the danger zone of the boat, while preserving a high recall, and achieving new state-of-the-art performance on the challenging MODS maritime obstacle detection benchmark.