 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Indoor Localization Accuracy by Using an Efficient Implicit Neural Map Representation
Mar 30, 2025Globally localizing a mobile robot in a known map is often a foundation for enabling robots to navigate and operate autonomously. In indoor environments, traditional Monte Carlo localization based on occupancy grid maps is considered the gold standard, but its accuracy is limited by the representation capabilities of the occupancy grid map. In this paper, we address the problem of building an effective map representation that allows to accurately perform probabilistic global localization. To this end, we propose an implicit neural map representation that is able to capture positional and directional geometric features from 2D LiDAR scans to efficiently represent the environment and learn a neural network that is able to predict both, the non-projective signed distance and a direction-aware projective distance for an arbitrary point in the mapped environment. This combination of neural map representation with a light-weight neural network allows us to design an efficient observation model within a conventional Monte Carlo localization framework for pose estimation of a robot in real time. We evaluated our approach to indoor localization on a publicly available dataset for global localization and the experimental results indicate that our approach is able to more accurately localize a mobile robot than other localization approaches employing occupancy or existing neural map representations. In contrast to other approaches employing an implicit neural map representation for 2D LiDAR localization, our approach allows to perform real-time pose tracking after convergence and near real-time global localization. The code of our approach is available at: https://github.com/PRBonn/enm-mcl.
PINGS: Gaussian Splatting Meets Distance Fields within a Point-Based Implicit Neural Map
Feb 09, 2025Robots require high-fidelity reconstructions of their environment for effective operation. Such scene representations should be both, geometrically accurate and photorealistic to support downstream tasks. While this can be achieved by building distance fields from range sensors and radiance fields from cameras, the scalable incremental mapping of both fields consistently and at the same time with high quality remains challenging. In this paper, we propose a novel map representation that unifies a continuous signed distance field and a Gaussian splatting radiance field within an elastic and compact point-based implicit neural map. By enforcing geometric consistency between these fields, we achieve mutual improvements by exploiting both modalities. We devise a LiDAR-visual SLAM system called PINGS using the proposed map representation and evaluate it on several challenging large-scale datasets. Experimental results demonstrate that PINGS can incrementally build globally consistent distance and radiance fields encoded with a compact set of neural points. Compared to the state-of-the-art methods, PINGS achieves superior photometric and geometric rendering at novel views by leveraging the constraints from the distance field. Furthermore, by utilizing dense photometric cues and multi-view consistency from the radiance field, PINGS produces more accurate distance fields, leading to improved odometry estimation and mesh reconstruction.
ActiveGS: Active Scene Reconstruction using Gaussian Splatting
Dec 23, 2024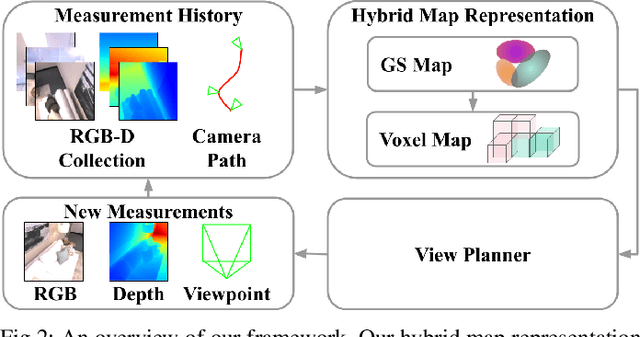
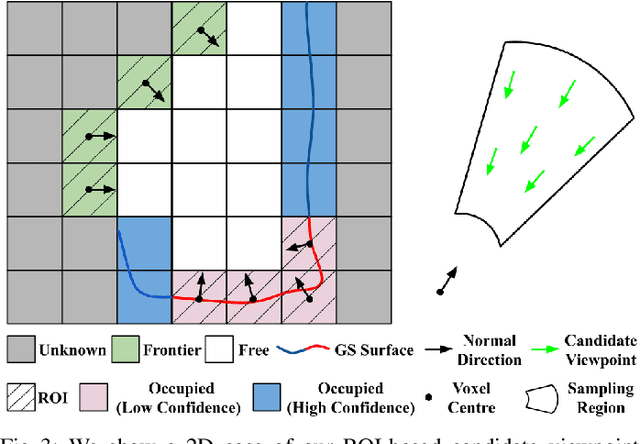
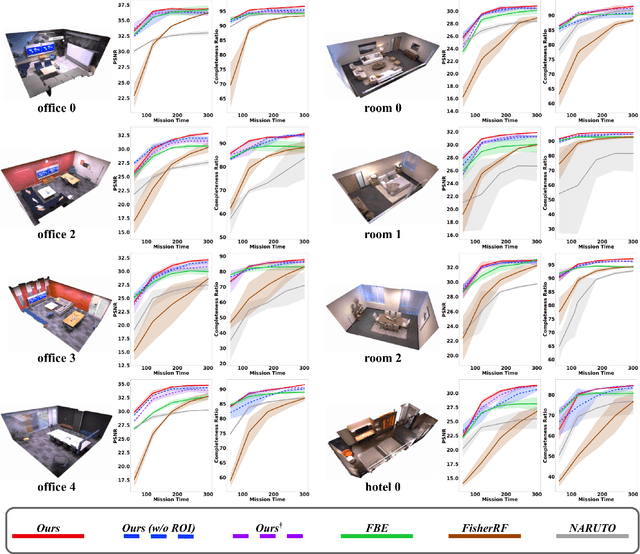
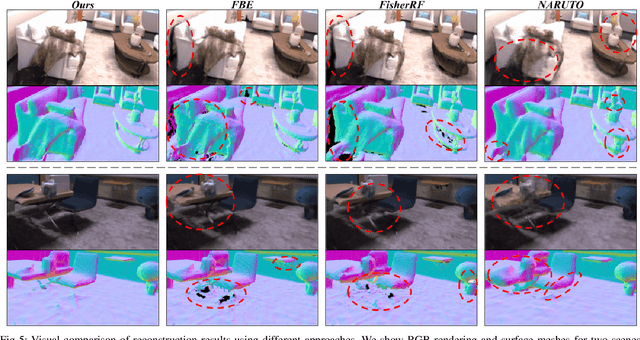
Robotics applications often rely on scene reconstructions to enable downstream tasks. In this work, we tackle the challenge of actively building an accurate map of an unknown scene using an on-board RGB-D camera. We propose a hybrid map representation that combines a Gaussian splatting map with a coarse voxel map, leveraging the strengths of both representations: the high-fidelity scene reconstruction capabilities of Gaussian splatting and the spatial modelling strengths of the voxel map. The core of our framework is an effective confidence modelling technique for the Gaussian splatting map to identify under-reconstructed areas, while utilising spatial information from the voxel map to target unexplored areas and assist in collision-free path planning. By actively collecting scene information in under-reconstructed and unexplored areas for map updates, our approach achieves superior Gaussian splatting reconstruction results compared to state-of-the-art approaches. Additionally, we demonstrate the applicability of our active scene reconstruction framework in the real world using an unmanned aerial vehicle.
3D LiDAR Mapping in Dynamic Environments Using a 4D Implicit Neural Representation
May 06, 2024Building accurate maps is a key building block to enable reliable localization, planning, and navigation of autonomous vehicles. We propose a novel approach for building accurate maps of dynamic environments utilizing a sequence of LiDAR scans. To this end, we propose encoding the 4D scene into a novel spatio-temporal implicit neural map representation by fitting a time-dependent truncated signed distance function to each point. Using our representation, we extract the static map by filtering the dynamic parts. Our neural representation is based on sparse feature grids, a globally shared decoder, and time-dependent basis functions, which we jointly optimize in an unsupervised fashion. To learn this representation from a sequence of LiDAR scans, we design a simple yet efficient loss function to supervise the map optimization in a piecewise way. We evaluate our approach on various scenes containing moving objects in terms of the reconstruction quality of static maps and the segmentation of dynamic point clouds. The experimental results demonstrate that our method is capable of removing the dynamic part of the input point clouds while reconstructing accurate and complete 3D maps, outperforming several state-of-the-art methods. Codes are available at: https://github.com/PRBonn/4dNDF
PIN-SLAM: LiDAR SLAM Using a Point-Based Implicit Neural Representation for Achieving Global Map Consistency
Jan 17, 2024Accurate and robust localization and mapping are essential components for most autonomous robots. In this paper, we propose a SLAM system for building globally consistent maps, called PIN-SLAM, that is based on an elastic and compact point-based implicit neural map representation. Taking range measurements as input, our approach alternates between incremental learning of the local implicit signed distance field and the pose estimation given the current local map using a correspondence-free, point-to-implicit model registration. Our implicit map is based on sparse optimizable neural points, which are inherently elastic and deformable with the global pose adjustment when closing a loop. Loops are also detected using the neural point features. Extensive experiments validate that PIN-SLAM is robust to various environments and versatile to different range sensors such as LiDAR and RGB-D cameras. PIN-SLAM achieves pose estimation accuracy better or on par with the state-of-the-art LiDAR odometry or SLAM systems and outperforms the recent neural implicit SLAM approaches while maintaining a more consistent, and highly compact implicit map that can be reconstructed as accurate and complete meshes. Finally, thanks to the voxel hashing for efficient neural points indexing and the fast implicit map-based registration without closest point association, PIN-SLAM can run at the sensor frame rate on a moderate GPU. Codes will be available at: https://github.com/PRBonn/PIN_SLAM.
SHINE-Mapping: Large-Scale 3D Mapping Using Sparse Hierarchical Implicit Neural Representations
Oct 05, 2022
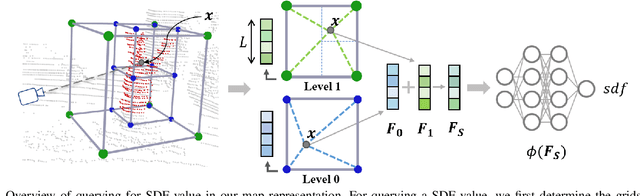
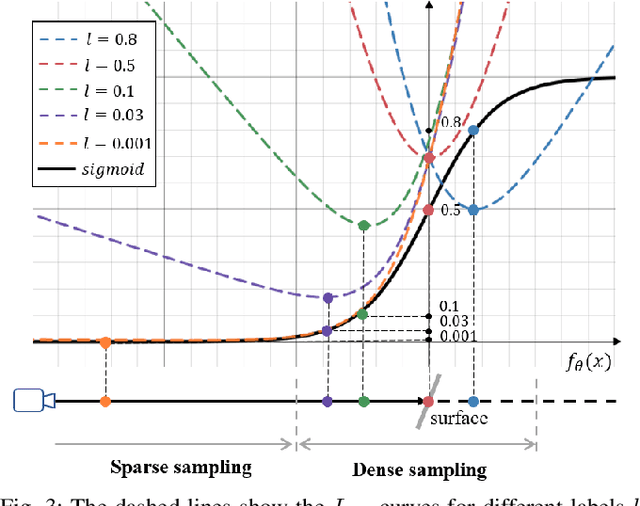
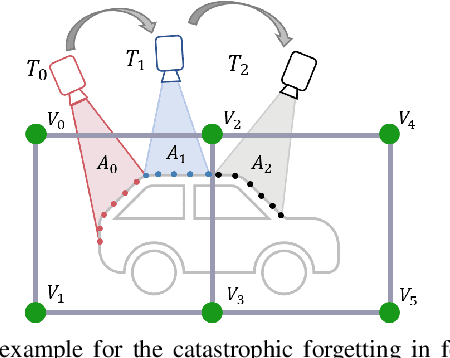
Accurate mapping of large-scale environments is an essential building block of most outdoor autonomous systems. Challenges of traditional mapping methods include the balance between memory consumption and mapping accuracy. This paper addresses the problems of achieving large-scale 3D reconstructions with implicit representations using 3D LiDAR measurements. We learn and store implicit features through an octree-based hierarchical structure, which is sparse and extensible. The features can be turned into signed distance values through a shallow neural network. We leverage binary cross entropy loss to optimize the local features with the 3D measurements as supervision. Based on our implicit representation, we design an incremental mapping system with regularization to tackle the issue of catastrophic forgetting in continual learning. Our experiments show that our 3D reconstructions are more accurate, complete, and memory-efficient than current state-of-the-art 3D mapping methods.
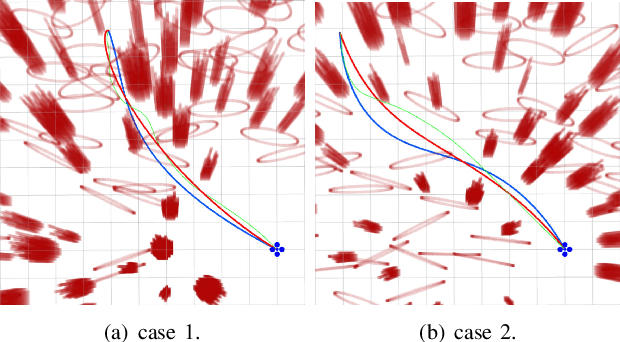
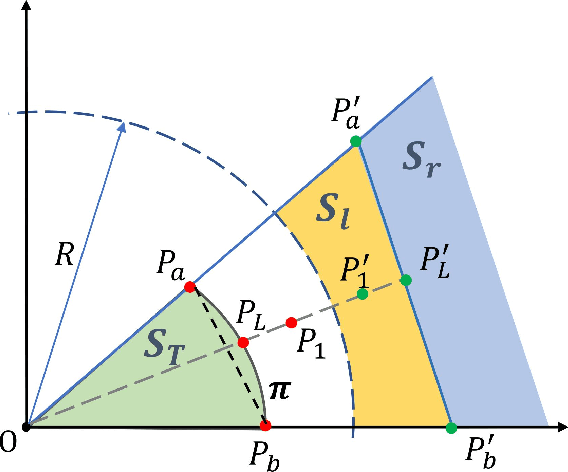
Star-Convex Constrained Optimization for Visibility Planning with Application to Aerial Inspection
Apr 09, 2022
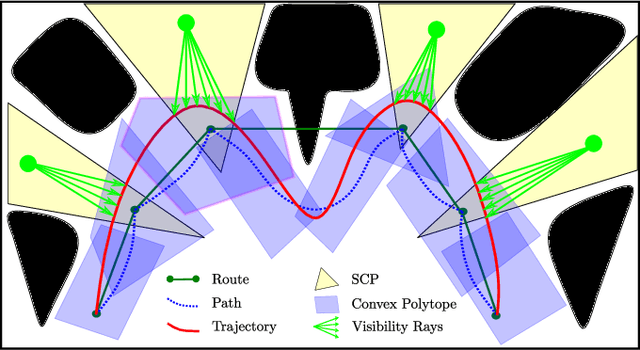
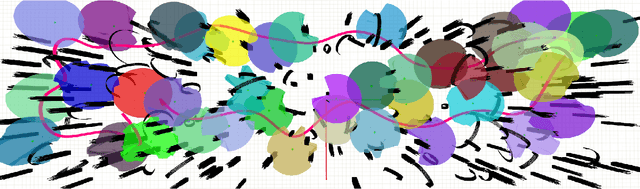
The visible capability is critical in many robot applications, such as inspection and surveillance, etc. Without the assurance of the visibility to targets, some tasks end up not being complete or even failing. In this paper, we propose a visibility guaranteed planner by star-convex constrained optimization. The visible space is modeled as star convex polytope (SCP) by nature and is generated by finding the visible points directly on point cloud. By exploiting the properties of the SCP, the visibility constraint is formulated for trajectory optimization. The trajectory is confined in the safe and visible flight corridor which consists of convex polytopes and SCPs. We further make a relaxation to the visibility constraints and transform the constrained trajectory optimization problem into an unconstrained one that can be reliably and efficiently solved. To validate the capability of the proposed planner, we present the practical application in site inspection. The experimental results show that the method is efficient, scalable, and visibility guaranteed, presenting the prospect of application to various other applications in the future.
Meeting-Merging-Mission: A Multi-robot Coordinate Framework for Large-Scale Communication-Limited Exploration
Sep 16, 2021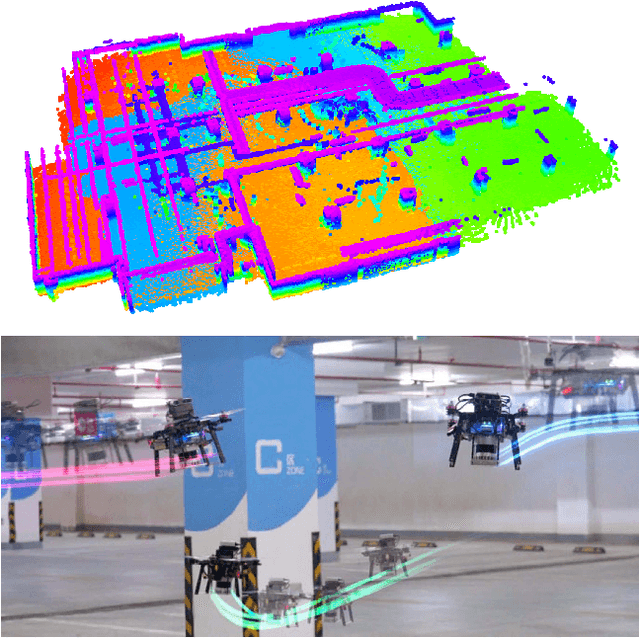
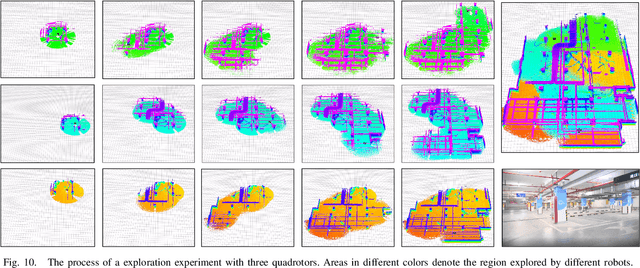
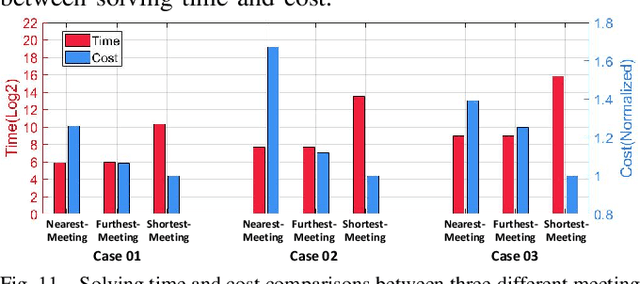
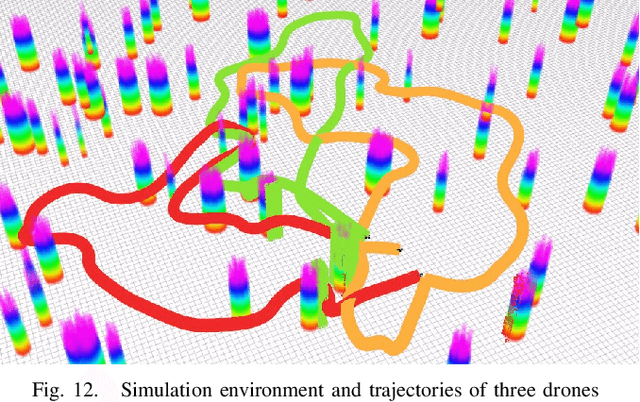
This letter presents a complete framework Meeting-Merging-Mission for multi-robot exploration under communication restriction. Considering communication is limited in both bandwidth and range in the real world, we propose a lightweight environment presentation method and an efficient cooperative exploration strategy. For lower bandwidth, each robot utilizes specific polytopes to maintains free space and super frontier information (SFI) as the source for exploration decision-making. To reduce repeated exploration, we develop a mission-based protocol that drives robots to share collected information in stable rendezvous. We also design a complete path planning scheme for both centralized and decentralized cases. To validate that our framework is practical and generic, we present an extensive benchmark and deploy our system into multi-UGV and multi-UAV platforms.
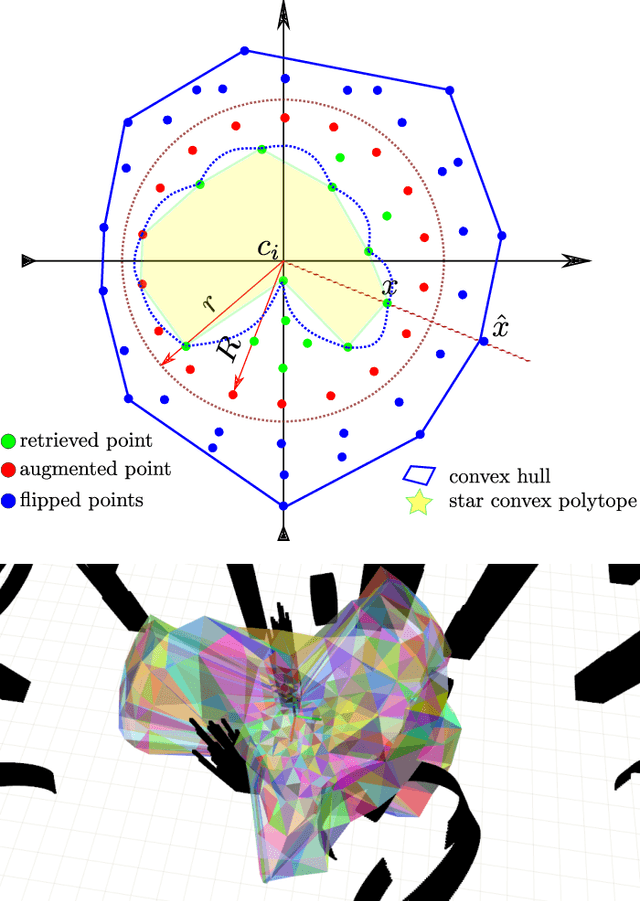
Generating Large Convex Polytopes Directly on Point Clouds
Oct 17, 2020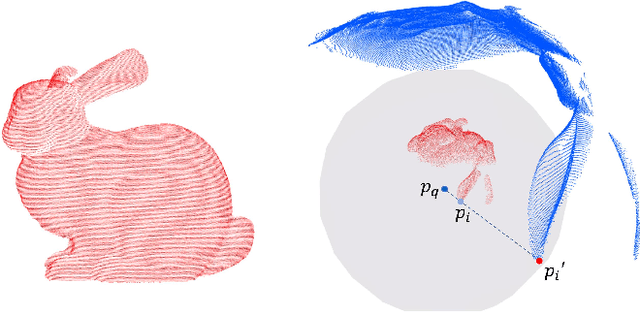

In this paper, we present a method to efficiently generate large, free, and guaranteed convex space among arbitrarily cluttered obstacles. Our method operates directly on point clouds, avoids expensive calculations, and processes thousands of points within a few milliseconds, which extremely suits embedded platforms. The base stone of our method is sphere flipping, a one-one invertible nonlinear transformation, which maps a set of unordered points to a nonlinear space. With these wrapped points, we obtain a collision-free star convex polytope. Then, utilizing the star convexity, we efficiently modify the polytope to convex and guarantee its free of obstacles. Extensive quantitative evaluations show that our method significantly outperforms state-of-the-art works in efficiency. We also present practical applications with our method in 3D, including large-scale deformable topological mapping and quadrotor optimal trajectory planning, to validate its capability and efficiency. The source code of our method will be released for the reference of the community.