 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Large Convex Polytopes Directly on Point Clouds
Paper and Code
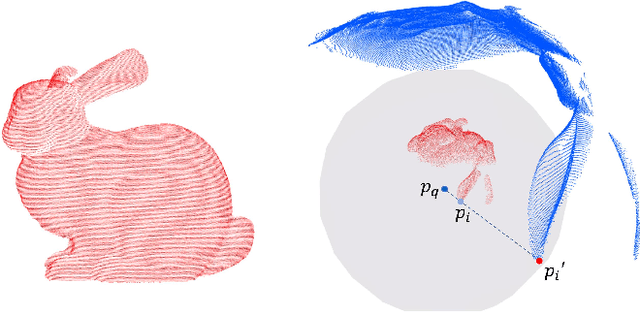

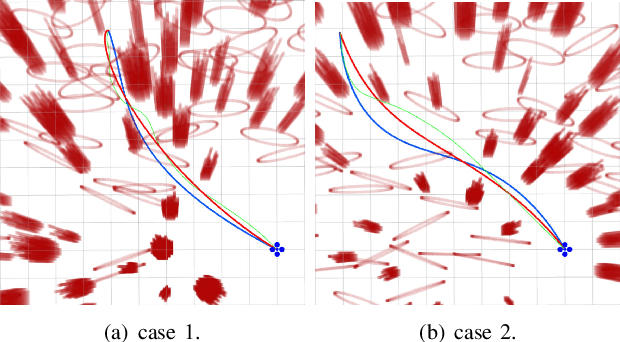
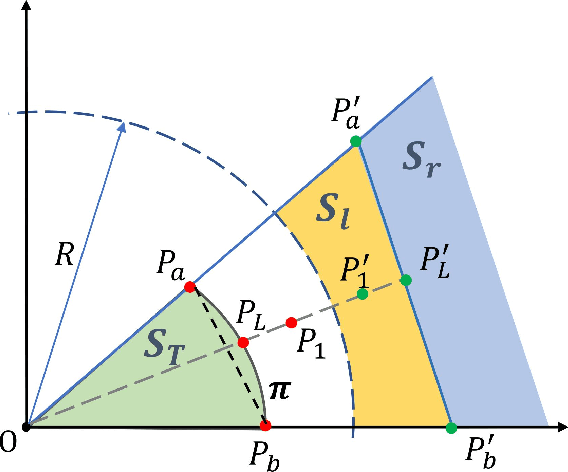
In this paper, we present a method to efficiently generate large, free, and guaranteed convex space among arbitrarily cluttered obstacles. Our method operates directly on point clouds, avoids expensive calculations, and processes thousands of points within a few milliseconds, which extremely suits embedded platforms. The base stone of our method is sphere flipping, a one-one invertible nonlinear transformation, which maps a set of unordered points to a nonlinear space. With these wrapped points, we obtain a collision-free star convex polytope. Then, utilizing the star convexity, we efficiently modify the polytope to convex and guarantee its free of obstacles. Extensive quantitative evaluations show that our method significantly outperforms state-of-the-art works in efficiency. We also present practical applications with our method in 3D, including large-scale deformable topological mapping and quadrotor optimal trajectory planning, to validate its capability and efficiency. The source code of our method will be released for the reference of the community.