 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Indoor Localization Accuracy by Using an Efficient Implicit Neural Map Representation
Mar 30, 2025Globally localizing a mobile robot in a known map is often a foundation for enabling robots to navigate and operate autonomously. In indoor environments, traditional Monte Carlo localization based on occupancy grid maps is considered the gold standard, but its accuracy is limited by the representation capabilities of the occupancy grid map. In this paper, we address the problem of building an effective map representation that allows to accurately perform probabilistic global localization. To this end, we propose an implicit neural map representation that is able to capture positional and directional geometric features from 2D LiDAR scans to efficiently represent the environment and learn a neural network that is able to predict both, the non-projective signed distance and a direction-aware projective distance for an arbitrary point in the mapped environment. This combination of neural map representation with a light-weight neural network allows us to design an efficient observation model within a conventional Monte Carlo localization framework for pose estimation of a robot in real time. We evaluated our approach to indoor localization on a publicly available dataset for global localization and the experimental results indicate that our approach is able to more accurately localize a mobile robot than other localization approaches employing occupancy or existing neural map representations. In contrast to other approaches employing an implicit neural map representation for 2D LiDAR localization, our approach allows to perform real-time pose tracking after convergence and near real-time global localization. The code of our approach is available at: https://github.com/PRBonn/enm-mcl.
PINGS: Gaussian Splatting Meets Distance Fields within a Point-Based Implicit Neural Map
Feb 09, 2025Robots require high-fidelity reconstructions of their environment for effective operation. Such scene representations should be both, geometrically accurate and photorealistic to support downstream tasks. While this can be achieved by building distance fields from range sensors and radiance fields from cameras, the scalable incremental mapping of both fields consistently and at the same time with high quality remains challenging. In this paper, we propose a novel map representation that unifies a continuous signed distance field and a Gaussian splatting radiance field within an elastic and compact point-based implicit neural map. By enforcing geometric consistency between these fields, we achieve mutual improvements by exploiting both modalities. We devise a LiDAR-visual SLAM system called PINGS using the proposed map representation and evaluate it on several challenging large-scale datasets. Experimental results demonstrate that PINGS can incrementally build globally consistent distance and radiance fields encoded with a compact set of neural points. Compared to the state-of-the-art methods, PINGS achieves superior photometric and geometric rendering at novel views by leveraging the constraints from the distance field. Furthermore, by utilizing dense photometric cues and multi-view consistency from the radiance field, PINGS produces more accurate distance fields, leading to improved odometry estimation and mesh reconstruction.
Efficient LiDAR Bundle Adjustment for Multi-Scan Alignment Utilizing Continuous-Time Trajectories
Dec 16, 2024Constructing precise global maps is a key task in robotics and is required for localization, surveying, monitoring, or constructing digital twins. To build accurate maps, data from mobile 3D LiDAR sensors is often used. Mapping requires correctly aligning the individual point clouds to each other to obtain a globally consistent map. In this paper, we investigate the problem of multi-scan alignment to obtain globally consistent point cloud maps. We propose a 3D LiDAR bundle adjustment approach to solve the global alignment problem and jointly optimize the available data. Utilizing a continuous-time trajectory allows us to consider the ego-motion of the LiDAR scanner while recording a single scan directly in the least squares adjustment. Furthermore, pruning the search space of correspondences and utilizing out-of-core circular buffer enables our approach to align thousands of point clouds efficiently. We successfully align point clouds recorded with a handheld LiDAR, as well as ones mounted on a vehicle, and are able to perform multi-session alignment.
PIN-SLAM: LiDAR SLAM Using a Point-Based Implicit Neural Representation for Achieving Global Map Consistency
Jan 17, 2024Accurate and robust localization and mapping are essential components for most autonomous robots. In this paper, we propose a SLAM system for building globally consistent maps, called PIN-SLAM, that is based on an elastic and compact point-based implicit neural map representation. Taking range measurements as input, our approach alternates between incremental learning of the local implicit signed distance field and the pose estimation given the current local map using a correspondence-free, point-to-implicit model registration. Our implicit map is based on sparse optimizable neural points, which are inherently elastic and deformable with the global pose adjustment when closing a loop. Loops are also detected using the neural point features. Extensive experiments validate that PIN-SLAM is robust to various environments and versatile to different range sensors such as LiDAR and RGB-D cameras. PIN-SLAM achieves pose estimation accuracy better or on par with the state-of-the-art LiDAR odometry or SLAM systems and outperforms the recent neural implicit SLAM approaches while maintaining a more consistent, and highly compact implicit map that can be reconstructed as accurate and complete meshes. Finally, thanks to the voxel hashing for efficient neural points indexing and the fast implicit map-based registration without closest point association, PIN-SLAM can run at the sensor frame rate on a moderate GPU. Codes will be available at: https://github.com/PRBonn/PIN_SLAM.
LIO-EKF: High Frequency LiDAR-Inertial Odometry using Extended Kalman Filters
Nov 16, 2023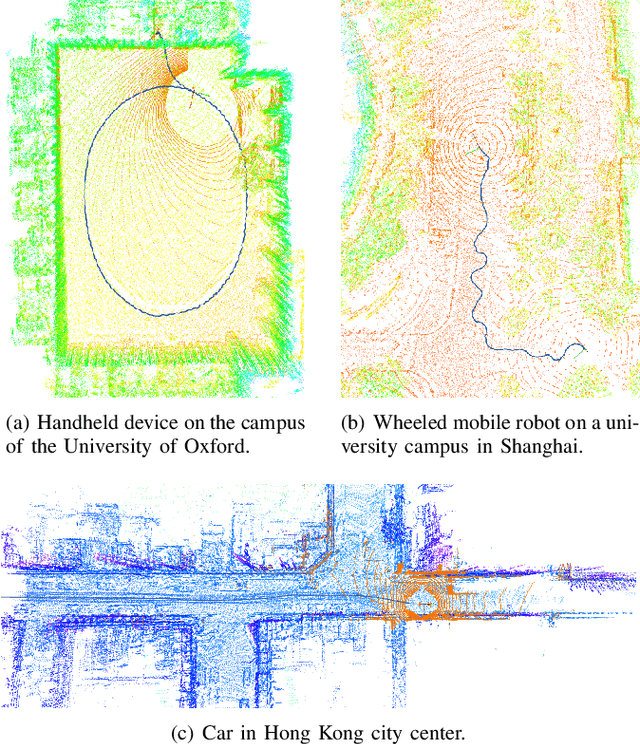
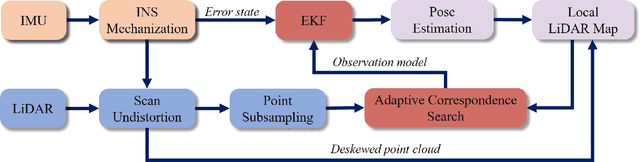
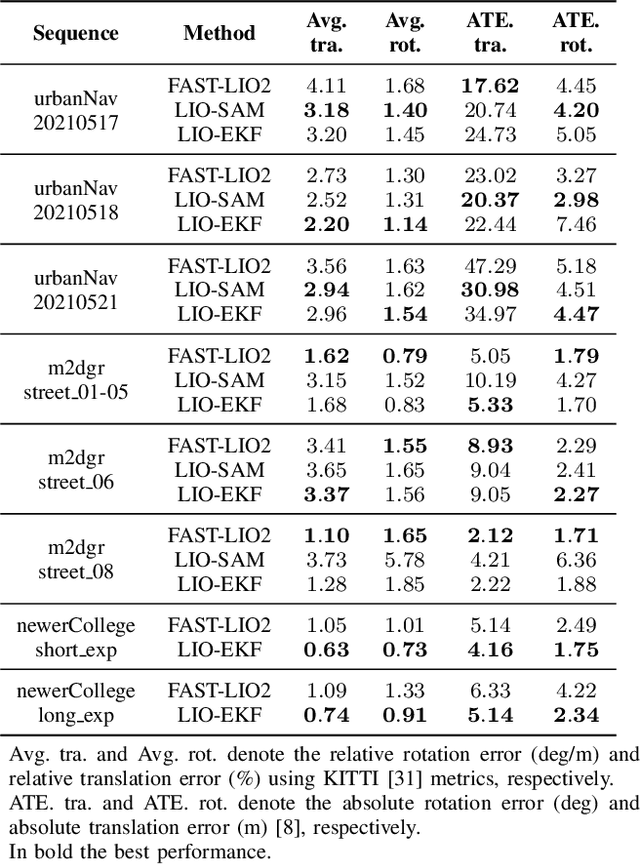
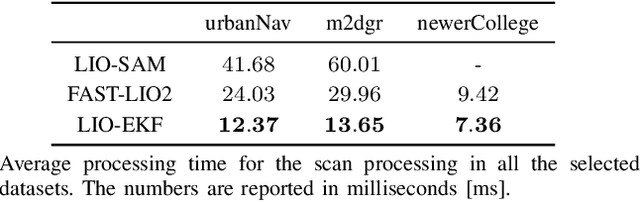
Odometry estimation is a key element for every autonomous system requiring navigation in an unknown environment. In modern mobile robots, 3D LiDAR-inertial systems are often used for this task. By fusing LiDAR scans and IMU measurements, these systems can reduce the accumulated drift caused by sequentially registering individual LiDAR scans and provide a robust pose estimate. Although effective, LiDAR-inertial odometry systems require proper parameter tuning to be deployed. In this paper, we propose LIO-EKF, a tightly-coupled LiDAR-inertial odometry system based on point-to-point registration and the classical extended Kalman filter scheme. We propose an adaptive data association that considers the relative pose uncertainty, the map discretization errors, and the LiDAR noise. In this way, we can substantially reduce the parameters to tune for a given type of environment. The experimental evaluation suggests that the proposed system performs on par with the state-of-the-art LiDAR-inertial odometry pipelines, but is significantly faster in computing the odometry.
KISS-ICP: In Defense of Point-to-Point ICP -- Simple, Accurate, and Robust Registration If Done the Right Way
Sep 30, 2022
Robust and accurate pose estimation of a robotic platform, so-called sensor-based odometry, is an essential part of many robotic applications. While many sensor odometry systems made progress by adding more complexity to the ego-motion estimation process, we move in the opposite direction. By removing a majority of parts and focusing on the core elements, we obtain a surprisingly effective system that is simple to realize and can operate under various environmental conditions using different LiDAR sensors. Our odometry estimation approach relies on point-to-point ICP combined with adaptive thresholding for correspondence matching, a robust kernel, a simple but widely applicable motion compensation approach, and a point cloud subsampling strategy. This yields a system with only a few parameters that in most cases do not even have to be tuned to a specific LiDAR sensor. Our system using the same parameters performs on par with state-of-the-art methods under various operating conditions using different platforms: automotive platforms, UAV-based operation, vehicles like segways, or handheld LiDARs. We do not require integrating IMU information and solely rely on 3D point cloud data obtained from a wide range of 3D LiDAR sensors, thus, enabling a broad spectrum of different applications and operating conditions. Our open-source system operates faster than the sensor frame rate in all presented datasets and is designed for real-world scenarios.
Robust Onboard Localization in Changing Environments Exploiting Text Spotting
Mar 23, 2022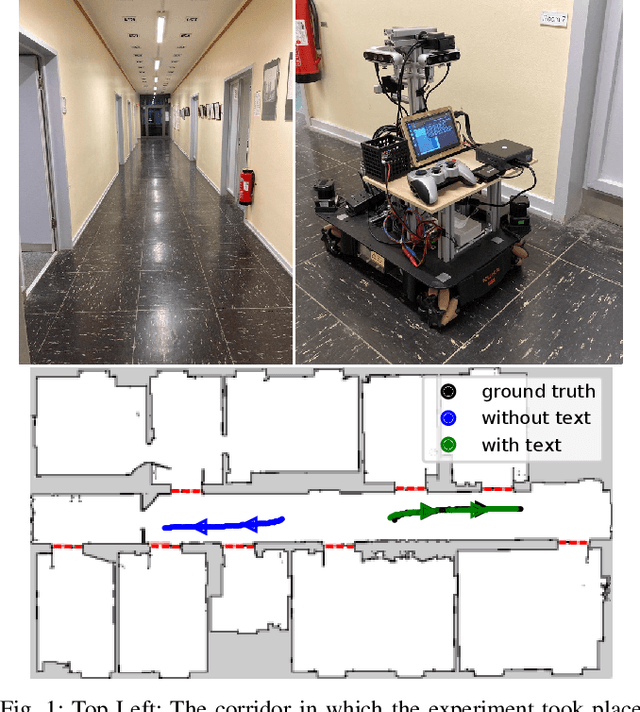
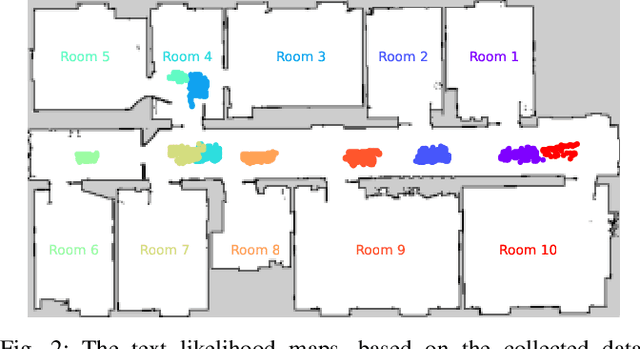
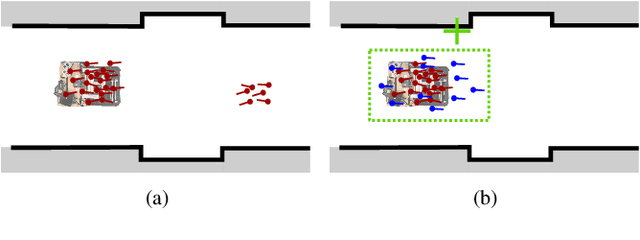
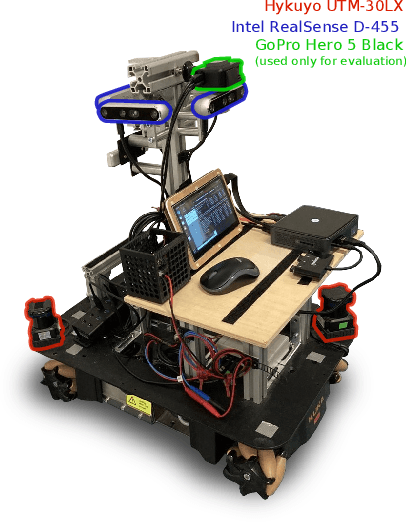
Robust localization in a given map is a crucial component of most autonomous robots. In this paper, we address the problem of localizing in an indoor environment that changes and where prominent structures have no correspondence in the map built at a different point in time. To overcome the discrepancy between the map and the observed environment caused by such changes, we exploit human-readable localization cues to assist localization. These cues are readily available in most facilities and can be detected using RGB camera images by utilizing text spotting. We integrate these cues into a Monte Carlo localization framework using a particle filter that operates on 2D LiDAR scans and camera data. By this, we provide a robust localization solution for environments with structural changes and dynamics by humans walking. We evaluate our localization framework on multiple challenging indoor scenarios in an office environment. The experiments suggest that our approach is robust to structural changes and can run on an onboard computer. We release an open source implementation of our approach (upon paper acceptance), which uses off-the-shelf text spotting, written in C++ with a ROS wrapper.
Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data
May 19, 2021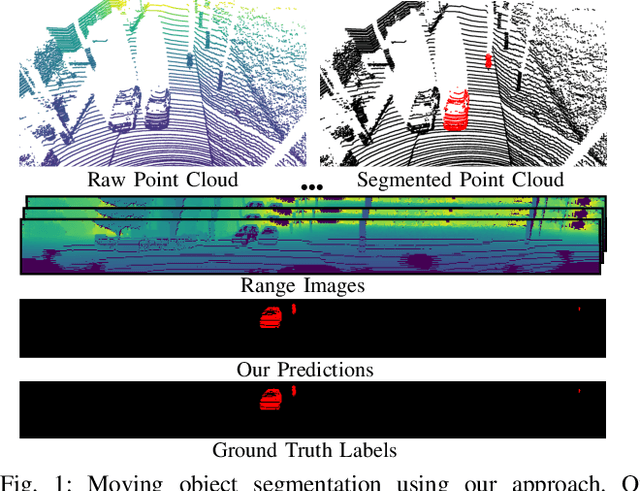
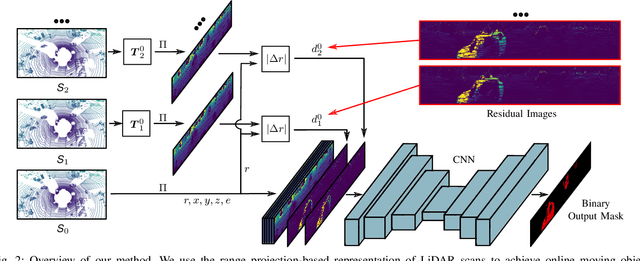
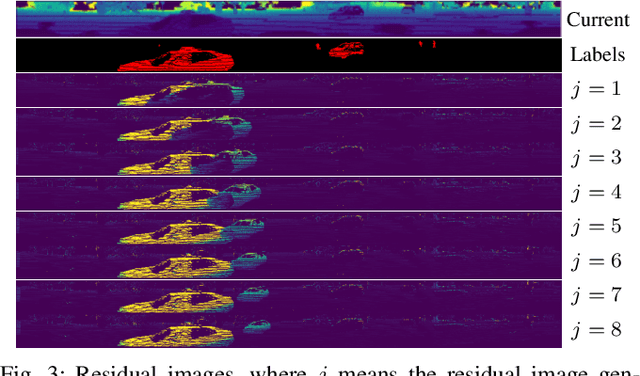
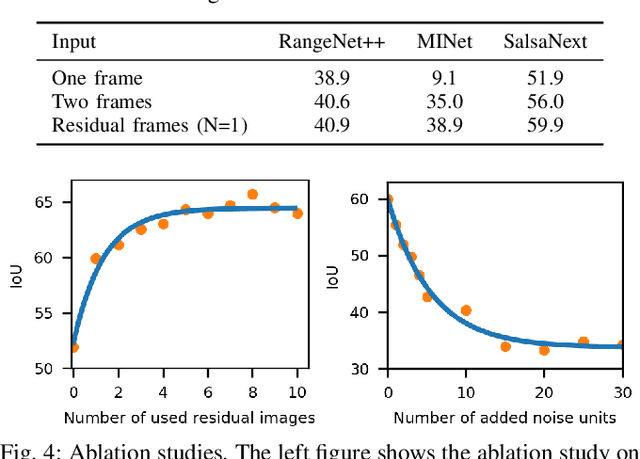
The ability to detect and segment moving objects in a scene is essential for building consistent maps, making future state predictions, avoiding collisions, and planning. In this paper, we address the problem of moving object segmentation from 3D LiDAR scans. We propose a novel approach that pushes the current state of the art in LiDAR-only moving object segmentation forward to provide relevant information for autonomous robots and other vehicles. Instead of segmenting the point cloud semantically, i.e., predicting the semantic classes such as vehicles, pedestrians, buildings, roads, etc., our approach accurately segments the scene into moving and static objects, i.e., distinguishing between moving cars vs. parked cars. Our proposed approach exploits sequential range images from a rotating 3D LiDAR sensor as an intermediate representation combined with a convolutional neural network and runs faster than the frame rate of the sensor. We compare our approach to several other state-of-the-art methods showing superior segmentation quality in urban environments. Additionally, we created a new benchmark for LiDAR-based moving object segmentation based on SemanticKITTI. We publish it to allow other researchers to compare their approaches transparently and we will publish our code.