 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDogLegs: Robust Proprioceptive State Estimation for Legged Robots Using Multiple Leg-Mounted IMUs
Mar 06, 2025



Robust and accurate proprioceptive state estimation of the main body is crucial for legged robots to execute tasks in extreme environments where exteroceptive sensors, such as LiDARs and cameras may become unreliable. In this paper, we propose DogLegs, a state estimation system for legged robots that fuses the measurements from a body-mounted inertial measurement unit (Body-IMU), joint encoders, and multiple leg-mounted IMUs (Leg-IMU) using an extended Kalman filter (EKF). The filter system contains the error states of all IMU frames. The Leg-IMUs are used to detect foot contact, thereby providing zero velocity measurements to update the state of the Leg-IMU frames. Additionally, we compute the relative position constraints between the Body-IMU and Leg-IMUs by the leg kinematics and use them to update the main body state and reduce the error drift of the individual IMU frames. Field experimental results have shown that our proposed system can achieve better state estimation accuracy compared to the traditional leg odometry method (using only Body-IMU and joint encoders) across different terrains. We make our datasets publicly available to benefit the research community.
Wheel-GINS: A GNSS/INS Integrated Navigation System with a Wheel-mounted IMU
Jan 06, 2025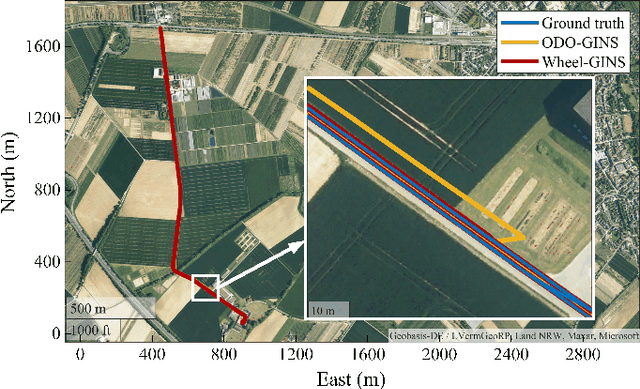
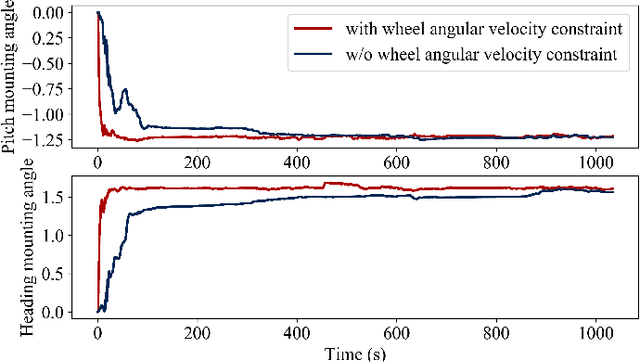
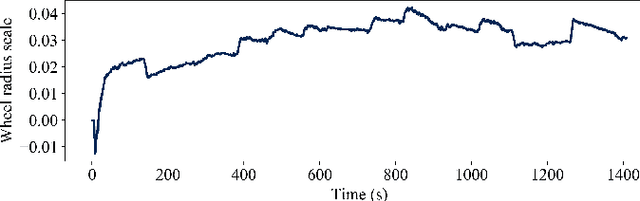
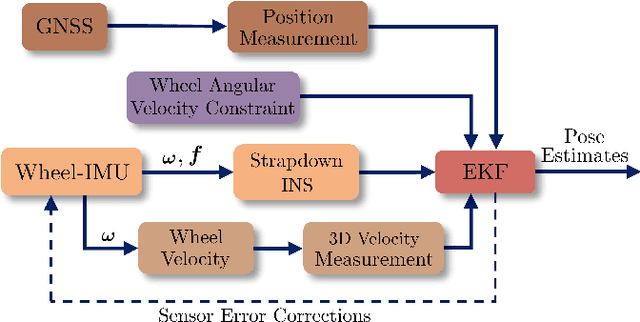
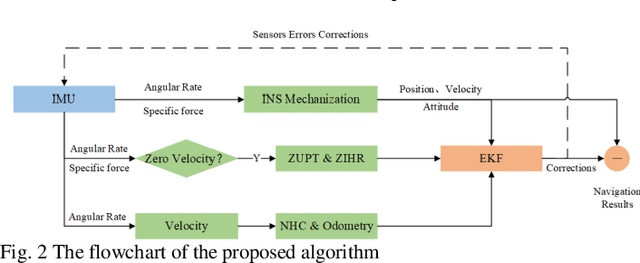
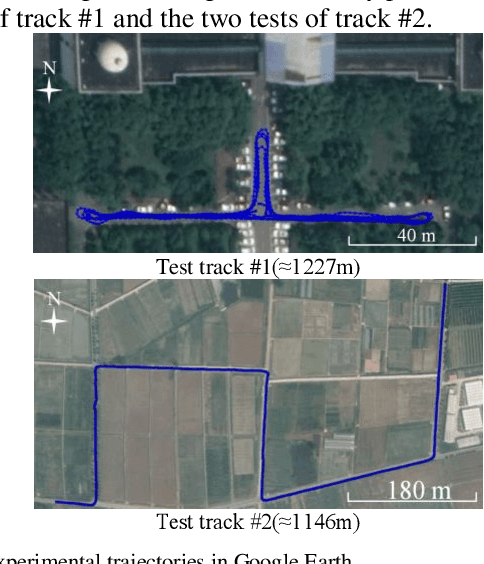
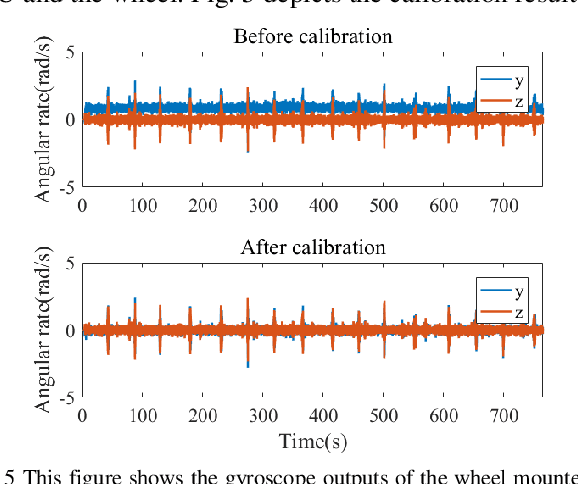
A long-term accurate and robust localization system is essential for mobile robots to operate efficiently outdoors. Recent studies have shown the significant advantages of the wheel-mounted inertial measurement unit (Wheel-IMU)-based dead reckoning system. However, it still drifts over extended periods because of the absence of external correction signals. To achieve the goal of long-term accurate localization, we propose Wheel-GINS, a Global Navigation Satellite System (GNSS)/inertial navigation system (INS) integrated navigation system using a Wheel-IMU. Wheel-GINS fuses the GNSS position measurement with the Wheel-IMU via an extended Kalman filter to limit the long-term error drift and provide continuous state estimation when the GNSS signal is blocked. Considering the specificities of the GNSS/Wheel-IMU integration, we conduct detailed modeling and online estimation of the Wheel-IMU installation parameters, including the Wheel-IMU leverarm and mounting angle and the wheel radius error. Experimental results have shown that Wheel-GINS outperforms the traditional GNSS/Odometer/INS integrated navigation system during GNSS outages. At the same time, Wheel-GINS can effectively estimate the Wheel-IMU installation parameters online and, consequently, improve the localization accuracy and practicality of the system. The source code of our implementation is publicly available (https://github.com/i2Nav-WHU/Wheel-GINS).
LIO-EKF: High Frequency LiDAR-Inertial Odometry using Extended Kalman Filters
Nov 16, 2023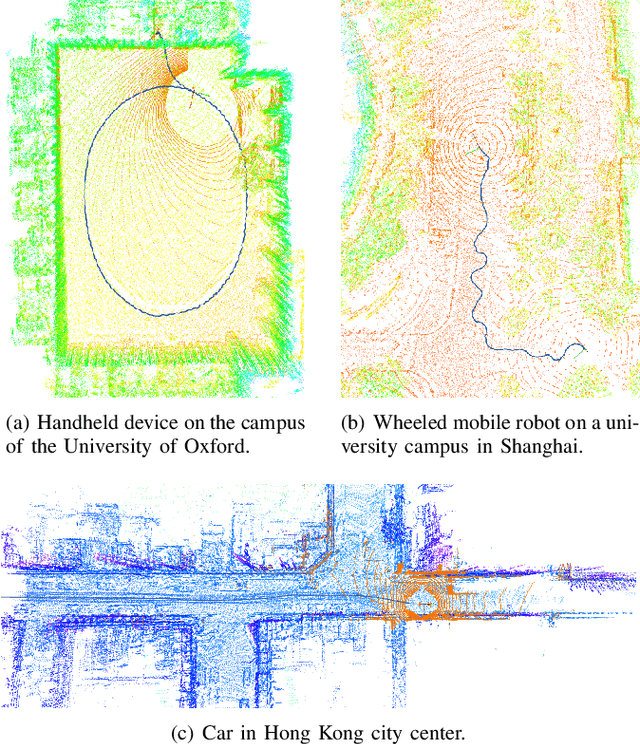
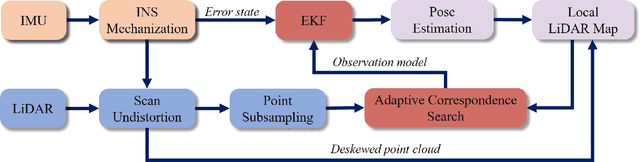
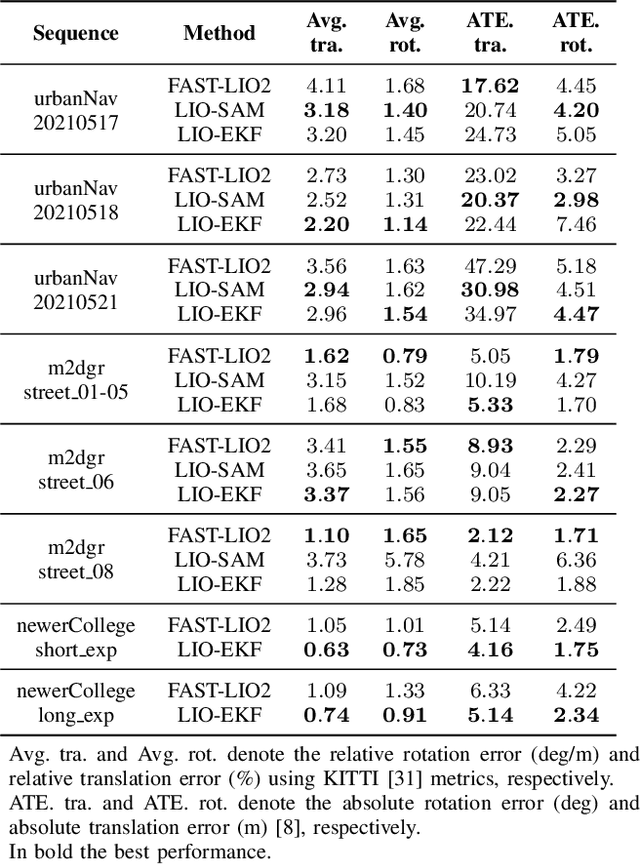
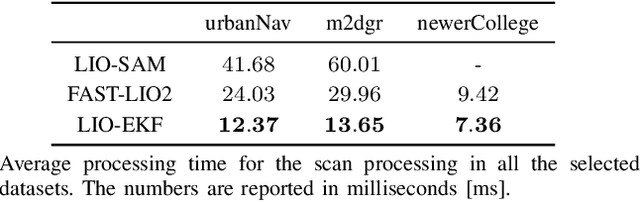
Odometry estimation is a key element for every autonomous system requiring navigation in an unknown environment. In modern mobile robots, 3D LiDAR-inertial systems are often used for this task. By fusing LiDAR scans and IMU measurements, these systems can reduce the accumulated drift caused by sequentially registering individual LiDAR scans and provide a robust pose estimate. Although effective, LiDAR-inertial odometry systems require proper parameter tuning to be deployed. In this paper, we propose LIO-EKF, a tightly-coupled LiDAR-inertial odometry system based on point-to-point registration and the classical extended Kalman filter scheme. We propose an adaptive data association that considers the relative pose uncertainty, the map discretization errors, and the LiDAR noise. In this way, we can substantially reduce the parameters to tune for a given type of environment. The experimental evaluation suggests that the proposed system performs on par with the state-of-the-art LiDAR-inertial odometry pipelines, but is significantly faster in computing the odometry.
Wheel-SLAM: Simultaneous Localization and Terrain Mapping Using One Wheel-mounted IMU
Nov 06, 2022A reliable pose estimator robust to environmental disturbances is desirable for mobile robots. To this end, inertial measurement units (IMUs) play an important role because they can perceive the full motion state of the vehicle independently. However, it suffers from accumulative error due to inherent noise and bias instability, especially for low-cost sensors. In our previous studies on Wheel-INS \cite{niu2021, wu2021}, we proposed to limit the error drift of the pure inertial navigation system (INS) by mounting an IMU to the wheel of the robot to take advantage of rotation modulation. However, it still drifted over a long period of time due to the lack of external correction signals. In this letter, we propose to exploit the environmental perception ability of Wheel-INS to achieve simultaneous localization and mapping (SLAM) with only one IMU. To be specific, we use the road bank angles (mirrored by the robot roll angles estimated by Wheel-INS) as terrain features to enable the loop closure with a Rao-Blackwellized particle filter. The road bank angle is sampled and stored according to the robot position in the grid maps maintained by the particles. The weights of the particles are updated according to the difference between the currently estimated roll sequence and the terrain map. Field experiments suggest the feasibility of the idea to perform SLAM in Wheel-INS using the robot roll angle estimates. In addition, the positioning accuracy is improved significantly (more than 30\%) over Wheel-INS. Source code of our implementation is publicly available (https://github.com/i2Nav-WHU/Wheel-SLAM).
Wheel-INS2: Multiple MEMS IMU-based Dead Reckoning System for Wheeled Robots with Evaluation of Different IMU Configurations
Dec 19, 2020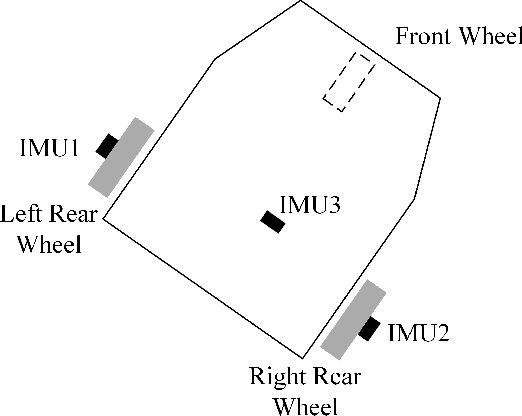
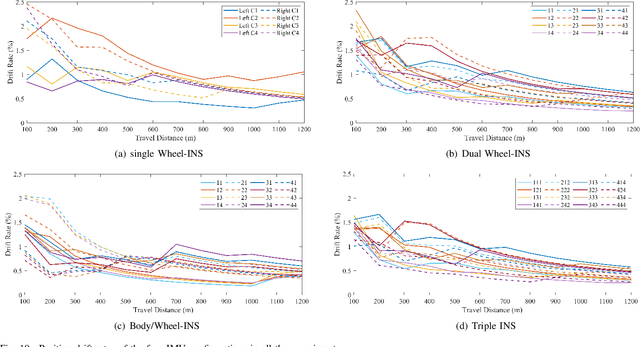
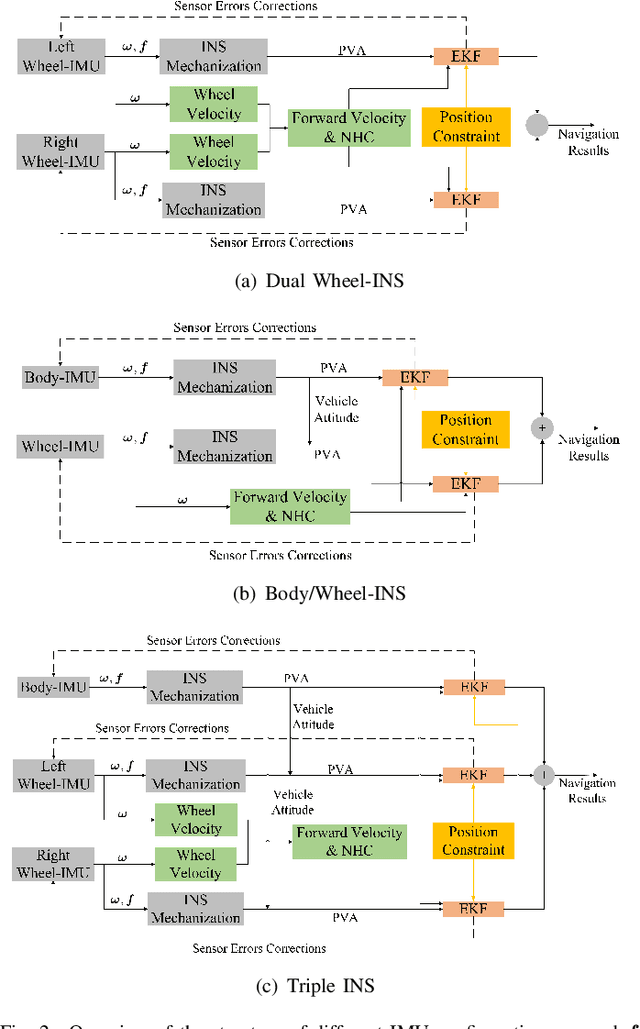
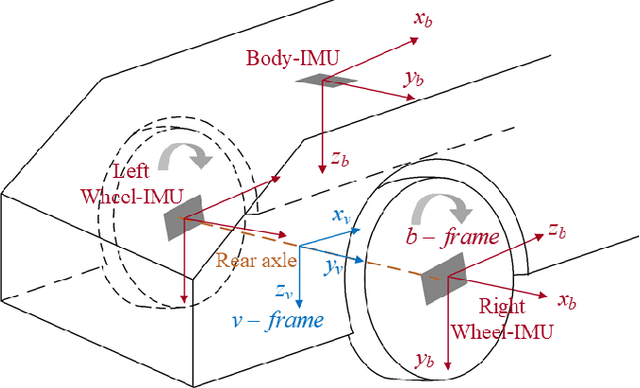
A reliable self-contained navigation system is essential for autonomous vehicles. In this study, we propose a multiple microelectromechanical system (MEMS) inertial measurement unit (IMU)-based dead reckoning (DR) solution for wheeled vehicles. The IMUs are located at different places on the wheeled vehicle to acquire various dynamic information. In the proposed system, at least one IMU has to be mounted at the wheel to measure the wheel velocity, thus, replacing the traditional odometer. The other IMUs can be mounted on either the remaining wheels or the vehicle body. The system is implemented through a decentralized extended Kalman filter structure in which each subsystem (corresponding to each IMU) retains and updates its own states separately. The relative position constraint between the IMUs is exploited by fusing the IMU positions to calculate the coordinates of the reference point, which is treated as an external observation of the subsystems. Specially, we present the DR systems based on dual wheel-mounted IMUs (Wheel-IMUs), one Wheel-IMU plus one vehicle body-mounted IMU (Body-IMU), and dual Wheel-IMUs plus one Body-IMU as examples for analysis and experiments. Field tests illustrate that the proposed multiple IMU-based DR system statistically outperforms the single Wheel-IMU based DR system in positioning and heading accuracy. Moreover, of the three multi-IMU configurations, the one Body IMU plus one Wheel-IMU design obtains the minimum drift rate.
A Comparison of Three Measurement Models for the Wheel-mounted MEMS IMU-based Dead Reckoning System
Dec 19, 2020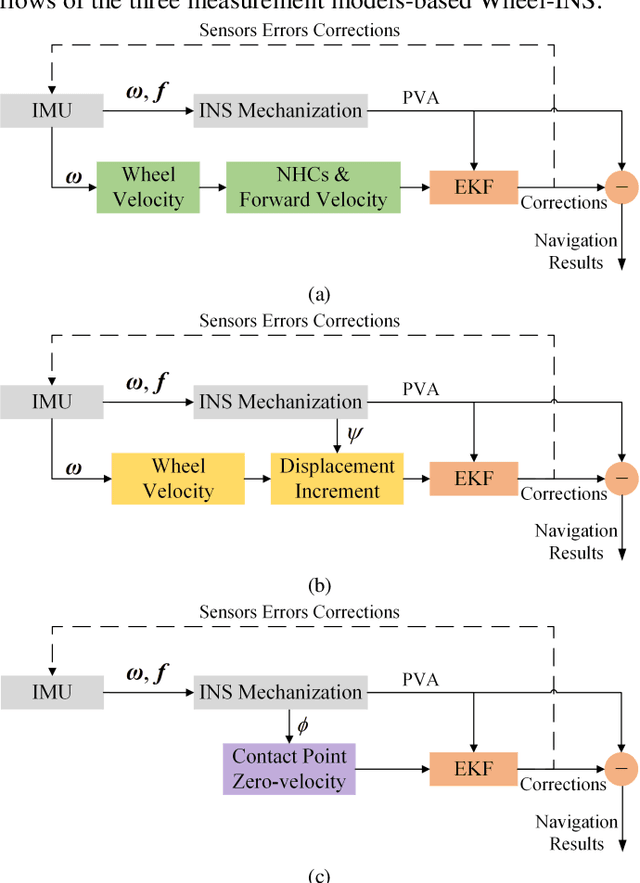
A self-contained autonomous navigation system is desired to complement the Global Navigation Satellite System (GNSS) for land vehicles, for which odometer aided inertial navigation system (ODO/INS) is a classical solution. In this study, we use a wheel-mounted MEMS IMU (Wheel-IMU) to substitute the conventional odometer, and further, investigate three types of measurement models, including the velocity measurement, displacement increment measurement, and contact point zero-velocity measurement, in the Wheel-IMU based dead reckoning (DR) system. The three measurements, along with the non-holonomic constraints (NHCs) are fused with INS by an extended Kalman filter (EKF). Theoretical discussion and field tests illustrate their feasibility and equivalence in overall positioning performance, which have the maximum horizontal position drifts less than 2% of the total travelled distance. However, the displacement increment measurement model is less sensitive to the installation lever arm between the Wheel-IMU and wheel center.
WM-INS: A Wheel Mounted IMU Based Integrated Navigation System for Wheeled Robots
Dec 29, 2019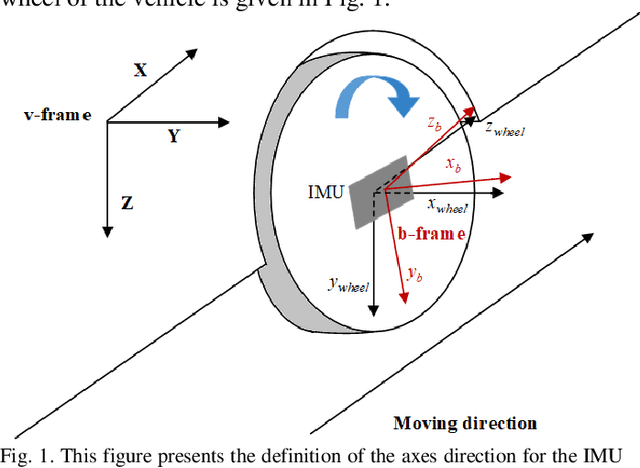
Microelectromechanical systems (MEMS) based inertial navigation systems (INS) are widely used for robot navigation as they are self-contained and low-cost for motion perception. Various methods have been utilized to restrict the error growth caused by the inherent inertial sensor noises. Inspired by the rotation-modulation INS that using intentional rotation to mitigate the drift errors, we propose an integrated navigation solution for mobile robots based on a single wheel mounted MEMS IMU. The IMU is leveraged to produce odometry measurements with wheel radius and estimate the wheel motion. Zero-type constraints and the vehicle motion constraints are also introduced to limit the navigation errors. Field experiments prove that the rotation scheme can effectively reduce the heading error. The horizontal position accuracy of the proposed system is two times better than the conventional odometry aided INS for large-scale polyline trajectory tests. The cancellation effect of the track on navigation errors drift is also illustrated.
Equations Derivation of VINS-Mono
Dec 16, 2019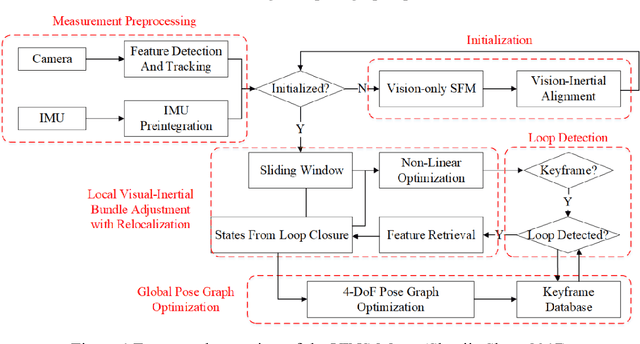
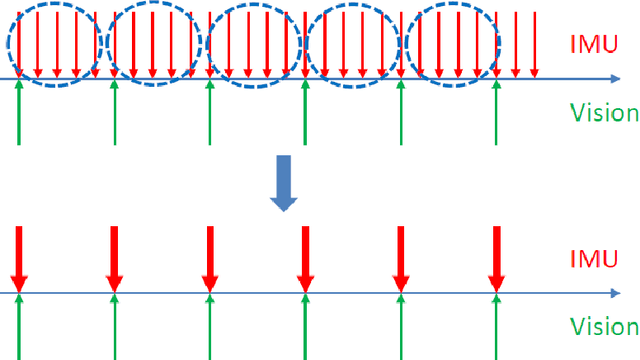
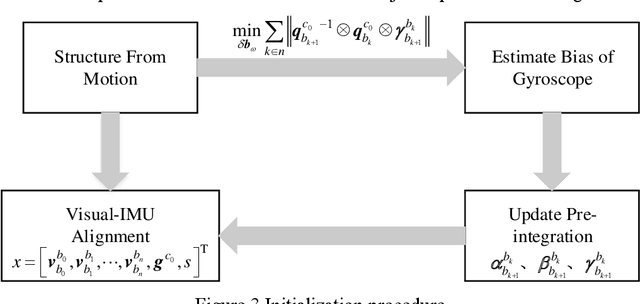
The VINS-Mono is a monocular visual-inertial 6 DOF state estimator proposed by Aerial Robotics Group at HKUST in 2017, which can be performed on MAVs, smartphones and many other intelligent platforms. It is a state-of-the-art visual-inertial odometry algorithms which has gained extensive attention worldwide. The main equations including IMU preintegration, visual/inertial co-initialization and tightly-coupled nonlinear optimization are derived and analyzed in this manuscript.