 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProject Prometheus: Bridging the Intent Gap in Agentic Program Repair via Reverse-Engineered Executable Specifications
Apr 19, 2026The transition from neural machine translation to agentic workflows has revolutionized Automated Program Repair (APR). However, existing agents, despite their advanced reasoning capabilities, frequently suffer from the ``Intent Gap'' -- the misalignment between the generated patch and the developer's original intent. Current solutions relying on natural language summaries or adversarial sampling often fail to provide the deterministic constraints required for surgical repairs. In this paper, we introduce \textsc{Prometheus}, a novel framework that bridges this gap by prioritizing \textit{Specification Inference} over code generation. We employ Behavior-Driven Development (BDD) as an executable contract, utilizing a multi-agent architecture to reverse-engineer Gherkin specifications from runtime failure reports. To resolve the ``Hallucination of Intent,'' we propose a \textbf{Requirement Quality Assurance (RQA) Loop}, a mechanism that leverages ground-truth code as a proxy oracle to validate inferred specifications. We evaluated \textsc{Prometheus} on 680 defects from the Defects4J benchmark. The results are transformative: our framework achieved a total correct patch rate of \textbf{93.97\%} (639/680). More significantly, it demonstrated a \textbf{Rescue Rate of 74.4\%}, successfully repairing 119 complex bugs that a strong blind agent failed to resolve. Qualitative analysis reveals that explicit intent guides agents away from structurally invasive over-engineering toward precise, minimal corrections. Our findings suggest that the future of APR lies not in larger models, but in the capability to align code with verified, \textbf{Executable Specifications} -- whether pre-existing or reverse-engineered.
FFT-Free PAPR Reduction Methods for OFDM Signals
Sep 17, 2025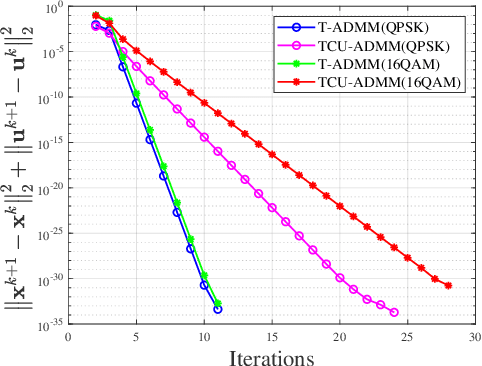
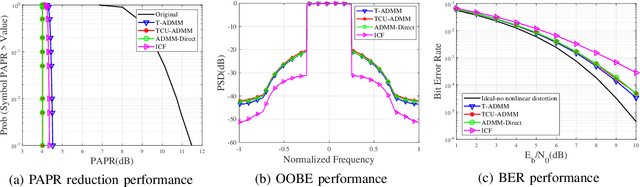
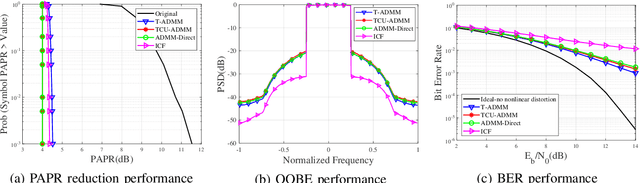
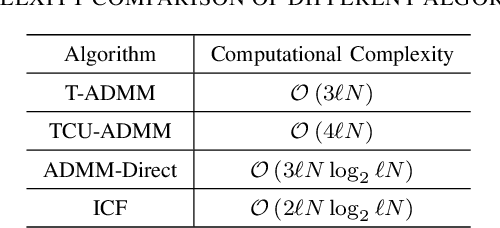
In this paper, we propose two low-complexity peak to average power ratio(PAPR) reduction algorithms for orthogonal frequency division multiplexing(OFDM) signals. The main content is as follows: First, a non-convex optimization model is established by minimizing the signal distortion power. Then, a customized alternating direction method of multipliers(ADMM) algorithm is proposed to solve the problem, named time domain ADMM(T-ADMM) along with an improved version called T-ADMM with constrain update(TCU-ADMM). In the algorithms, all subproblems can be solved analytically, and each iteration has linear computational complexity. These algorithms circumvents the challenges posed by repeated fast Fourier transform(FFT) and inverse FFT(IFFT) operations in traditional PAPR reduction algorithms. Additionally, we prove that the T-ADMM algorithm is theoretically guaranteed convergent if proper parameter is chosen. Finally, simulation results demonstrate the effectiveness of the proposed methods.
Unimodular Waveform Design for Integrated Sensing and Communication MIMO System via Manifold Optimization
Apr 08, 2025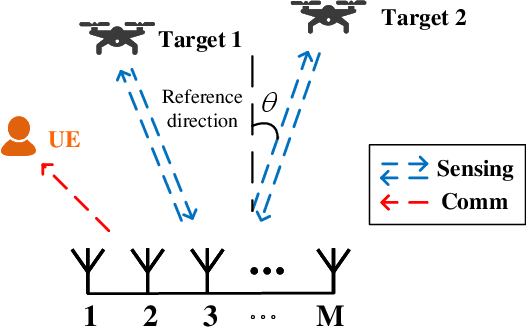
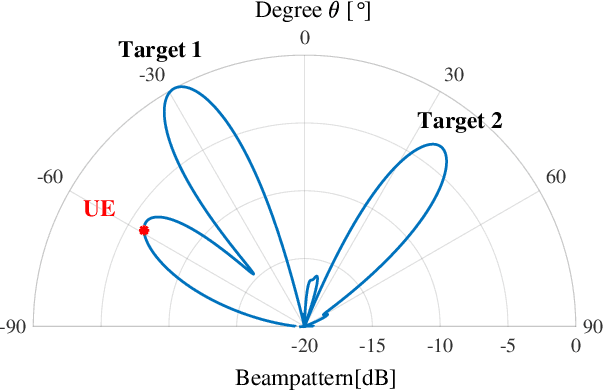
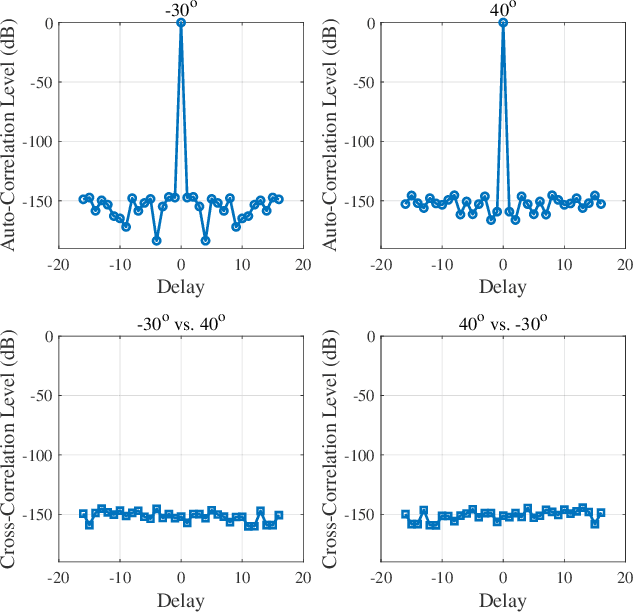
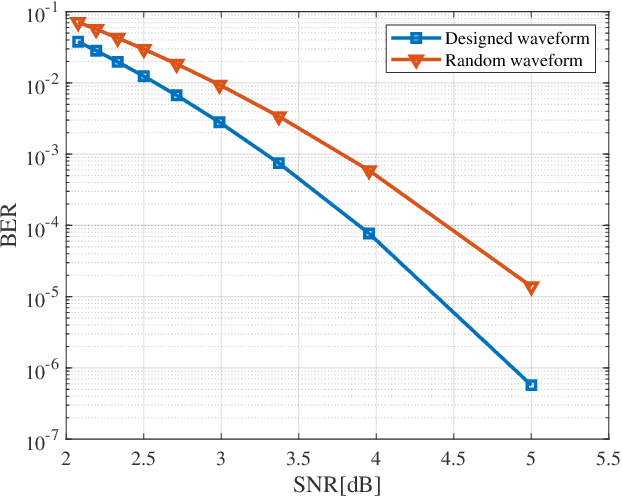
Integrated sensing and communication (ISAC) has been widely recognized as one of the key technologies for 6G wireless networks. In this paper, we focus on the waveform design of ISAC system, which can realize radar sensing while also facilitate information transmission. The main content is as follows: first, we formulate the waveform design problem as a nonconvex and non-smooth model with a unimodulus constraint based on the measurement metric of the radar and communication system. Second, we transform the model into an unconstrained problem on the Riemannian manifold and construct the corresponding operators by analyzing the unimodulus constraint. Third, to achieve the solution efficiently, we propose a low-complexity non-smooth unimodulus manifold gradient descent (N-UMGD) algorithm with theoretical convergence guarantee. The simulation results show that the proposed algorithm can concentrate the energy of the sensing signal in the desired direction and realize information transmission with a low bit error rate.
Safe and Agile Transportation of Cable-Suspended Payload via Multiple Aerial Robots
Jan 25, 2025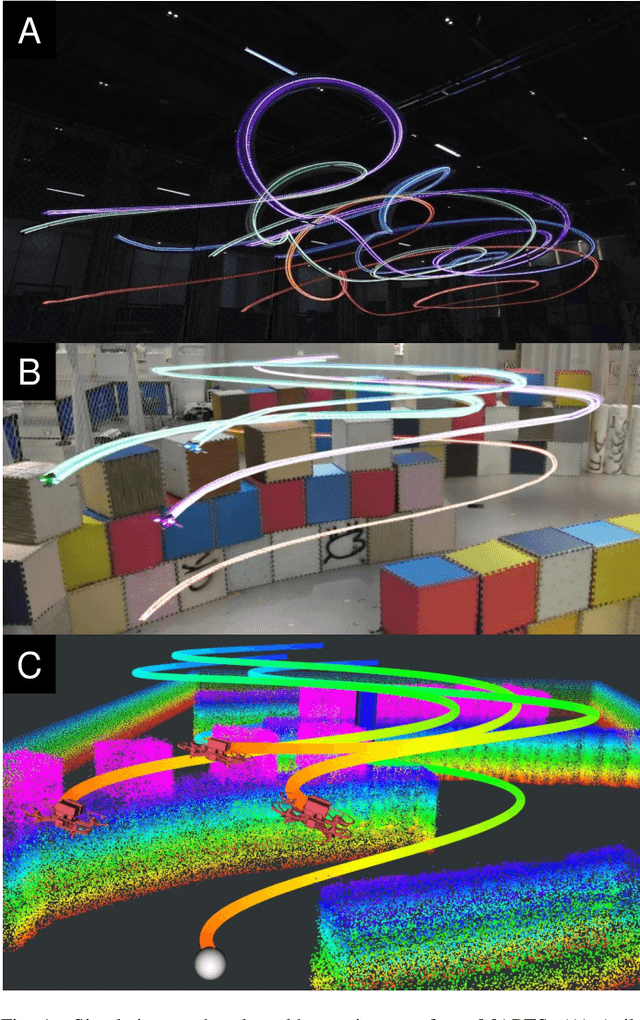
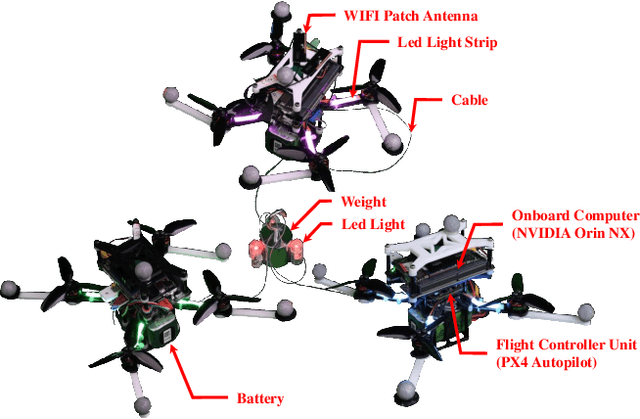
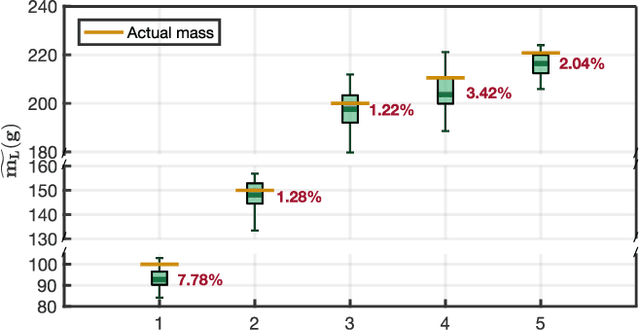
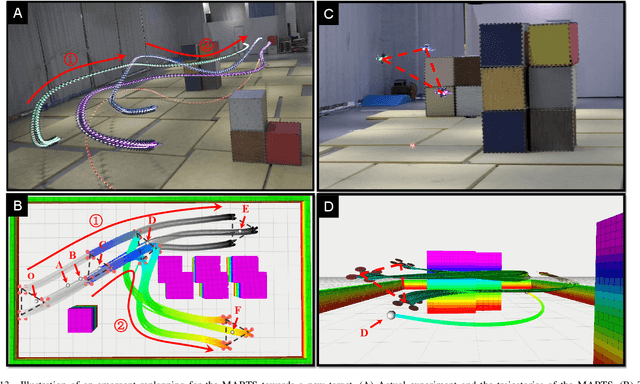
Transporting a heavy payload using multiple aerial robots (MARs) is an efficient manner to extend the load capacity of a single aerial robot. However, existing schemes for the multiple aerial robots transportation system (MARTS) still lack the capability to generate a collision-free and dynamically feasible trajectory in real-time and further track an agile trajectory especially when there are no sensors available to measure the states of payload and cable. Therefore, they are limited to low-agility transportation in simple environments. To bridge the gap, we propose complete planning and control schemes for the MARTS, achieving safe and agile aerial transportation (SAAT) of a cable-suspended payload in complex environments. Flatness maps for the aerial robot considering the complete kinematical constraint and the dynamical coupling between each aerial robot and payload are derived. To improve the responsiveness for the generation of the safe, dynamically feasible, and agile trajectory in complex environments, a real-time spatio-temporal trajectory planning scheme is proposed for the MARTS. Besides, we break away from the reliance on the state measurement for both the payload and cable, as well as the closed-loop control for the payload, and propose a fully distributed control scheme to track the agile trajectory that is robust against imprecise payload mass and non-point mass payload. The proposed schemes are extensively validated through benchmark comparisons, ablation studies, and simulations. Finally, extensive real-world experiments are conducted on a MARTS integrated by three aerial robots with onboard computers and sensors. The result validates the efficiency and robustness of our proposed schemes for SAAT in complex environments.
Designing Unimodular Waveforms with Good Correlation Properties for Large-Scale MIMO Radar via Manifold Optimization Method
Oct 10, 2024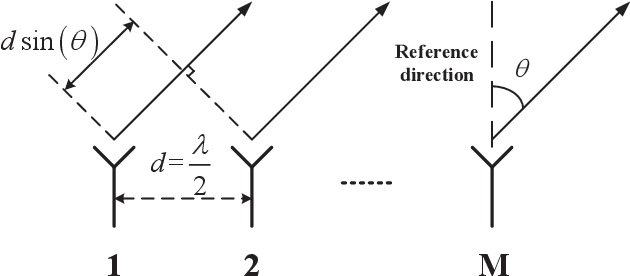
In this paper, we design constant modulus probing waveforms with good correlation properties for large-scale collocated multi-input multi-output (MIMO) radar systems. The main content is as follows: First, we formulate the design problem as a fourth-order polynomial minimization problem with unimodulus constraints. Then, by analyzing the geometric properties of the unimodulus constraints through Riemannian geometry theory and embedding them into the search space, we transform the original non-convex optimization problem into an unconstrained problem on a Riemannian manifold for solution. Second, we convert the objective function into the form of a large but finite number of loss functions and employ a customized R-SVRG algorithm to solve it. Third, we prove that the customized R-SVRG algorithm is theoretically guaranteed to converge if appropriate parameters are chosen. Numerical examples demonstrate the effectiveness of the proposed R-SVRG algorithm.
Design of Artificial Interference Signals for Covert Communication Aided by Multiple Friendly Nodes
Apr 14, 2024



In this paper, we consider the scenario of covert communication aided by multiple friendly interference nodes. The objective is to conceal the legitimate communication link under the surveillance of a warden. We propose a novel strategy for generating artificial noise signals. In the absence of accurate channel fading information between the friendly interference nodes and the legitimate receiver, we leverage the statistical information of channel coefficients to optimize the basis matrix of the artificial noise signals space. The optimization aims to design artificial noise signals within the space to facilitate covert communication while minimizing the impact on the performance of legitimate communication. Due to the non-convex nature of the basis matrix constraints, the optimization problem is challenging to solve. Therefore, we employ the Riemannian optimization framework to analyze the geometric structure of the basis matrix constraints and transform the original non-convex optimization problem into an unconstrained problem on the complex Stiefel manifold for solution. Specifically, we utilize the Riemannian Stochastic Variance Reduced Gradient (R-SVRG) algorithm on the complex Stiefel manifold to solve the problem, significantly reducing the computational burden per iteration compared to full gradient algorithms. Additionally, we theoretically prove the convergence of the proposed algorithm to a stationary point. Finally, the performance of the proposed artificial noise strategy can be evaluated through numerical simulations, and compared to the Gaussian artificial noise strategy without optimization, the proposed strategy significantly improves covert performance.
On the design of Massive MIMO-QAM detector via $\ell_2$-Box ADMM approach
Aug 28, 2022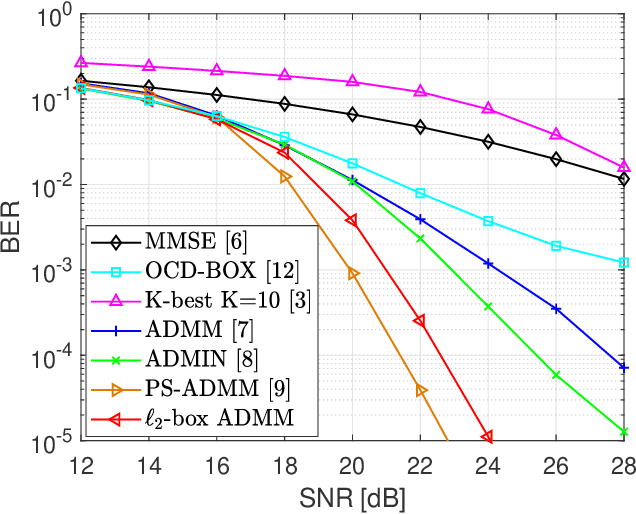
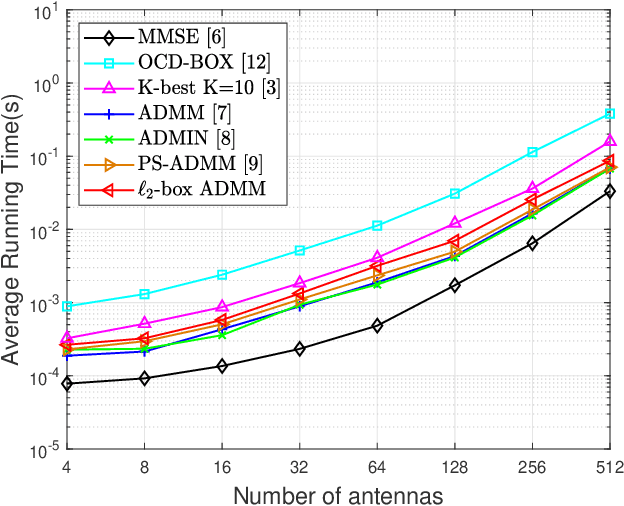
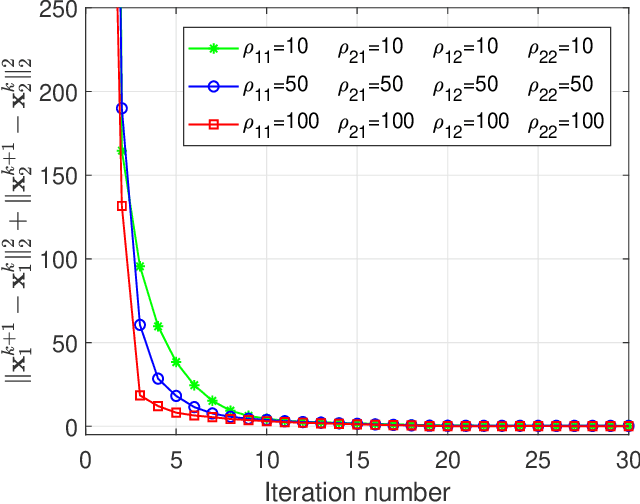
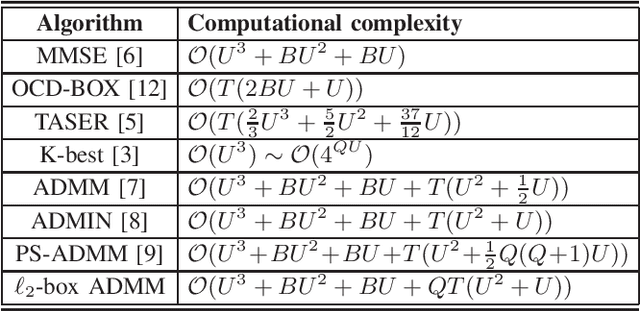
In this letter, we develop an $\ell_2$-box maximum likelihood (ML) formulation for massive multiple-input multiple-output (MIMO) quadrature amplitude modulation (QAM) signal detection and customize an alternating direction method of multipliers (ADMM) algorithm to solve the nonconvex optimization model. In the $\ell_2$-box ADMM implementation, all variables are solved analytically. Moreover, several theoretical results related to convergence, iteration complexity, and computational complexity are presented. Simulation results demonstrate the effectiveness of the proposed $\ell_2$-box ADMM detector in comparison with state-of-the-arts approaches.
Multi-Level Contrastive Learning for Cross-Lingual Alignment
Feb 26, 2022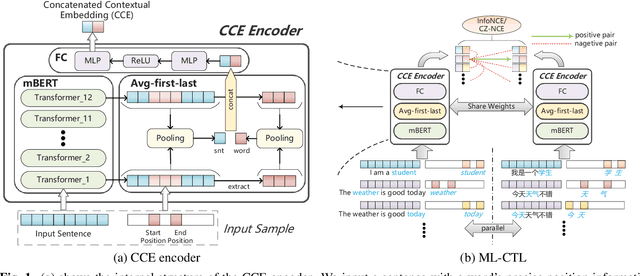
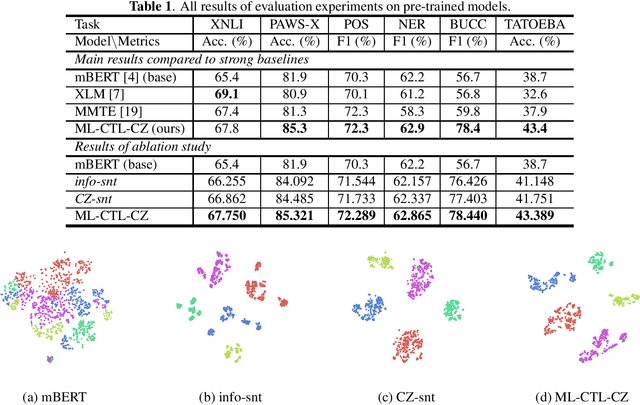
Cross-language pre-trained models such as multilingual BERT (mBERT) have achieved significant performance in various cross-lingual downstream NLP tasks. This paper proposes a multi-level contrastive learning (ML-CTL) framework to further improve the cross-lingual ability of pre-trained models. The proposed method uses translated parallel data to encourage the model to generate similar semantic embeddings for different languages. However, unlike the sentence-level alignment used in most previous studies, in this paper, we explicitly integrate the word-level information of each pair of parallel sentences into contrastive learning. Moreover, cross-zero noise contrastive estimation (CZ-NCE) loss is proposed to alleviate the impact of the floating-point error in the training process with a small batch size. The proposed method significantly improves the cross-lingual transfer ability of our basic model (mBERT) and outperforms on multiple zero-shot cross-lingual downstream tasks compared to the same-size models in the Xtreme benchmark.
Efficient ADMM Decoder for Non-binary LDPC Codes with Codeword-Independent Performance
Feb 07, 2022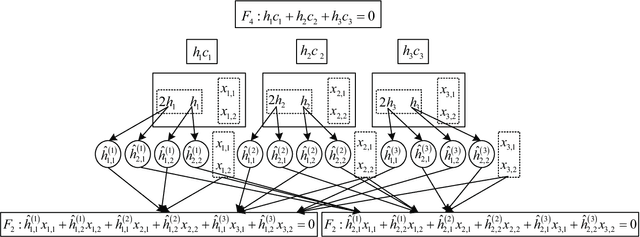
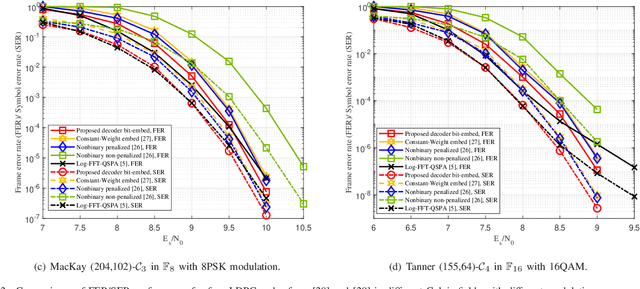

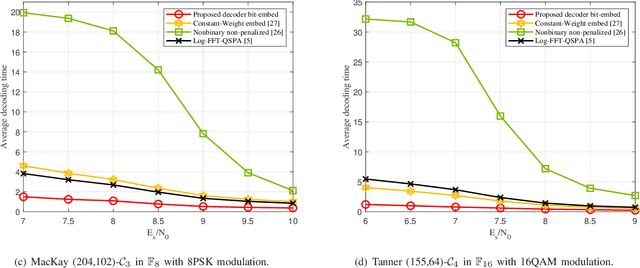
In this paper, we devote to devise a non-binary low-density parity-check (LDPC) decoder in Galois fields of characteristic two ($\mathbb{F}_{2^q}$) via the alternating direction method of multipliers (ADMM) technique. Through the proposed bit embedding technique and the decomposition technique of the three-variables parity-check equation, an efficient ADMM decoding algorithm for non-binary LDPC codes is proposed. The computation complexity in each ADMM iteration is roughly $\mathcal{O}(nq)$, which is significantly lower than the existing LDPC decoders. Moreover, we prove that the proposed decoder satisfies the favorable property of the codeword-independent. Simulation results demonstrate the outstanding performance of the proposed decoder in contrast with state-of-the-art LDPC decoders.
Secure Hybrid Beamforming for IRS-Assisted Millimeter Wave Systems
Jan 09, 2022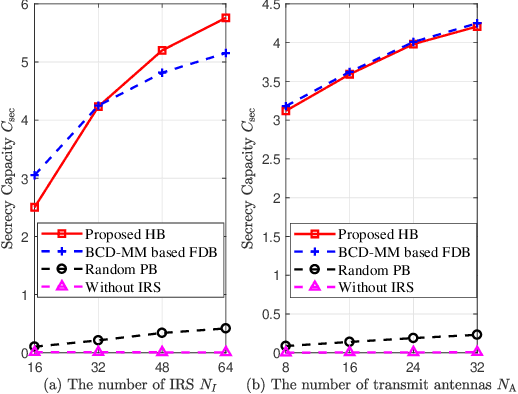
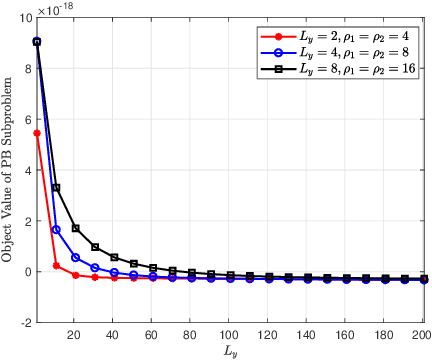
In this paper, we investigate the secure beamforming design in an intelligent reflection surface (IRS) assisted millimeter wave (mmWave) system, where the hybrid beamforming (HB) and the passive beamforming (PB) are employed by the transmitter and the IRS, respectively. To maximize the secrecy capacity, the joint optimization of HB and PB is formulated as a nonconvex problem with constant-modulus constraints. To efficiently solve such a challenging problem, the original problem is decomposed into a PB subproblem and an HB subproblem, then these two subproblems are sequentially solved by proposed algorithms. Simulation results demonstrate the superior performance of proposed approach in comparison with the state-of-the-art works.