 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Localisation of Spatial-Temporal Graph Neural Network
Jan 08, 2025



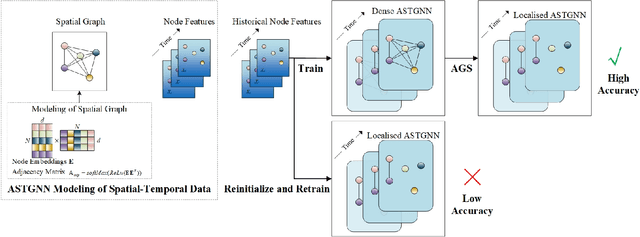
Spatial-temporal data, fundamental to many intelligent applications, reveals dependencies indicating causal links between present measurements at specific locations and historical data at the same or other locations. Within this context, adaptive spatial-temporal graph neural networks (ASTGNNs) have emerged as valuable tools for modelling these dependencies, especially through a data-driven approach rather than pre-defined spatial graphs. While this approach offers higher accuracy, it presents increased computational demands. Addressing this challenge, this paper delves into the concept of localisation within ASTGNNs, introducing an innovative perspective that spatial dependencies should be dynamically evolving over time. We introduce \textit{DynAGS}, a localised ASTGNN framework aimed at maximising efficiency and accuracy in distributed deployment. This framework integrates dynamic localisation, time-evolving spatial graphs, and personalised localisation, all orchestrated around the Dynamic Graph Generator, a light-weighted central module leveraging cross attention. The central module can integrate historical information in a node-independent manner to enhance the feature representation of nodes at the current moment. This improved feature representation is then used to generate a dynamic sparse graph without the need for costly data exchanges, and it supports personalised localisation. Performance assessments across two core ASTGNN architectures and nine real-world datasets from various applications reveal that \textit{DynAGS} outshines current benchmarks, underscoring that the dynamic modelling of spatial dependencies can drastically improve model expressibility, flexibility, and system efficiency, especially in distributed settings.
A Weakly Supervised and Globally Explainable Learning Framework for Brain Tumor Segmentation
Aug 02, 2024



Machine-based brain tumor segmentation can help doctors make better diagnoses. However, the complex structure of brain tumors and expensive pixel-level annotations present challenges for automatic tumor segmentation. In this paper, we propose a counterfactual generation framework that not only achieves exceptional brain tumor segmentation performance without the need for pixel-level annotations, but also provides explainability. Our framework effectively separates class-related features from class-unrelated features of the samples, and generate new samples that preserve identity features while altering class attributes by embedding different class-related features. We perform topological data analysis on the extracted class-related features and obtain a globally explainable manifold, and for each abnormal sample to be segmented, a meaningful normal sample could be effectively generated with the guidance of the rule-based paths designed within the manifold for comparison for identifying the tumor regions. We evaluate our proposed method on two datasets, which demonstrates superior performance of brain tumor segmentation. The code is available at https://github.com/xrt11/tumor-segmentation.
Pre-Training Identification of Graph Winning Tickets in Adaptive Spatial-Temporal Graph Neural Networks
Jun 12, 2024In this paper, we present a novel method to significantly enhance the computational efficiency of Adaptive Spatial-Temporal Graph Neural Networks (ASTGNNs) by introducing the concept of the Graph Winning Ticket (GWT), derived from the Lottery Ticket Hypothesis (LTH). By adopting a pre-determined star topology as a GWT prior to training, we balance edge reduction with efficient information propagation, reducing computational demands while maintaining high model performance. Both the time and memory computational complexity of generating adaptive spatial-temporal graphs is significantly reduced from $\mathcal{O}(N^2)$ to $\mathcal{O}(N)$. Our approach streamlines the ASTGNN deployment by eliminating the need for exhaustive training, pruning, and retraining cycles, and demonstrates empirically across various datasets that it is possible to achieve comparable performance to full models with substantially lower computational costs. Specifically, our approach enables training ASTGNNs on the largest scale spatial-temporal dataset using a single A6000 equipped with 48 GB of memory, overcoming the out-of-memory issue encountered during original training and even achieving state-of-the-art performance. {Furthermore, we delve into the effectiveness of the GWT from the perspective of spectral graph theory, providing substantial theoretical support.} This advancement not only proves the existence of efficient sub-networks within ASTGNNs but also broadens the applicability of the LTH in resource-constrained settings, marking a significant step forward in the field of graph neural networks. Code is available at https://anonymous.4open.science/r/paper-1430.
RED: A Systematic Real-Time Scheduling Approach for Robotic Environmental Dynamics
Aug 29, 2023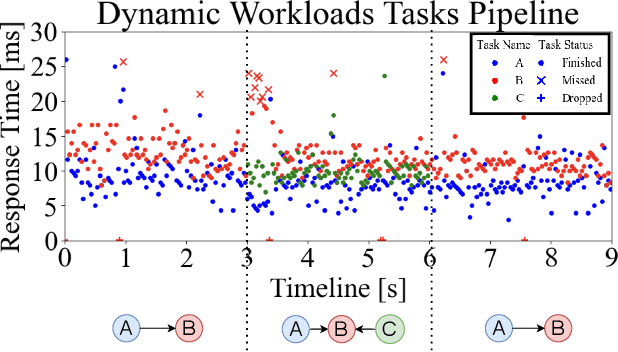

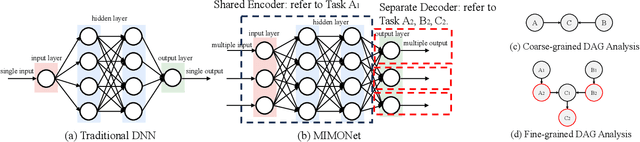
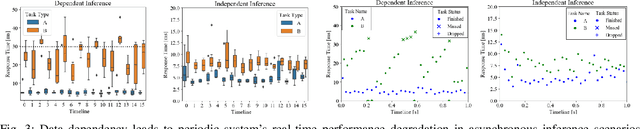
Intelligent robots are designed to effectively navigate dynamic and unpredictable environments laden with moving mechanical elements and objects. Such environment-induced dynamics, including moving obstacles, can readily alter the computational demand (e.g., the creation of new tasks) and the structure of workloads (e.g., precedence constraints among tasks) during runtime, thereby adversely affecting overall system performance. This challenge is amplified when multi-task inference is expected on robots operating under stringent resource and real-time constraints. To address such a challenge, we introduce RED, a systematic real-time scheduling approach designed to support multi-task deep neural network workloads in resource-limited robotic systems. It is designed to adaptively manage the Robotic Environmental Dynamics (RED) while adhering to real-time constraints. At the core of RED lies a deadline-based scheduler that employs an intermediate deadline assignment policy, effectively managing to change workloads and asynchronous inference prompted by complex, unpredictable environments. This scheduling framework also facilitates the flexible deployment of MIMONet (multi-input multi-output neural networks), which are commonly utilized in multi-tasking robotic systems to circumvent memory bottlenecks. Building on this scheduling framework, RED recognizes and leverages a unique characteristic of MIMONet: its weight-shared architecture. To further accommodate and exploit this feature, RED devises a novel and effective workload refinement and reconstruction process. This process ensures the scheduling framework's compatibility with MIMONet and maximizes efficiency.
Minimalist Traffic Prediction: Linear Layer Is All You Need
Aug 23, 2023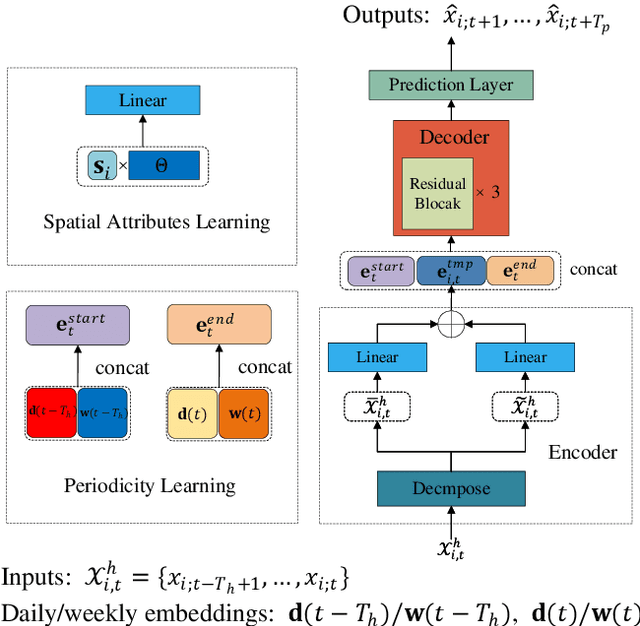
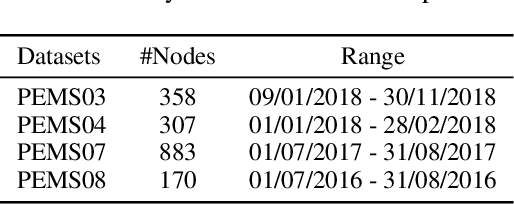
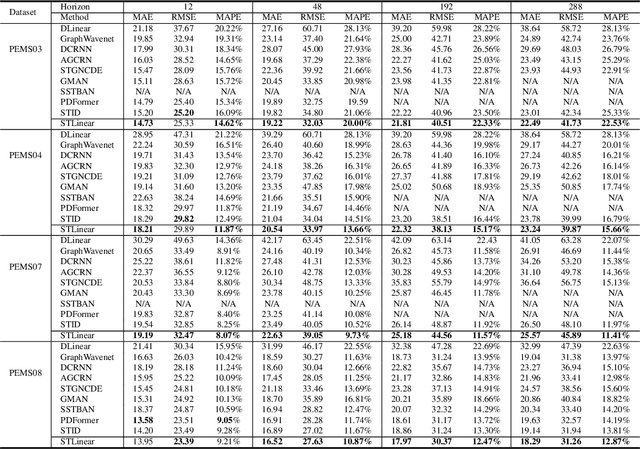
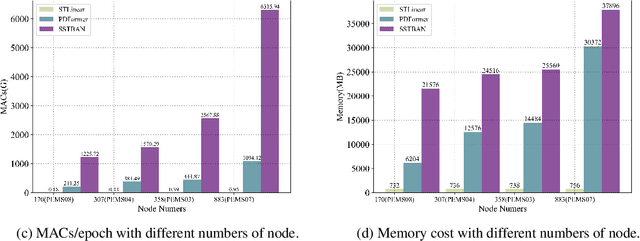
Traffic prediction is essential for the progression of Intelligent Transportation Systems (ITS) and the vision of smart cities. While Spatial-Temporal Graph Neural Networks (STGNNs) have shown promise in this domain by leveraging Graph Neural Networks (GNNs) integrated with either RNNs or Transformers, they present challenges such as computational complexity, gradient issues, and resource-intensiveness. This paper addresses these challenges, advocating for three main solutions: a node-embedding approach, time series decomposition, and periodicity learning. We introduce STLinear, a minimalist model architecture designed for optimized efficiency and performance. Unlike traditional STGNNs, STlinear operates fully locally, avoiding inter-node data exchanges, and relies exclusively on linear layers, drastically cutting computational demands. Our empirical studies on real-world datasets confirm STLinear's prowess, matching or exceeding the accuracy of leading STGNNs, but with significantly reduced complexity and computation overhead (more than 95% reduction in MACs per epoch compared to state-of-the-art STGNN baseline published in 2023). In summary, STLinear emerges as a potent, efficient alternative to conventional STGNNs, with profound implications for the future of ITS and smart city initiatives.
MIMONet: Multi-Input Multi-Output On-Device Deep Learning
Jul 22, 2023

Future intelligent robots are expected to process multiple inputs simultaneously (such as image and audio data) and generate multiple outputs accordingly (such as gender and emotion), similar to humans. Recent research has shown that multi-input single-output (MISO) deep neural networks (DNN) outperform traditional single-input single-output (SISO) models, representing a significant step towards this goal. In this paper, we propose MIMONet, a novel on-device multi-input multi-output (MIMO) DNN framework that achieves high accuracy and on-device efficiency in terms of critical performance metrics such as latency, energy, and memory usage. Leveraging existing SISO model compression techniques, MIMONet develops a new deep-compression method that is specifically tailored to MIMO models. This new method explores unique yet non-trivial properties of the MIMO model, resulting in boosted accuracy and on-device efficiency. Extensive experiments on three embedded platforms commonly used in robotic systems, as well as a case study using the TurtleBot3 robot, demonstrate that MIMONet achieves higher accuracy and superior on-device efficiency compared to state-of-the-art SISO and MISO models, as well as a baseline MIMO model we constructed. Our evaluation highlights the real-world applicability of MIMONet and its potential to significantly enhance the performance of intelligent robotic systems.
Localised Adaptive Spatial-Temporal Graph Neural Network
Jun 15, 2023

Spatial-temporal graph models are prevailing for abstracting and modelling spatial and temporal dependencies. In this work, we ask the following question: whether and to what extent can we localise spatial-temporal graph models? We limit our scope to adaptive spatial-temporal graph neural networks (ASTGNNs), the state-of-the-art model architecture. Our approach to localisation involves sparsifying the spatial graph adjacency matrices. To this end, we propose Adaptive Graph Sparsification (AGS), a graph sparsification algorithm which successfully enables the localisation of ASTGNNs to an extreme extent (fully localisation). We apply AGS to two distinct ASTGNN architectures and nine spatial-temporal datasets. Intriguingly, we observe that spatial graphs in ASTGNNs can be sparsified by over 99.5\% without any decline in test accuracy. Furthermore, even when ASTGNNs are fully localised, becoming graph-less and purely temporal, we record no drop in accuracy for the majority of tested datasets, with only minor accuracy deterioration observed in the remaining datasets. However, when the partially or fully localised ASTGNNs are reinitialised and retrained on the same data, there is a considerable and consistent drop in accuracy. Based on these observations, we reckon that \textit{(i)} in the tested data, the information provided by the spatial dependencies is primarily included in the information provided by the temporal dependencies and, thus, can be essentially ignored for inference; and \textit{(ii)} although the spatial dependencies provide redundant information, it is vital for the effective training of ASTGNNs and thus cannot be ignored during training. Furthermore, the localisation of ASTGNNs holds the potential to reduce the heavy computation overhead required on large-scale spatial-temporal data and further enable the distributed deployment of ASTGNNs.
Representing Input Transformations by Low-Dimensional Parameter Subspaces
May 22, 2023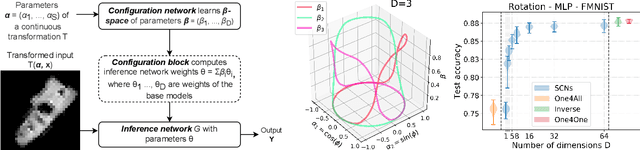
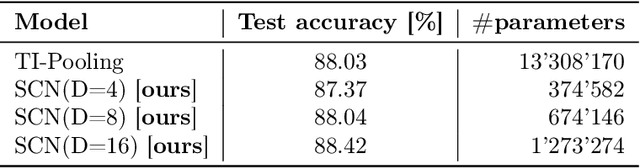
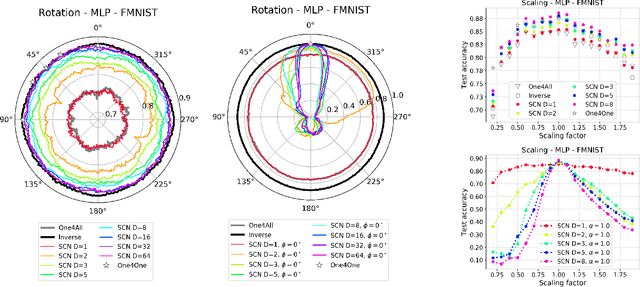
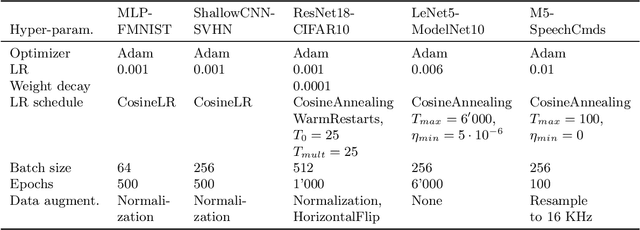
Deep models lack robustness to simple input transformations such as rotation, scaling, and translation, unless they feature a particular invariant architecture or undergo specific training, e.g., learning the desired robustness from data augmentations. Alternatively, input transformations can be treated as a domain shift problem, and solved by post-deployment model adaptation. Although a large number of methods deal with transformed inputs, the fundamental relation between input transformations and optimal model weights is unknown. In this paper, we put forward the configuration subspace hypothesis that model weights optimal for parameterized continuous transformations can reside in low-dimensional linear subspaces. We introduce subspace-configurable networks to learn these subspaces and observe their structure and surprisingly low dimensionality on all tested transformations, datasets and architectures from computer vision and audio signal processing domains. Our findings enable efficient model reconfiguration, especially when limited storage and computing resources are at stake.
Hyper Attention Recurrent Neural Network: Tackling Temporal Covariate Shift in Time Series Analysis
Feb 22, 2022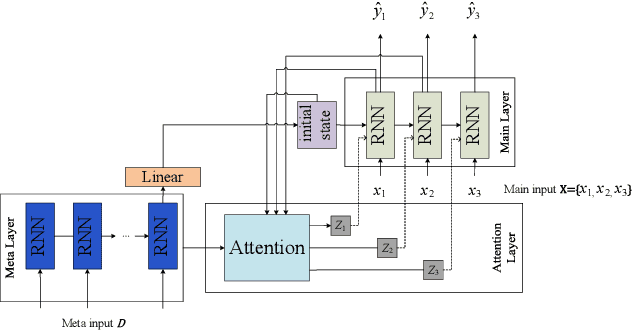
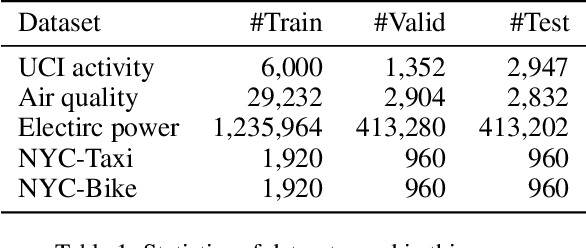
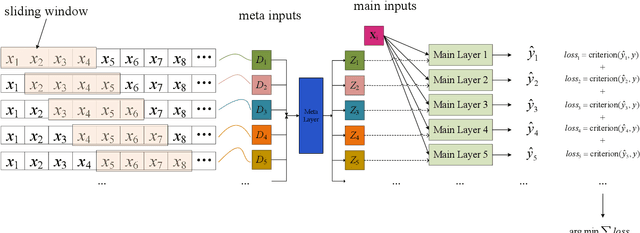
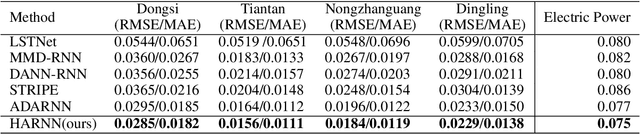
Analyzing long time series with RNNs often suffers from infeasible training. Segmentation is therefore commonly used in data pre-processing. However, in non-stationary time series, there exists often distribution shift among different segments. RNN is easily swamped in the dilemma of fitting bias in these segments due to the lack of global information, leading to poor generalization, known as Temporal Covariate Shift (TCS) problem, which is only addressed by a recently proposed RNN-based model. One of the assumptions in TCS is that the distribution of all divided intervals under the same segment are identical. This assumption, however, may not be true on high-frequency time series, such as traffic flow, that also have large stochasticity. Besides, macro information across long periods isn't adequately considered in the latest RNN-based methods. To address the above issues, we propose Hyper Attention Recurrent Neural Network (HARNN) for the modeling of temporal patterns containing both micro and macro information. An HARNN consists of a meta layer for parameter generation and an attention-enabled main layer for inference. High-frequency segments are transformed into low-frequency segments and fed into the meta layers, while the first main layer consumes the same high-frequency segments as conventional methods. In this way, each low-frequency segment in the meta inputs generates a unique main layer, enabling the integration of both macro information and micro information for inference. This forces all main layers to predict the same target which fully harnesses the common knowledge in varied distributions when capturing temporal patterns. Evaluations on multiple benchmarks demonstrated that our model outperforms a couple of RNN-based methods on a federation of key metrics.
Disentangling Redundancy for Multi-Task Pruning
May 23, 2019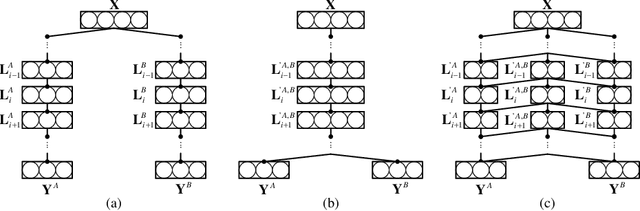
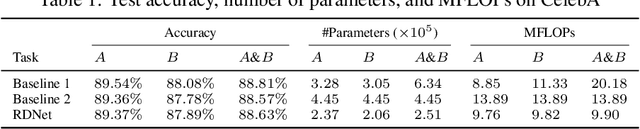
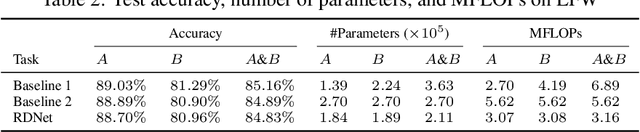
Can prior network pruning strategies eliminate redundancy in multiple correlated pre-trained deep neural networks? It seems a positive answer if multiple networks are first combined and then pruned. However, we argue that an arbitrarily combined network may lead to sub-optimal pruning performance because their intra- and inter-redundancy may not be minimised at the same time while retaining the inference accuracy in each task. In this paper, we define and analyse the redundancy in multi-task networks from an information theoretic perspective, and identify challenges for existing pruning methods to function effectively for multi-task pruning. We propose Redundancy-Disentangled Networks (RDNets), which decouples intra- and inter-redundancy such that all redundancy can be suppressed via previous network pruning schemes. A pruned RDNet also ensures minimal computation in any subset of tasks, a desirable feature for selective task execution. Moreover, a heuristic is devised to construct an RDNet from multiple pre-trained networks. Experiments on CelebA show that the same pruning method on an RDNet achieves at least 1:8x lower memory usage and 1:4x lower computation cost than on a multi-task network constructed by the state-of-the-art network merging scheme.