 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrincipled Approaches for Extending Neural Architectures to Function Spaces for Operator Learning
Jun 12, 2025A wide range of scientific problems, such as those described by continuous-time dynamical systems and partial differential equations (PDEs), are naturally formulated on function spaces. While function spaces are typically infinite-dimensional, deep learning has predominantly advanced through applications in computer vision and natural language processing that focus on mappings between finite-dimensional spaces. Such fundamental disparities in the nature of the data have limited neural networks from achieving a comparable level of success in scientific applications as seen in other fields. Neural operators are a principled way to generalize neural networks to mappings between function spaces, offering a pathway to replicate deep learning's transformative impact on scientific problems. For instance, neural operators can learn solution operators for entire classes of PDEs, e.g., physical systems with different boundary conditions, coefficient functions, and geometries. A key factor in deep learning's success has been the careful engineering of neural architectures through extensive empirical testing. Translating these neural architectures into neural operators allows operator learning to enjoy these same empirical optimizations. However, prior neural operator architectures have often been introduced as standalone models, not directly derived as extensions of existing neural network architectures. In this paper, we identify and distill the key principles for constructing practical implementations of mappings between infinite-dimensional function spaces. Using these principles, we propose a recipe for converting several popular neural architectures into neural operators with minimal modifications. This paper aims to guide practitioners through this process and details the steps to make neural operators work in practice. Our code can be found at https://github.com/neuraloperator/NNs-to-NOs
NOBLE -- Neural Operator with Biologically-informed Latent Embeddings to Capture Experimental Variability in Biological Neuron Models
Jun 05, 2025Characterizing the diverse computational properties of human neurons via multimodal electrophysiological, transcriptomic, and morphological data provides the foundation for constructing and validating bio-realistic neuron models that can advance our understanding of fundamental mechanisms underlying brain function. However, current modeling approaches remain constrained by the limited availability and intrinsic variability of experimental neuronal data. To capture variability, ensembles of deterministic models are often used, but are difficult to scale as model generation requires repeating computationally expensive optimization for each neuron. While deep learning is becoming increasingly relevant in this space, it fails to capture the full biophysical complexity of neurons, their nonlinear voltage dynamics, and variability. To address these shortcomings, we introduce NOBLE, a neural operator framework that learns a mapping from a continuous frequency-modulated embedding of interpretable neuron features to the somatic voltage response induced by current injection. Trained on data generated from biophysically realistic neuron models, NOBLE predicts distributions of neural dynamics accounting for the intrinsic experimental variability. Unlike conventional bio-realistic neuron models, interpolating within the embedding space offers models whose dynamics are consistent with experimentally observed responses. NOBLE is the first scaled-up deep learning framework validated on real experimental data, enabling efficient generation of synthetic neurons that exhibit trial-to-trial variability and achieve a $4200\times$ speedup over numerical solvers. To this end, NOBLE captures fundamental neural properties, opening the door to a better understanding of cellular composition and computations, neuromorphic architectures, large-scale brain circuits, and general neuroAI applications.
Enabling Automatic Differentiation with Mollified Graph Neural Operators
Apr 11, 2025Physics-informed neural operators offer a powerful framework for learning solution operators of partial differential equations (PDEs) by combining data and physics losses. However, these physics losses rely on derivatives. Computing these derivatives remains challenging, with spectral and finite difference methods introducing approximation errors due to finite resolution. Here, we propose the mollified graph neural operator (mGNO), the first method to leverage automatic differentiation and compute \emph{exact} gradients on arbitrary geometries. This enhancement enables efficient training on irregular grids and varying geometries while allowing seamless evaluation of physics losses at randomly sampled points for improved generalization. For a PDE example on regular grids, mGNO paired with autograd reduced the L2 relative data error by 20x compared to finite differences, although training was slower. It can also solve PDEs on unstructured point clouds seamlessly, using physics losses only, at resolutions vastly lower than those needed for finite differences to be accurate enough. On these unstructured point clouds, mGNO leads to errors that are consistently 2 orders of magnitude lower than machine learning baselines (Meta-PDE) for comparable runtimes, and also delivers speedups from 1 to 3 orders of magnitude compared to the numerical solver for similar accuracy. mGNOs can also be used to solve inverse design and shape optimization problems on complex geometries.
Projected Neural Differential Equations for Learning Constrained Dynamics
Oct 31, 2024



Neural differential equations offer a powerful approach for learning dynamics from data. However, they do not impose known constraints that should be obeyed by the learned model. It is well-known that enforcing constraints in surrogate models can enhance their generalizability and numerical stability. In this paper, we introduce projected neural differential equations (PNDEs), a new method for constraining neural differential equations based on projection of the learned vector field to the tangent space of the constraint manifold. In tests on several challenging examples, including chaotic dynamical systems and state-of-the-art power grid models, PNDEs outperform existing methods while requiring fewer hyperparameters. The proposed approach demonstrates significant potential for enhancing the modeling of constrained dynamical systems, particularly in complex domains where accuracy and reliability are essential.
An Operator Learning Framework for Spatiotemporal Super-resolution of Scientific Simulations
Nov 04, 2023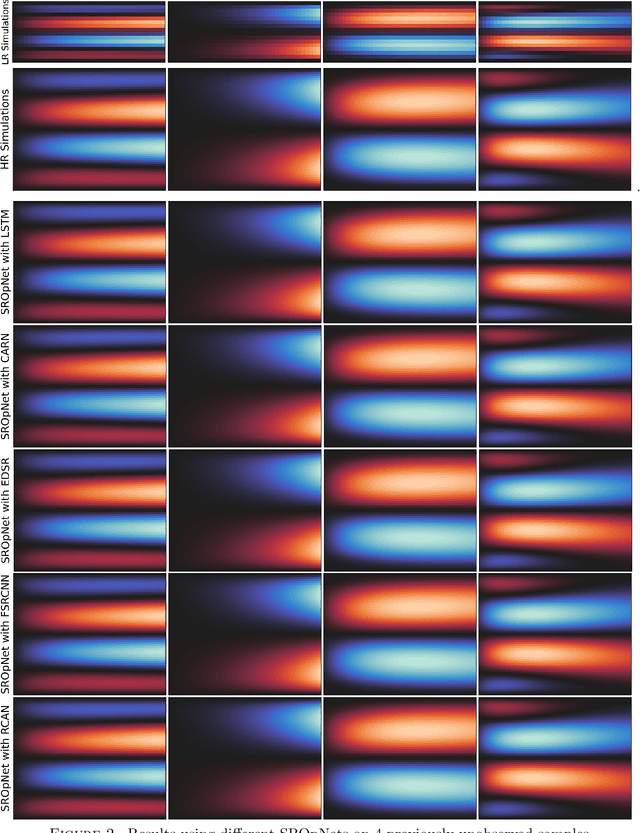
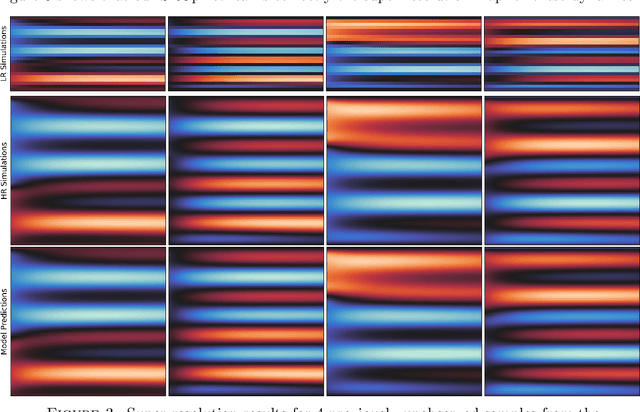
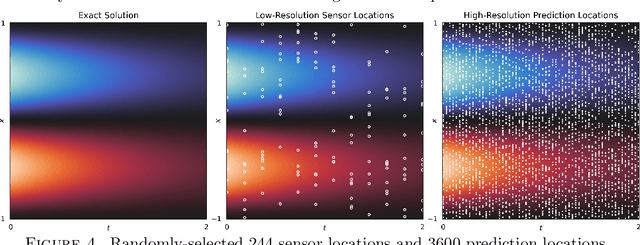
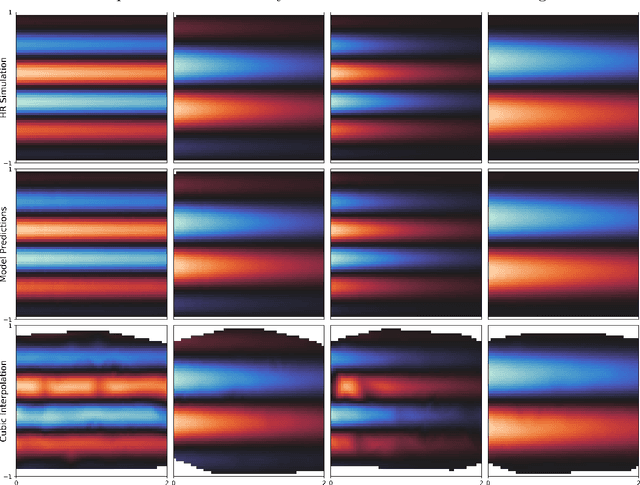
In numerous contexts, high-resolution solutions to partial differential equations are required to capture faithfully essential dynamics which occur at small spatiotemporal scales, but these solutions can be very difficult and slow to obtain using traditional methods due to limited computational resources. A recent direction to circumvent these computational limitations is to use machine learning techniques for super-resolution, to reconstruct high-resolution numerical solutions from low-resolution simulations which can be obtained more efficiently. The proposed approach, the Super Resolution Operator Network (SROpNet), frames super-resolution as an operator learning problem and draws inspiration from existing architectures to learn continuous representations of solutions to parametric differential equations from low-resolution approximations, which can then be evaluated at any desired location. In addition, no restrictions are imposed on the locations of (the fixed number of) spatiotemporal sensors at which the low-resolution approximations are provided, thereby enabling the consideration of a broader spectrum of problems arising in practice, for which many existing super-resolution approaches are not well-suited.
Simplifying Momentum-based Riemannian Submanifold Optimization
Feb 20, 2023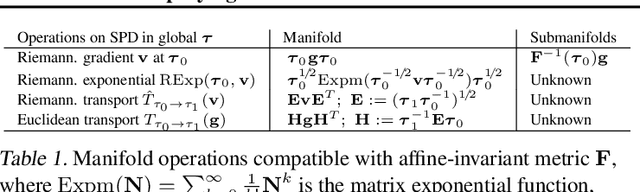
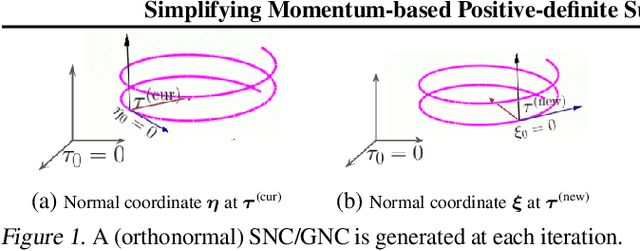
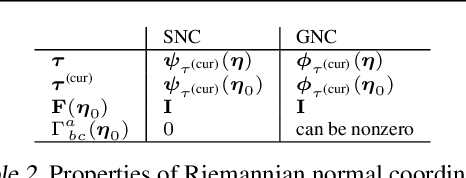
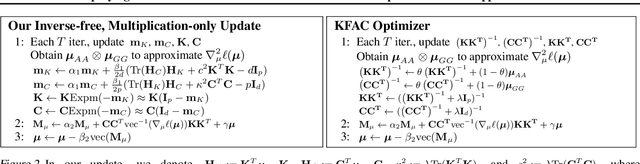
Riemannian submanifold optimization with momentum is computationally challenging because ensuring iterates remain on the submanifold often requires solving difficult differential equations. We simplify such optimization algorithms for the submanifold of symmetric positive-definite matrices with the affine invariant metric. We propose a generalized version of the Riemannian normal coordinates which dynamically trivializes the problem into a Euclidean unconstrained problem. We use our approach to explain and simplify existing approaches for structured covariances and develop efficient second-order optimizers for deep learning without explicit matrix inverses.
Lie Group Forced Variational Integrator Networks for Learning and Control of Robot Systems
Dec 21, 2022


Incorporating prior knowledge of physics laws and structural properties of dynamical systems into the design of deep learning architectures has proven to be a powerful technique for improving their computational efficiency and generalization capacity. Learning accurate models of robot dynamics is critical for safe and stable control. Autonomous mobile robots, including wheeled, aerial, and underwater vehicles, can be modeled as controlled Lagrangian or Hamiltonian rigid-body systems evolving on matrix Lie groups. In this paper, we introduce a new structure-preserving deep learning architecture, the Lie group Forced Variational Integrator Network (LieFVIN), capable of learning controlled Lagrangian or Hamiltonian dynamics on Lie groups, either from position-velocity or position-only data. By design, LieFVINs preserve both the Lie group structure on which the dynamics evolve and the symplectic structure underlying the Hamiltonian or Lagrangian systems of interest. The proposed architecture learns surrogate discrete-time flow maps allowing accurate and fast prediction without numerical-integrator, neural-ODE, or adjoint techniques, which are needed for vector fields. Furthermore, the learnt discrete-time dynamics can be utilized with computationally scalable discrete-time (optimal) control strategies.
Approximation of nearly-periodic symplectic maps via structure-preserving neural networks
Oct 11, 2022
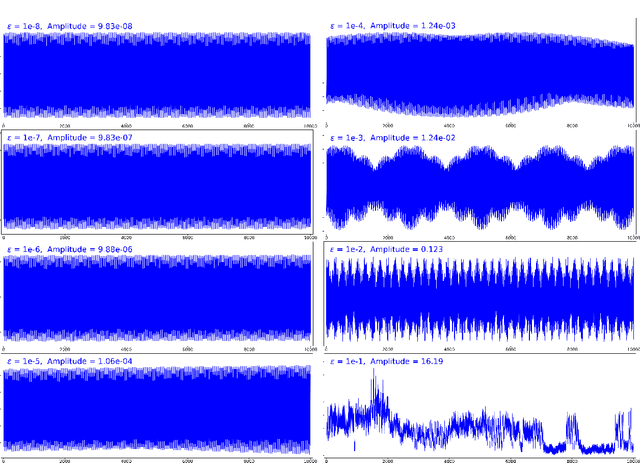

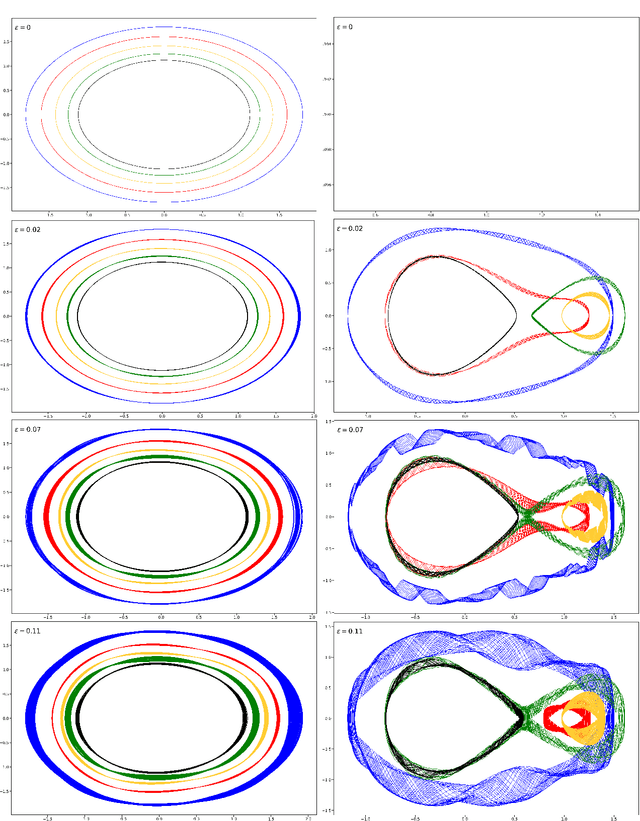
A continuous-time dynamical system with parameter $\varepsilon$ is nearly-periodic if all its trajectories are periodic with nowhere-vanishing angular frequency as $\varepsilon$ approaches 0. Nearly-periodic maps are discrete-time analogues of nearly-periodic systems, defined as parameter-dependent diffeomorphisms that limit to rotations along a circle action, and they admit formal $U(1)$ symmetries to all orders when the limiting rotation is non-resonant. For Hamiltonian nearly-periodic maps on exact presymplectic manifolds, the formal $U(1)$ symmetry gives rise to a discrete-time adiabatic invariant. In this paper, we construct a novel structure-preserving neural network to approximate nearly-periodic symplectic maps. This neural network architecture, which we call symplectic gyroceptron, ensures that the resulting surrogate map is nearly-periodic and symplectic, and that it gives rise to a discrete-time adiabatic invariant and a long-time stability. This new structure-preserving neural network provides a promising architecture for surrogate modeling of non-dissipative dynamical systems that automatically steps over short timescales without introducing spurious instabilities.