 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegularized Linear Discriminant Analysis Using a Nonlinear Covariance Matrix Estimator
Feb 07, 2024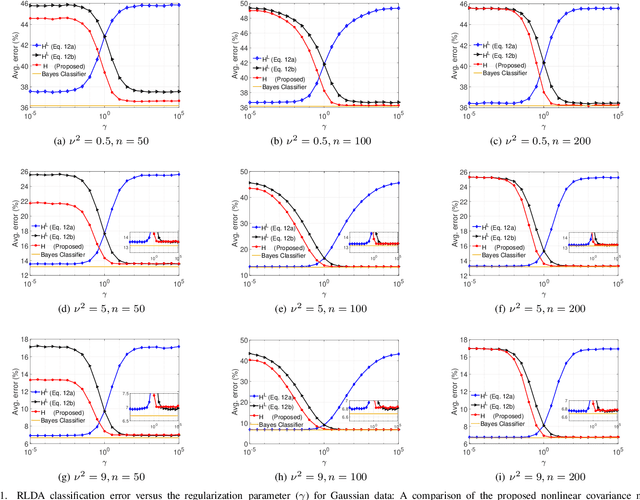
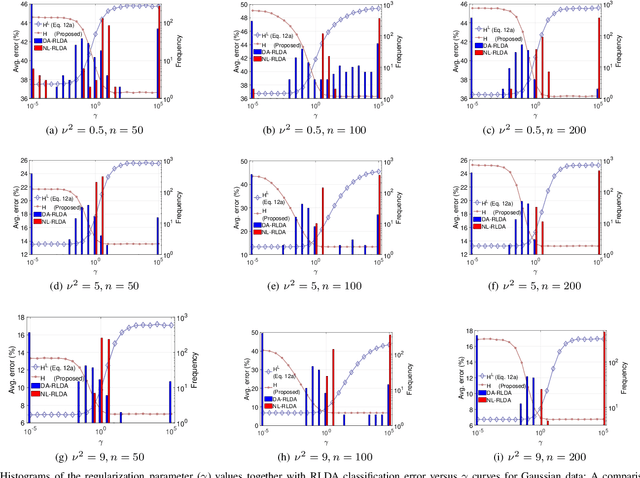
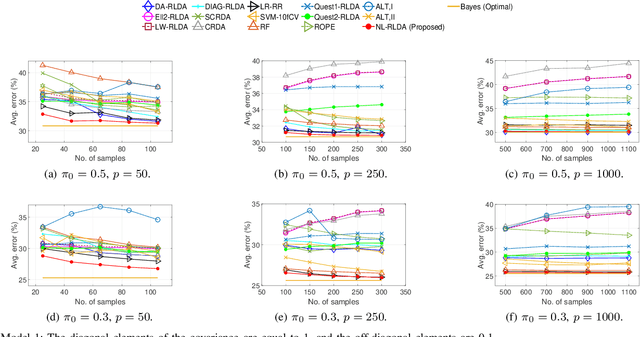
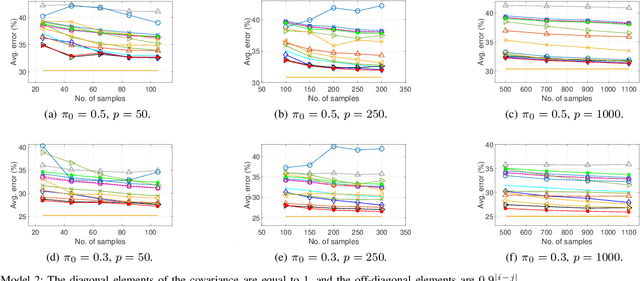
Linear discriminant analysis (LDA) is a widely used technique for data classification. The method offers adequate performance in many classification problems, but it becomes inefficient when the data covariance matrix is ill-conditioned. This often occurs when the feature space's dimensionality is higher than or comparable to the training data size. Regularized LDA (RLDA) methods based on regularized linear estimators of the data covariance matrix have been proposed to cope with such a situation. The performance of RLDA methods is well studied, with optimal regularization schemes already proposed. In this paper, we investigate the capability of a positive semidefinite ridge-type estimator of the inverse covariance matrix that coincides with a nonlinear (NL) covariance matrix estimator. The estimator is derived by reformulating the score function of the optimal classifier utilizing linear estimation methods, which eventually results in the proposed NL-RLDA classifier. We derive asymptotic and consistent estimators of the proposed technique's misclassification rate under the assumptions of a double-asymptotic regime and multivariate Gaussian model for the classes. The consistent estimator, coupled with a one-dimensional grid search, is used to set the value of the regularization parameter required for the proposed NL-RLDA classifier. Performance evaluations based on both synthetic and real data demonstrate the effectiveness of the proposed classifier. The proposed technique outperforms state-of-art methods over multiple datasets. When compared to state-of-the-art methods across various datasets, the proposed technique exhibits superior performance.
Beamforming Design and Performance Evaluation for RIS-aided Localization using LEO Satellite Signals
Sep 13, 2023


The growing availability of low-Earth orbit (LEO) satellites, coupled with the anticipated widespread deployment of reconfigurable intelligent surfaces (RISs), opens up promising prospects for new localization paradigms. This paper studies RIS-aided localization using LEO satellite signals. The Cram\'er-Rao bound of the considered localization problem is derived, based on which an optimal RIS beamforming design that minimizes the derived bound is proposed. Numerical results demonstrate the superiority of the proposed beamforming scheme over benchmark alternatives, while also revealing that the synergy between LEO satellites and RISs holds the promise of achieving localization accuracy at the meter or even sub-meter level.
Attitude Determination in Urban Canyons: A Synergy between GNSS and 5G Observations
Aug 22, 2023This paper considers the attitude determination problem based on the global navigation satellite system (GNSS) and fifth-generation (5G) measurement fusion to address the shortcomings of standalone GNSS and 5G techniques in deep urban regions. The tight fusion of the GNSS and the 5G observations results in a unique hybrid integer- and orthonormality-constrained optimization problem. To solve this problem, we propose an estimation method consisting of the steps of float solution computation, ambiguity resolution, and fixed solution computation. Numerical results reveal that the proposed method can effectively improve the attitude determination accuracy and reliability compared to either the pure GNSS solution or the pure 5G solution.
JrCUP: Joint RIS Calibration and User Positioning for 6G Wireless Systems
Apr 02, 2023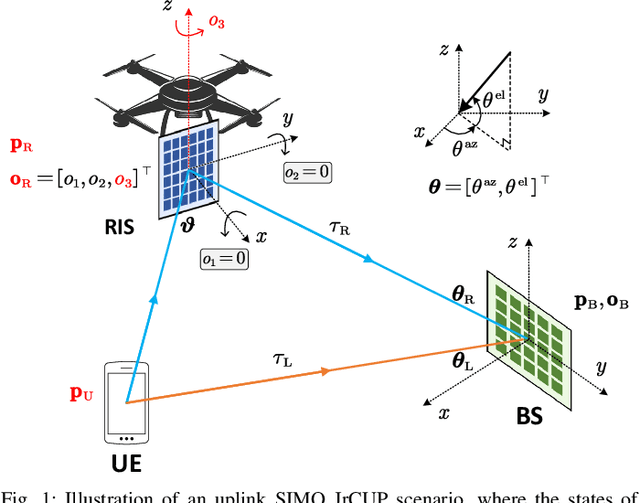
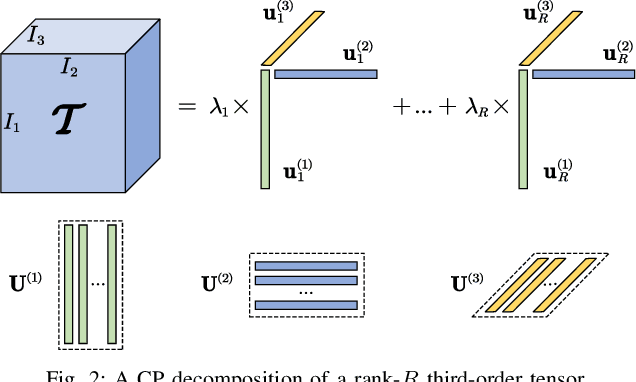
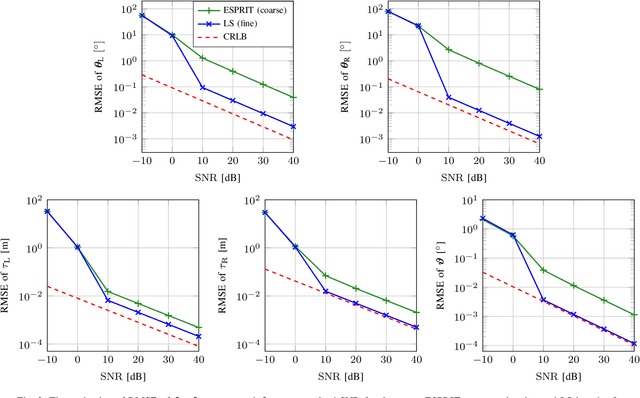
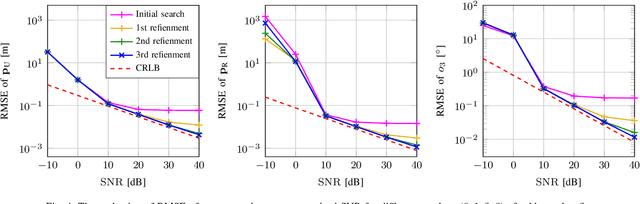
Reconfigurable intelligent surface (RIS)-assisted localization has attracted extensive attention as it can enable and enhance localization services in extreme scenarios. However, most existing works treat RISs as anchors with known positions and orientations, which is not realistic in the applications for mobile RISs or uncalibrated RISs. This work considers the joint RIS calibration and user positioning (JrCUP) problem in an uplink system with an active RIS. We propose a novel two-stage method to solve the considered JrCUP problem. The first stage comprises a tensor-ESPRIT estimator, followed by channel parameters refinement using least-squares. In the second stage, we propose a 2D search-based algorithm to estimate the 3D user position, 3D RIS position, 1D RIS orientation, and clock bias from the estimated channel parameters. The Cram\'er- Rao lower bounds (CRLBs) of the channel parameters and localization parameters are derived, which verify the effectiveness of the proposed algorithms. In addition, simulation studies reveal that the active RIS can significantly improve the localization performance compared to the passive case even with a small power supply. Moreover, we find that blind areas may occur where JrCUP localization performance is limited, which can be mitigated by either providing extra prior information or deploying more base stations.
5G-Aided RTK Positioning in GNSS-Deprived Environments
Mar 23, 2023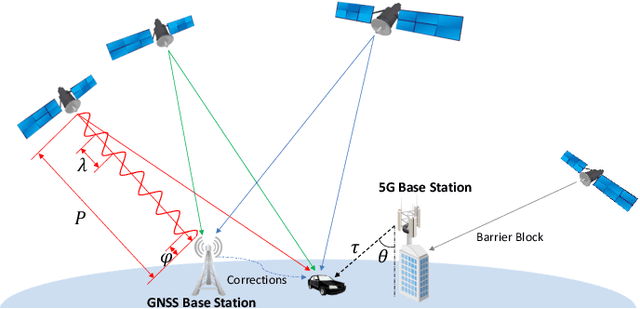
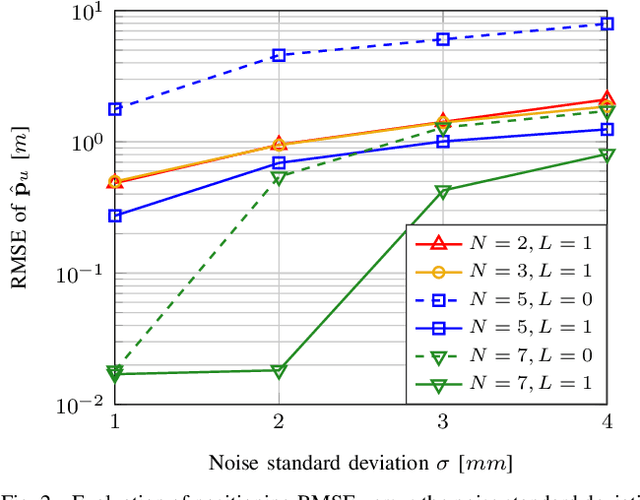
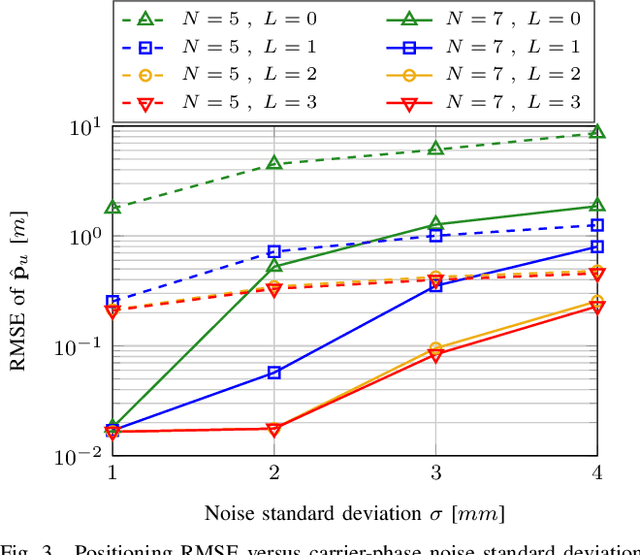
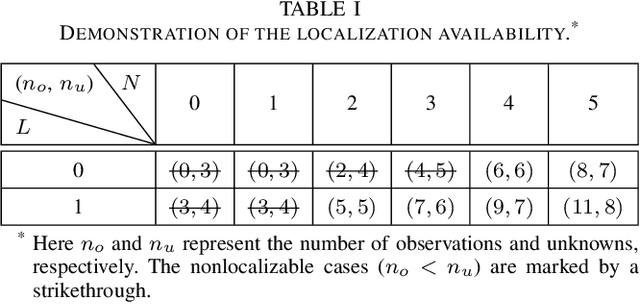
This paper considers the localization problem in a 5G-aided global navigation satellite system (GNSS) based on real-time kinematic (RTK) technique. Specifically, the user's position is estimated based on the hybrid measurements, including GNSS pseudo-ranges, GNSS carrier phases, 5G angle-of-departures, and 5G channel delays. The underlying estimation problem is solved by steps that comprise obtaining the float solution, ambiguity resolution, and resolving the fixed solution. The analysis results show that the involvement of 5G observations can enable localization under satellite-deprived environments, inclusive of extreme cases with only 2 or 3 visible satellites. Moreover, extensive simulation results reveal that with the help of 5G observations, the proposed algorithm can significantly reduce the estimation error of the user's position and increase the success rate of carrier-phase ambiguity resolution.
Misspecified Cramér-Rao Bound of RIS-aided Localization under Geometry Mismatch
Nov 13, 2022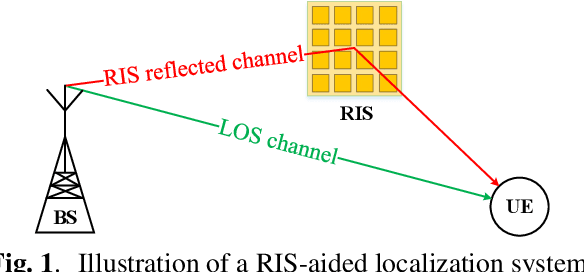
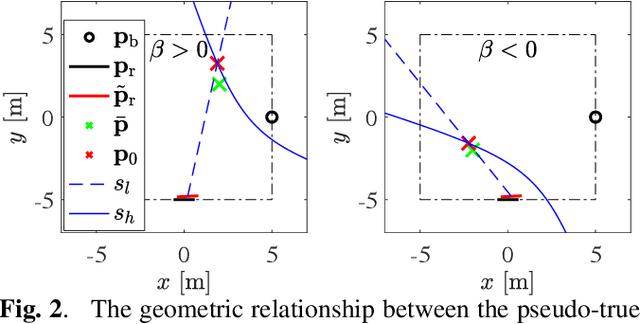
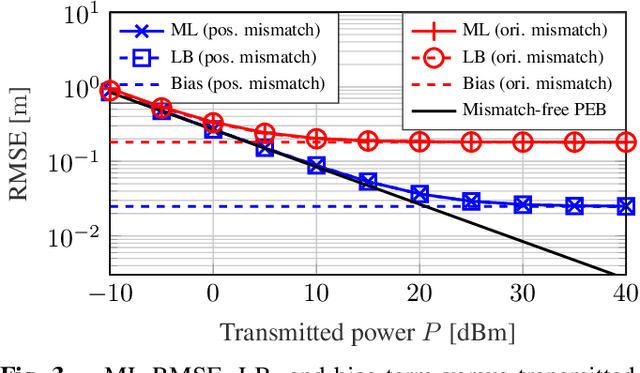
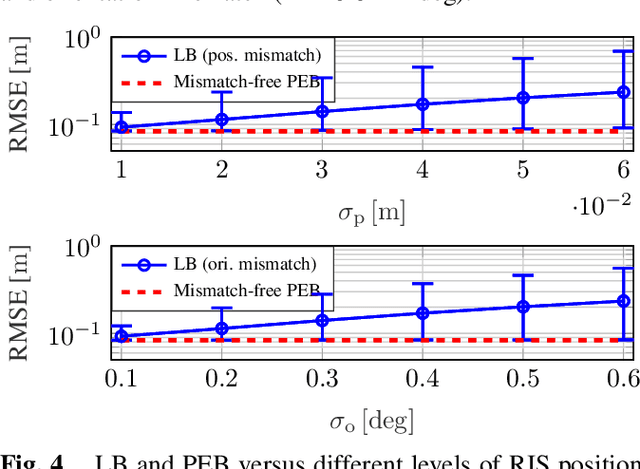
In 5G/6G wireless systems, reconfigurable intelligent surfaces (RIS) can play a role as a passive anchor to enable and enhance localization in various scenarios. However, most existing RIS-aided localization works assume that the geometry of the RIS is perfectly known, which is not realistic in practice due to calibration errors. In this work, we derive the misspecified Cram\'er-Rao bound (MCRB) for a single-input-single-output RIS-aided localization system with RIS geometry mismatch. Specifically, unlike most existing works that use numerical methods, we propose a closed-form solution to the pseudo-true parameter determination problem for MCRB analysis. Simulation results demonstrate the validity of the derived pseudo-true parameters and MCRB, and show that the RIS geometry mismatch causes performance saturation in the high signal-to-noise ratio regions.
Localization Coverage Analysis of THz Communication Systems with a 3D Array
Sep 19, 2022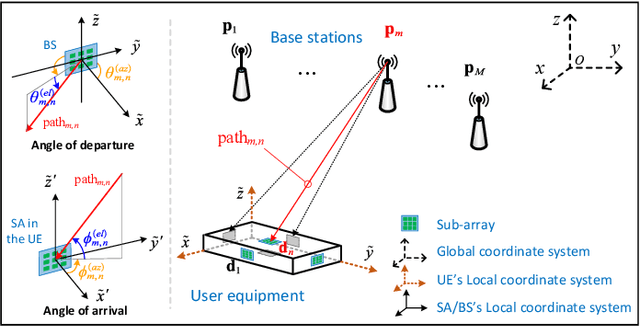
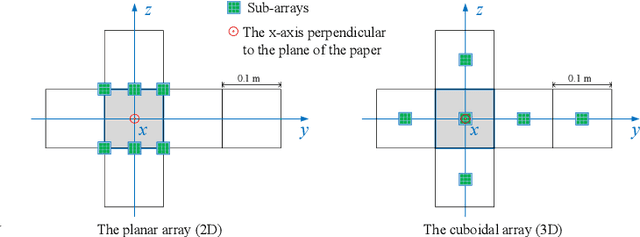
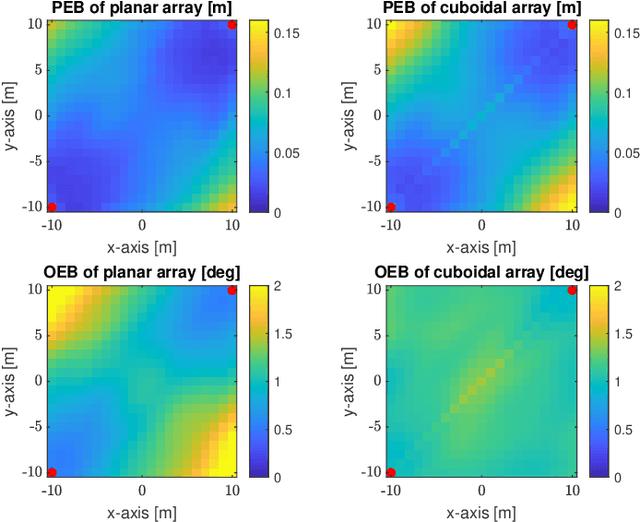
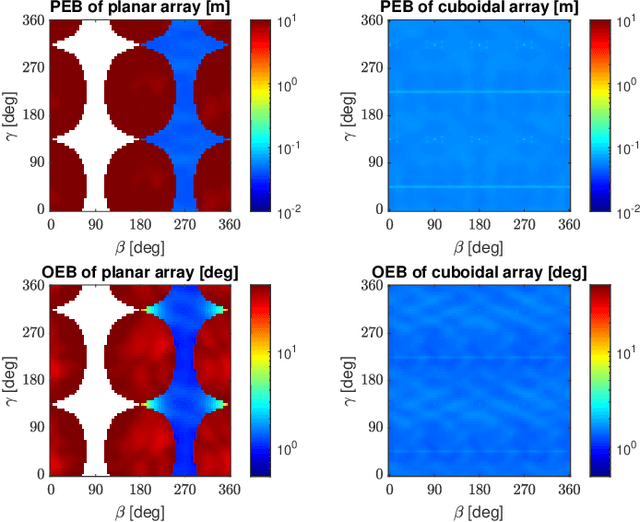
This paper considers the problem of estimating the position and orientation of a user equipped with a three-dimensional (3D) array receiving downlink far-field THz signals from multiple base stations with known positions and orientations. We derive the Cram\'er-Rao Bound for the localization problem and define the coverage of the considered system. We compare the error lower bound distributions of the conventional planar array and the 3D array configurations at different user equipment (UE) positions and orientations. Our numerical results obtained for array configurations with an equal number of elements show very limited coverage of the planar-array configuration, especially across the UE orientation range. Conversely, a 3D array configuration offers an overall higher coverage with minor performance loss in certain UE positions and orientations.
Sharp Analysis of RLS-based Digital Precoder with Limited PAPR in Massive MIMO
May 28, 2022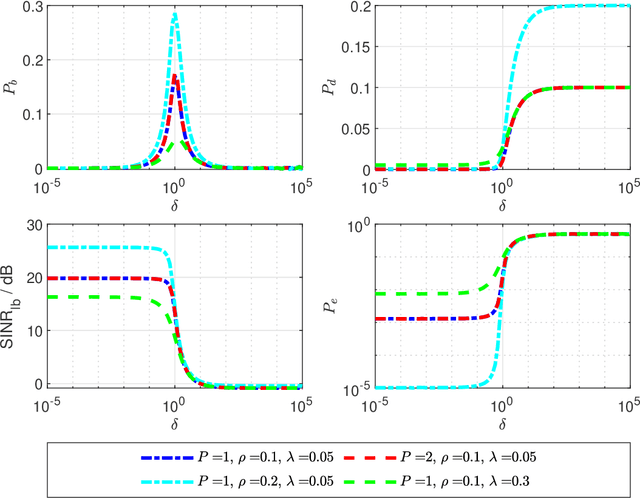
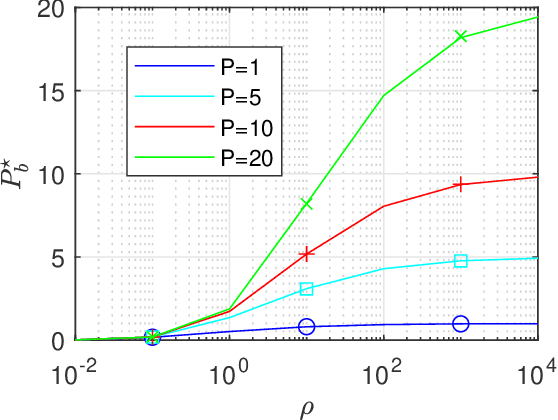
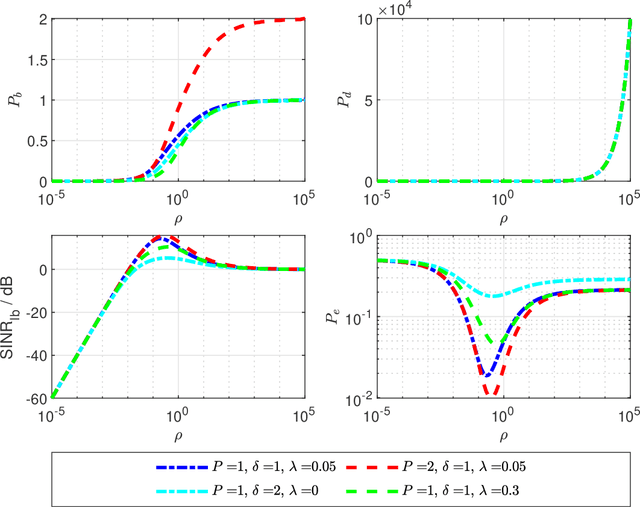
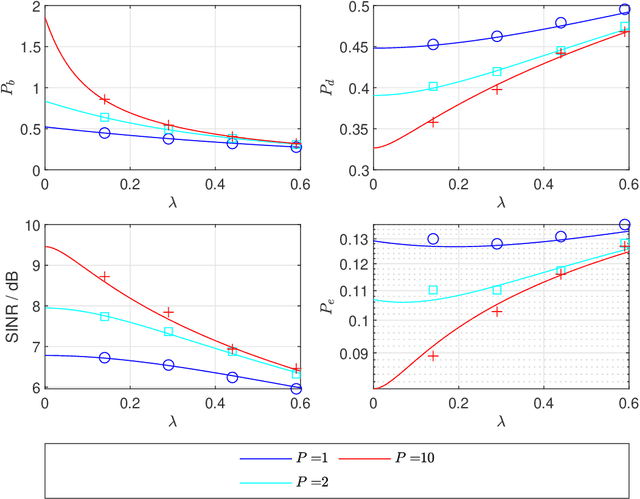
This paper focuses on the performance analysis of a class of limited peak-to-average power ratio (PAPR) precoders for downlink multi-user massive multiple-input multiple-output (MIMO) systems. Contrary to conventional precoding approaches based on simple linear precoders maximum ratio transmission (MRT) and regularized zero forcing (RZF), the precoders in this paper are obtained by solving a convex optimization problem. To be specific, for the precoders we analyze in this paper, the power of each precoded symbol entry is restricted, which allows them to present a reduced PAPR at each antenna. By using the Convex Gaussian Min-max Theorem (CGMT), we analytically characterize the empirical distribution of the precoded vector and the joint empirical distribution between the distortion and the intended symbol vector. This allows us to study the performance of these precoders in terms of per-antenna power, per-user distortion power, signal to interference and noise ratio, and bit error probability. We show that for this class of precoders, there is an optimal transmit power that maximizes the system performance.
Antenna Selection in Switch-Based MIMO Arrays via DOA threshold region Approximation
May 22, 2022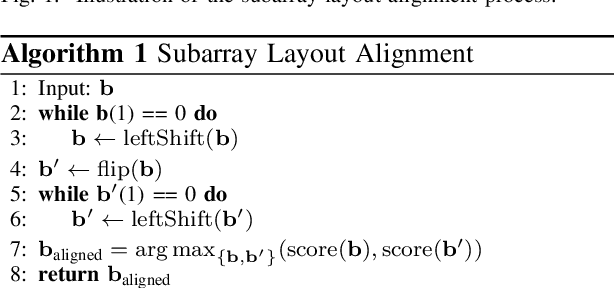
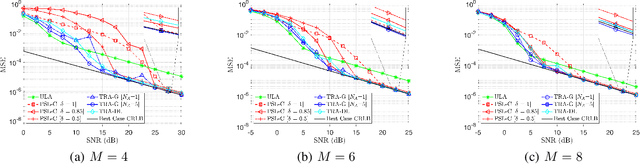
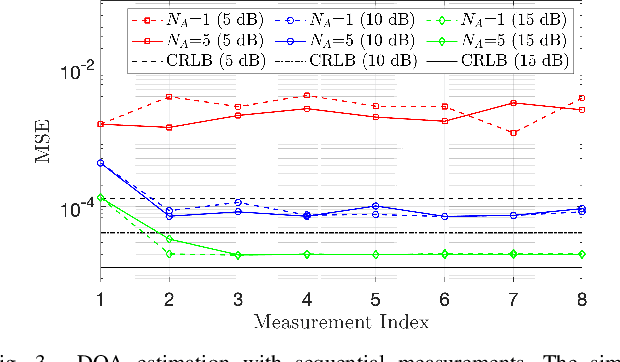
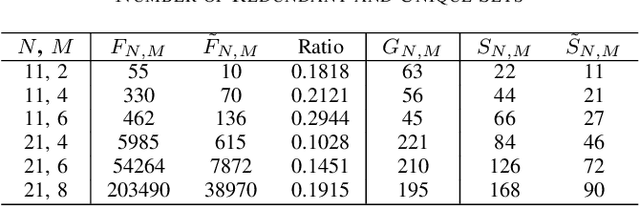
Direction-of-arrival (DOA) information is vital for multiple-input-multiple-output (MIMO) systems to complete localization and beamforming tasks. Switched antenna arrays have recently emerged as an effective solution to reduce the cost and power consumption of MIMO systems. Switch-based array architectures connect a limited number of radio frequency chains to a subset of the antenna elements forming a subarray. This paper addresses the problem of antenna selection to optimize DOA estimation performance. We first perform a subarray layout alignment process to remove subarrays with identical beampatterns and create a unique subarray set. By using this set, and based on a DOA threshold region performance approximation, we propose two antenna selection algorithms; a greedy algorithm and a deep-learning-based algorithm. The performance of the proposed algorithms is evaluated numerically. The results show a significant performance improvement over selected benchmark approaches in terms of DOA estimation in the threshold region and computational complexity.
Instantaneous GNSS Ambiguity Resolution and Attitude Determination via Riemannian Manifold Optimization
May 20, 2022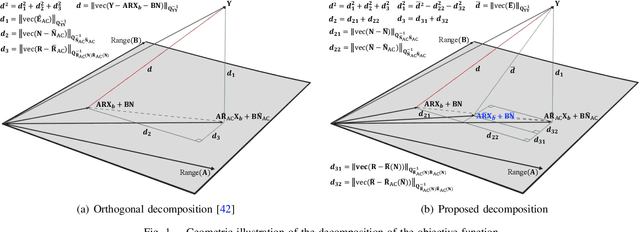
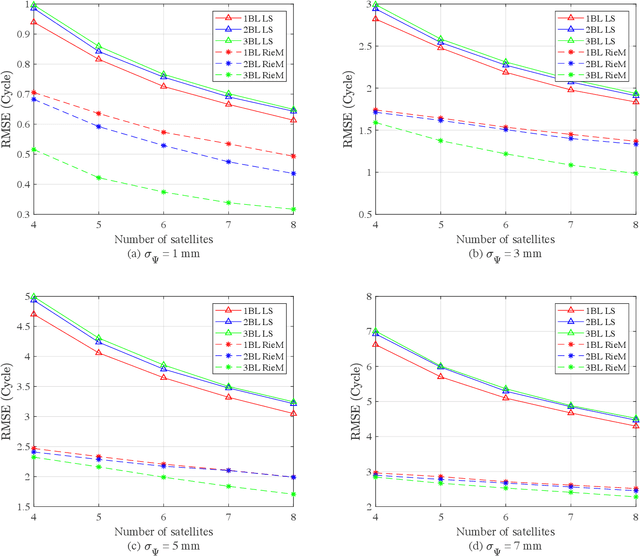
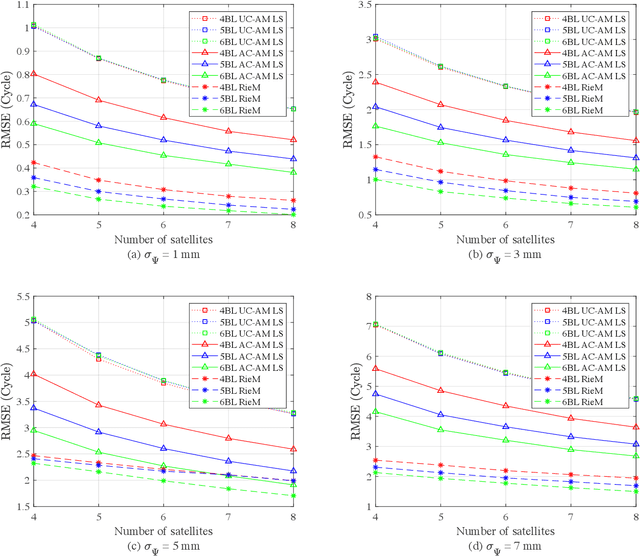

We present an ambiguity resolution method for Global Navigation Satellite System (GNSS)-based attitude determination. A GNSS attitude model with nonlinear constraints is used to rigorously incorporate a priori information. Given the characteristics of the employed nonlinear constraints, we formulate GNSS attitude determination as an optimization problem on a manifold. Then, Riemannian manifold optimization algorithms are utilized to aid ambiguity resolution based on a proposed decomposition of the objective function. The application of manifold geometry enables high-quality float solutions that are critical to reinforcing search-based integer ambiguity resolution in terms of efficiency, availability, and reliability. The proposed approach is characterized by a low computational complexity and a high probability of resolving the ambiguities correctly. The performance of the proposed ambiguity resolution method is tested through a series of simulations and real experiments. Comparisons with the principal benchmarks indicate the superiority of the proposed method as reflected by the high ambiguity resolution success rates.