 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJrCUP: Joint RIS Calibration and User Positioning for 6G Wireless Systems
Paper and Code
Apr 02, 2023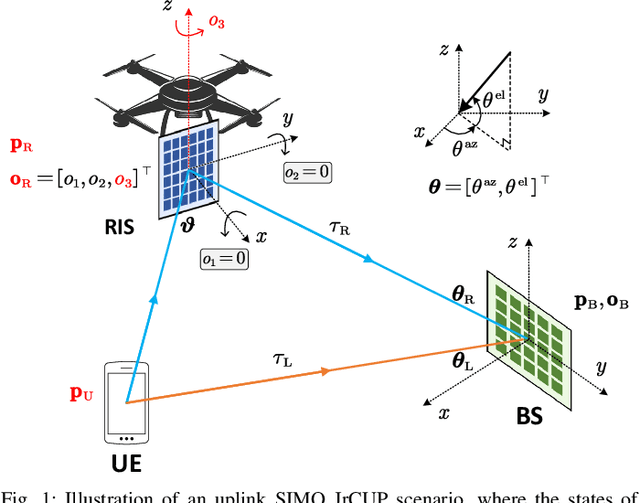
Reconfigurable intelligent surface (RIS)-assisted localization has attracted extensive attention as it can enable and enhance localization services in extreme scenarios. However, most existing works treat RISs as anchors with known positions and orientations, which is not realistic in the applications for mobile RISs or uncalibrated RISs. This work considers the joint RIS calibration and user positioning (JrCUP) problem in an uplink system with an active RIS. We propose a novel two-stage method to solve the considered JrCUP problem. The first stage comprises a tensor-ESPRIT estimator, followed by channel parameters refinement using least-squares. In the second stage, we propose a 2D search-based algorithm to estimate the 3D user position, 3D RIS position, 1D RIS orientation, and clock bias from the estimated channel parameters. The Cram\'er- Rao lower bounds (CRLBs) of the channel parameters and localization parameters are derived, which verify the effectiveness of the proposed algorithms. In addition, simulation studies reveal that the active RIS can significantly improve the localization performance compared to the passive case even with a small power supply. Moreover, we find that blind areas may occur where JrCUP localization performance is limited, which can be mitigated by either providing extra prior information or deploying more base stations.