 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysical Human-Robot Interaction: A Critical Review of Safety Constraints
Jan 27, 2026This paper aims to provide a clear and rigorous understanding of commonly recognized safety constraints in physical human-robot interaction, i.e. ISO/TS 15066, by examining how they are obtained and which assumptions support them. We clarify the interpretation and practical impact of key simplifying assumptions, show how these modeling choices affect both safety and performance across the system, and indicate specific design parameters that can be adjusted in safety-critical control implementations. Numerical examples are provided to quantify performance degradation induced by common approximations and simplifying design choices. Furthermore, the fundamental role of energy in safety assessment is emphasized, and focused insights are offered on the existing body of work concerning energy-based safety methodologies.
When do Lyapunov Subcenter Manifolds become Eigenmanifolds?
May 19, 2025



Multi-body mechanical systems have rich internal dynamics, which can be exploited to formulate efficient control targets. For periodic regulation tasks in robotics applications, this motivated the extension of the theory on nonlinear normal modes to Riemannian manifolds, and led to the definition of Eigenmanifolds. This definition is geometric, which is advantageous for generality within robotics but also obscures the connection of Eigenmanifolds to a large body of results from the literature on nonlinear dynamics. We bridge this gap, showing that Eigenmanifolds are instances of Lyapunov subcenter manifolds (LSMs), and that their stronger geometric properties with respect to LSMs follow from a time-symmetry of conservative mechanical systems. This directly leads to local existence and uniqueness results for Eigenmanifolds. Furthermore, we show that an additional spatial symmetry provides Eigenmanifolds with yet stronger properties of Rosenberg manifolds, which can be favorable for control applications, and we present a sufficient condition for their existence and uniqueness. These theoretical results are numerically confirmed on two mechanical systems with a non-constant inertia tensor: a double pendulum and a 5-link pendulum.
Anatomical Region Recognition and Real-time Bone Tracking Methods by Dynamically Decoding A-Mode Ultrasound Signals
May 31, 2024



Accurate bone tracking is crucial for kinematic analysis in orthopedic surgery and prosthetic robotics. Traditional methods (e.g., skin markers) are subject to soft tissue artifacts, and the bone pins used in surgery introduce the risk of additional trauma and infection. For electromyography (EMG), its inability to directly measure joint angles requires complex algorithms for kinematic estimation. To address these issues, A-mode ultrasound-based tracking has been proposed as a non-invasive and safe alternative. However, this approach suffers from limited accuracy in peak detection when processing received ultrasound signals. To build a precise and real-time bone tracking approach, this paper introduces a deep learning-based method for anatomical region recognition and bone tracking using A-mode ultrasound signals, specifically focused on the knee joint. The algorithm is capable of simultaneously performing bone tracking and identifying the anatomical region where the A-mode ultrasound transducer is placed. It contains the fully connection between all encoding and decoding layers of the cascaded U-Nets to focus only on the signal region that is most likely to have the bone peak, thus pinpointing the exact location of the peak and classifying the anatomical region of the signal. The experiment showed a 97% accuracy in the classification of the anatomical regions and a precision of around 0.5$\pm$1mm under dynamic tracking conditions for various anatomical areas surrounding the knee joint. In general, this approach shows great potential beyond the traditional method, in terms of the accuracy achieved and the recognition of the anatomical region where the ultrasound has been attached as an additional functionality.
Deep Learning based acoustic measurement approach for robotic applications on orthopedics
Mar 09, 2024



In Total Knee Replacement Arthroplasty (TKA), surgical robotics can provide image-guided navigation to fit implants with high precision. Its tracking approach highly relies on inserting bone pins into the bones tracked by the optical tracking system. This is normally done by invasive, radiative manners (implantable markers and CT scans), which introduce unnecessary trauma and prolong the preparation time for patients. To tackle this issue, ultrasound-based bone tracking could offer an alternative. In this study, we proposed a novel deep learning structure to improve the accuracy of bone tracking by an A-mode ultrasound (US). We first obtained a set of ultrasound dataset from the cadaver experiment, where the ground truth locations of bones were calculated using bone pins. These data were used to train the proposed CasAtt-UNet to predict bone location automatically and robustly. The ground truth bone locations and those locations of US were recorded simultaneously. Therefore, we could label bone peaks in the raw US signals. As a result, our method achieved sub millimeter precision across all eight bone areas with the only exception of one channel in the ankle. This method enables the robust measurement of lower extremity bone positions from 1D raw ultrasound signals. It shows great potential to apply A-mode ultrasound in orthopedic surgery from safe, convenient, and efficient perspectives.
Optimal Potential Shaping on SE via Neural ODEs on Lie Groups
Jan 25, 2024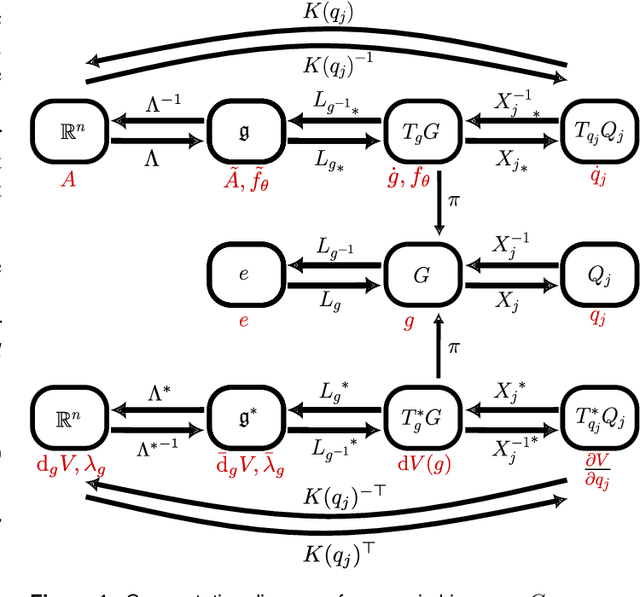
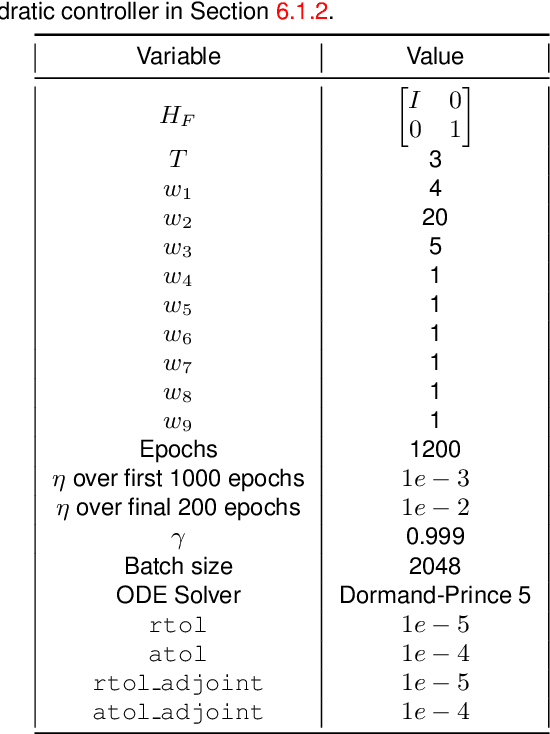
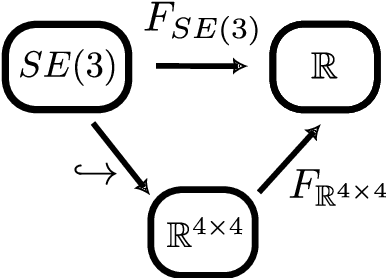
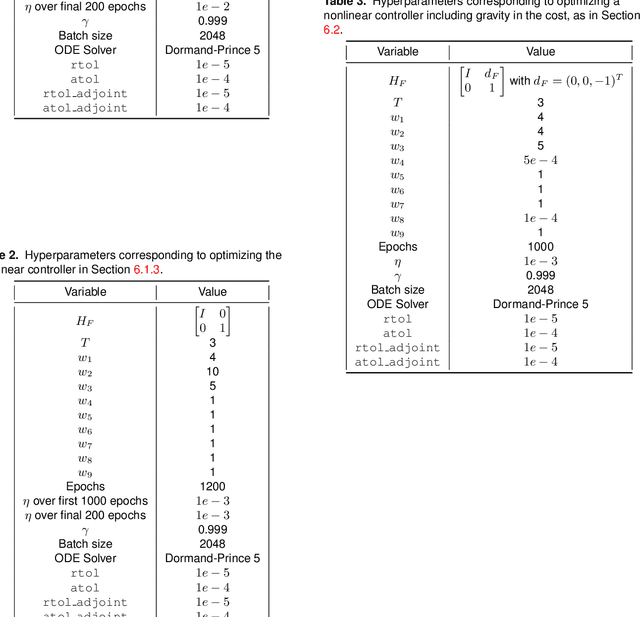
This work presents a novel approach for the optimization of dynamic systems on finite-dimensional Lie groups. We rephrase dynamic systems as so-called neural ordinary differential equations (neural ODEs), and formulate the optimization problem on Lie groups. A gradient descent optimization algorithm is presented to tackle the optimization numerically. Our algorithm is scalable, and applicable to any finite dimensional Lie group, including matrix Lie groups. By representing the system at the Lie algebra level, we reduce the computational cost of the gradient computation. In an extensive example, optimal potential energy shaping for control of a rigid body is treated. The optimal control problem is phrased as an optimization of a neural ODE on the Lie group SE(3), and the controller is iteratively optimized. The final controller is validated on a state-regulation task.
Exp-A Robot modeling Software based on Exponential Maps
Sep 13, 2023$ $Deriving a robot's equation of motion typically requires placing multiple coordinate frames, commonly using the Denavit-Hartenberg convention to express the kinematic and dynamic relationships between segments. This paper presents an alternative using the differential geometric method of Exponential Maps, which reduces the number of coordinate frame choices to two. The traditional and differential geometric methods are compared, and the conceptual and practical differences are detailed. The open-source software, Exp[licit], based on the differential geometric method, is introduced. It is intended for use by researchers and engineers with basic knowledge of geometry and robotics. Code snippets and an example application are provided to demonstrate the benefits of the differential geometric method and assist users to get started with the software.
Passivizing learned policies and learning passive policies with virtual energy tanks in robotics
Jan 31, 2023Within a robotic context, we merge the techniques of passivity-based control (PBC) and reinforcement learning (RL) with the goal of eliminating some of their reciprocal weaknesses, as well as inducing novel promising features in the resulting framework. We frame our contribution in a scenario where PBC is implemented by means of virtual energy tanks, a control technique developed to achieve closed-loop passivity for any arbitrary control input. Albeit the latter result is heavily used, we discuss why its practical application at its current stage remains rather limited, which makes contact with the highly debated claim that passivity-based techniques are associated to a loss of performance. The use of RL allows to learn a control policy which can be passivized using the energy tank architecture, combining the versatility of learning approaches and the system theoretic properties which can be inferred due to the energy tanks. Simulations show the validity of the approach, as well as novel interesting research directions in energy-aware robotics.
Discovering Efficient Periodic Behaviours in Mechanical Systems via Neural Approximators
Dec 29, 2022It is well known that conservative mechanical systems exhibit local oscillatory behaviours due to their elastic and gravitational potentials, which completely characterise these periodic motions together with the inertial properties of the system. The classification of these periodic behaviours and their geometric characterisation are in an on-going secular debate, which recently led to the so-called eigenmanifold theory. The eigenmanifold characterises nonlinear oscillations as a generalisation of linear eigenspaces. With the motivation of performing periodic tasks efficiently, we use tools coming from this theory to construct an optimization problem aimed at inducing desired closed-loop oscillations through a state feedback law. We solve the constructed optimization problem via gradient-descent methods involving neural networks. Extensive simulations show the validity of the approach.
Towards Autonomous Pipeline Inspection with Hierarchical Reinforcement Learning
Jul 08, 2021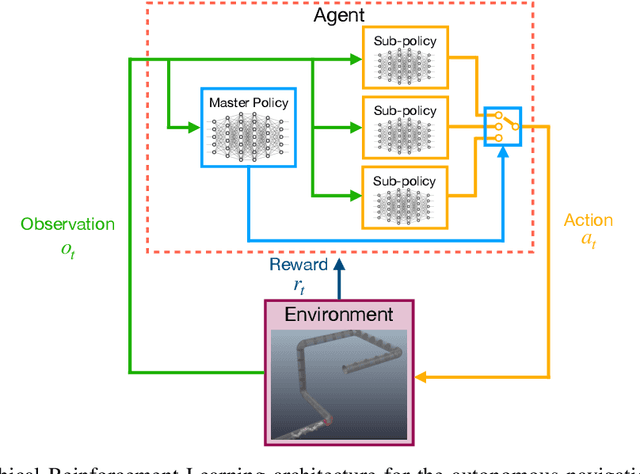
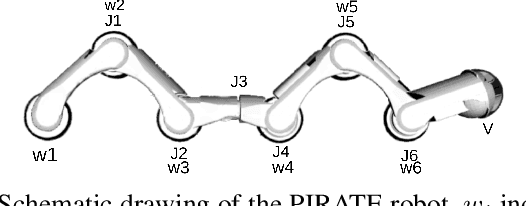
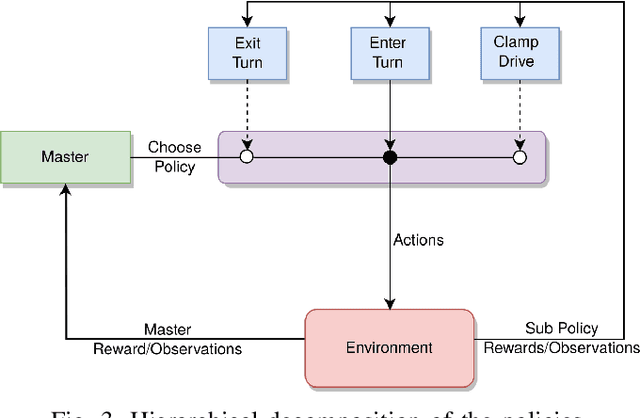
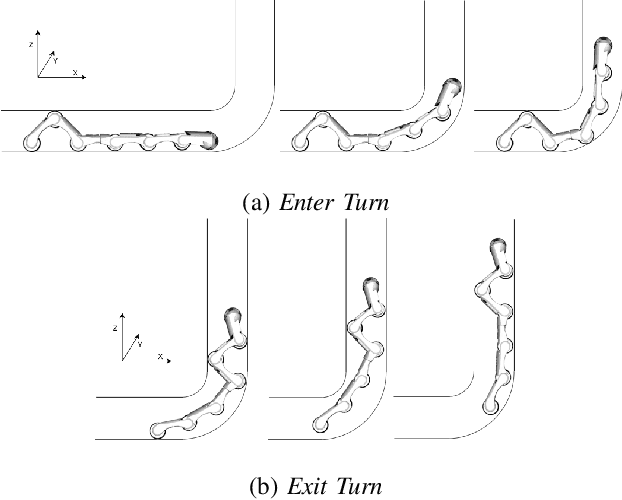
Inspection and maintenance are two crucial aspects of industrial pipeline plants. While robotics has made tremendous progress in the mechanic design of in-pipe inspection robots, the autonomous control of such robots is still a big open challenge due to the high number of actuators and the complex manoeuvres required. To address this problem, we investigate the usage of Deep Reinforcement Learning for achieving autonomous navigation of in-pipe robots in pipeline networks with complex topologies. Moreover, we introduce a hierarchical policy decomposition based on Hierarchical Reinforcement Learning to learn robust high-level navigation skills. We show that the hierarchical structure introduced in the policy is fundamental for solving the navigation task through pipes and necessary for achieving navigation performances superior to human-level control.
Low Dimensional State Representation Learning with Robotics Priors in Continuous Action Spaces
Jul 04, 2021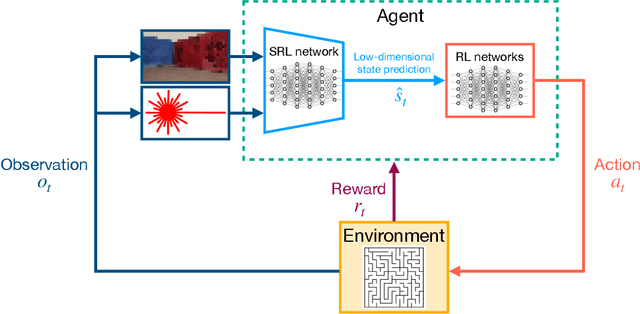

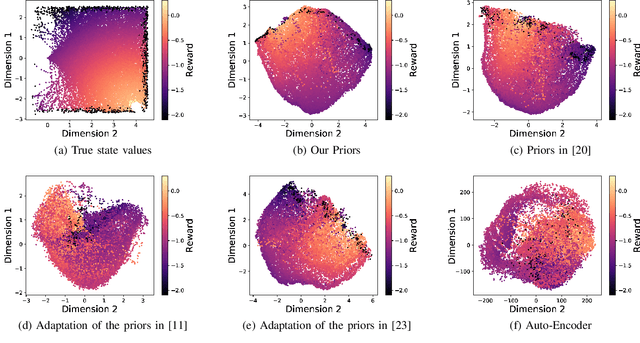
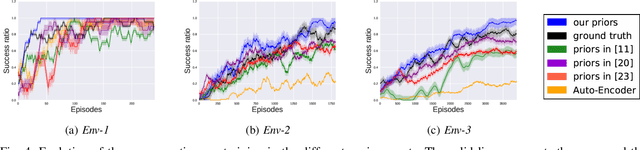
Autonomous robots require high degrees of cognitive and motoric intelligence to come into our everyday life. In non-structured environments and in the presence of uncertainties, such degrees of intelligence are not easy to obtain. Reinforcement learning algorithms have proven to be capable of solving complicated robotics tasks in an end-to-end fashion without any need for hand-crafted features or policies. Especially in the context of robotics, in which the cost of real-world data is usually extremely high, reinforcement learning solutions achieving high sample efficiency are needed. In this paper, we propose a framework combining the learning of a low-dimensional state representation, from high-dimensional observations coming from the robot's raw sensory readings, with the learning of the optimal policy, given the learned state representation. We evaluate our framework in the context of mobile robot navigation in the case of continuous state and action spaces. Moreover, we study the problem of transferring what learned in the simulated virtual environment to the real robot without further retraining using real-world data in the presence of visual and depth distractors, such as lighting changes and moving obstacles.