 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysical Human-Robot Interaction: A Critical Review of Safety Constraints
Jan 27, 2026This paper aims to provide a clear and rigorous understanding of commonly recognized safety constraints in physical human-robot interaction, i.e. ISO/TS 15066, by examining how they are obtained and which assumptions support them. We clarify the interpretation and practical impact of key simplifying assumptions, show how these modeling choices affect both safety and performance across the system, and indicate specific design parameters that can be adjusted in safety-critical control implementations. Numerical examples are provided to quantify performance degradation induced by common approximations and simplifying design choices. Furthermore, the fundamental role of energy in safety assessment is emphasized, and focused insights are offered on the existing body of work concerning energy-based safety methodologies.
A Geometric Task-Space Port-Hamiltonian Formulation for Redundant Manipulators
Dec 16, 2025We present a novel geometric port-Hamiltonian formulation of redundant manipulators performing a differential kinematic task $η=J(q)\dot{q}$, where $q$ is a point on the configuration manifold, $η$ is a velocity-like task space variable, and $J(q)$ is a linear map representing the task, for example the classical analytic or geometric manipulator Jacobian matrix. The proposed model emerges from a change of coordinates from canonical Hamiltonian dynamics, and splits the standard Hamiltonian momentum variable into a task-space momentum variable and a null-space momentum variable. Properties of this model and relation to Lagrangian formulations present in the literature are highlighted. Finally, we apply the proposed model in an \textit{Interconnection and Damping Assignment Passivity-Based Control} (IDA-PBC) design to stabilize and shape the impedance of a 7-DOF Emika Panda robot in simulation.
Optimal Feed-Forward Control for Robotic Transportation of Solid and Liquid Materials via Nonprehensile Grasp
Jun 25, 2023In everyday life, we often find that we can maintain an object's equilibrium on a tray by adjusting its orientation. Building upon this observation and extending the method we previously proposed to suppress sloshing in a moving vessel, this paper presents a feedforward control approach for transporting objects with a robot that are not firmly grasped but simply placed on a tray. The proposed approach combines smoothing actions and end-effector re-orientation to prevent object sliding. It can be integrated into existing robotic systems as a plug-in element between the reference trajectory generator and the robot control. To demonstrate the effectiveness of the proposed methods, particularly when dealing with unknown reference signals, we embed them in a direct teleoperation scheme. In this scheme, the user commands the robot carrying the tray by simply moving their hand in free space, with the hand's 3D position detected by a motion capture system. Furthermore, in the case of point-to-point motions, the same feedforward control, when fed with step inputs representing the desired goal position, dynamically generates the minimum-time reference trajectory that complies with velocity and acceleration constraints, thus avoiding sloshing and slipping. More information and accompanying videos can be found at https://sites.google.com/view/robotwaiter/
Passivizing learned policies and learning passive policies with virtual energy tanks in robotics
Jan 31, 2023Within a robotic context, we merge the techniques of passivity-based control (PBC) and reinforcement learning (RL) with the goal of eliminating some of their reciprocal weaknesses, as well as inducing novel promising features in the resulting framework. We frame our contribution in a scenario where PBC is implemented by means of virtual energy tanks, a control technique developed to achieve closed-loop passivity for any arbitrary control input. Albeit the latter result is heavily used, we discuss why its practical application at its current stage remains rather limited, which makes contact with the highly debated claim that passivity-based techniques are associated to a loss of performance. The use of RL allows to learn a control policy which can be passivized using the energy tank architecture, combining the versatility of learning approaches and the system theoretic properties which can be inferred due to the energy tanks. Simulations show the validity of the approach, as well as novel interesting research directions in energy-aware robotics.
Effective Deployment of CNNs for 3DoF Pose Estimation and Grasping in Industrial Settings
Dec 24, 2020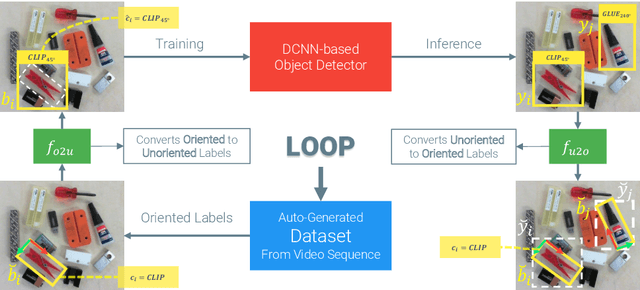
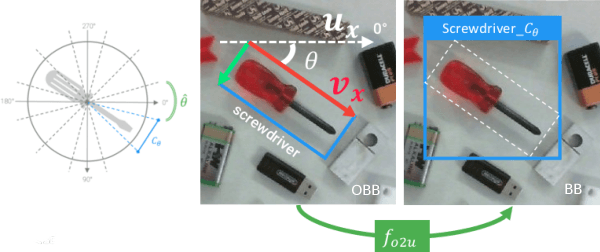
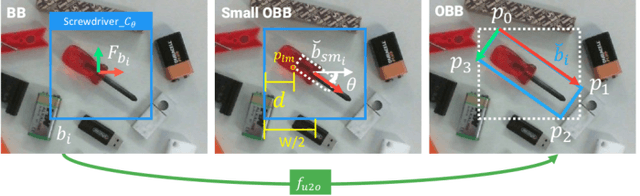
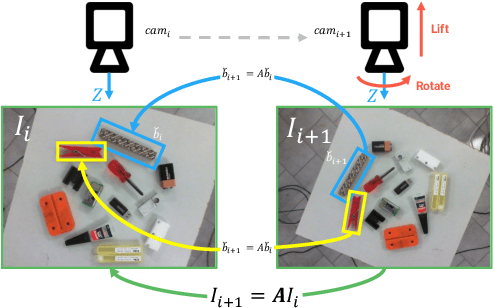
In this paper we investigate how to effectively deploy deep learning in practical industrial settings, such as robotic grasping applications. When a deep-learning based solution is proposed, usually lacks of any simple method to generate the training data. In the industrial field, where automation is the main goal, not bridging this gap is one of the main reasons why deep learning is not as widespread as it is in the academic world. For this reason, in this work we developed a system composed by a 3-DoF Pose Estimator based on Convolutional Neural Networks (CNNs) and an effective procedure to gather massive amounts of training images in the field with minimal human intervention. By automating the labeling stage, we also obtain very robust systems suitable for production-level usage. An open source implementation of our solution is provided, alongside with the dataset used for the experimental evaluation.