 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysical Human-Robot Interaction: A Critical Review of Safety Constraints
Jan 27, 2026This paper aims to provide a clear and rigorous understanding of commonly recognized safety constraints in physical human-robot interaction, i.e. ISO/TS 15066, by examining how they are obtained and which assumptions support them. We clarify the interpretation and practical impact of key simplifying assumptions, show how these modeling choices affect both safety and performance across the system, and indicate specific design parameters that can be adjusted in safety-critical control implementations. Numerical examples are provided to quantify performance degradation induced by common approximations and simplifying design choices. Furthermore, the fundamental role of energy in safety assessment is emphasized, and focused insights are offered on the existing body of work concerning energy-based safety methodologies.
A Geometric Task-Space Port-Hamiltonian Formulation for Redundant Manipulators
Dec 16, 2025We present a novel geometric port-Hamiltonian formulation of redundant manipulators performing a differential kinematic task $η=J(q)\dot{q}$, where $q$ is a point on the configuration manifold, $η$ is a velocity-like task space variable, and $J(q)$ is a linear map representing the task, for example the classical analytic or geometric manipulator Jacobian matrix. The proposed model emerges from a change of coordinates from canonical Hamiltonian dynamics, and splits the standard Hamiltonian momentum variable into a task-space momentum variable and a null-space momentum variable. Properties of this model and relation to Lagrangian formulations present in the literature are highlighted. Finally, we apply the proposed model in an \textit{Interconnection and Damping Assignment Passivity-Based Control} (IDA-PBC) design to stabilize and shape the impedance of a 7-DOF Emika Panda robot in simulation.
Shaping Explanations: Semantic Reward Modeling with Encoder-Only Transformers for GRPO
Sep 16, 2025While Large Language Models (LLMs) excel at generating human-like text, aligning their outputs with complex, qualitative goals like pedagogical soundness remains a significant challenge. Standard reinforcement learning techniques often rely on slow and expensive LLM-as-a-judge evaluations or on brittle, keyword-based metrics like ROUGE, which fail to capture the semantic essence of a high-quality explanation. In this work, we introduce a novel approach to reward shaping within the Group Relative Policy Optimisation (GRPO) framework. Our central contribution is the use of a small, efficient encoder-only transformer as a semantic reward model. This model provides a dense, semantically rich reward signal based on the cosine similarity between a generated explanation and a ground-truth reference, guiding the policy towards explanations that are not just factually correct but also structurally and conceptually aligned with expert reasoning. We apply this method to the task of training a model for the Italian medical-school entrance examinations, following standard domain-adaptive continued pre-training (CPT) and supervised fine-tuning (SFT). Our results demonstrate that GRPO with our proposed semantic reward significantly improves explanation faithfulness and clarity over a strong SFT baseline, showcasing the power of using lightweight encoder models for nuanced reward shaping in complex generation tasks
From Spectra to Geography: Intelligent Mapping of RRUFF Mineral Data
Nov 18, 2024



Accurately determining the geographic origin of mineral samples is pivotal for applications in geology, mineralogy, and material science. Leveraging the comprehensive Raman spectral data from the RRUFF database, this study introduces a novel machine learning framework aimed at geolocating mineral specimens at the country level. We employ a one-dimensional ConvNeXt1D neural network architecture to classify mineral spectra based solely on their spectral signatures. The processed dataset comprises over 32,900 mineral samples, predominantly natural, spanning 101 countries. Through five-fold cross-validation, the ConvNeXt1D model achieved an impressive average classification accuracy of 93%, demonstrating its efficacy in capturing geospatial patterns inherent in Raman spectra.
Limiting Kinetic Energy through Control Barrier Functions: Analysis and Experimental Validation
Nov 04, 2024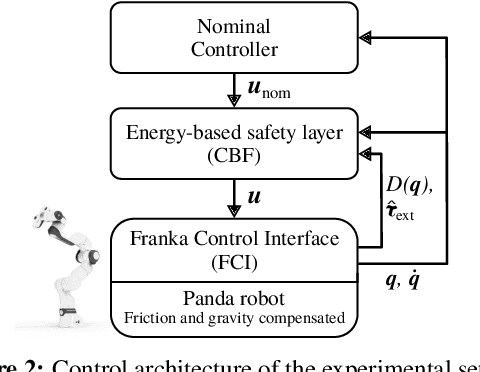
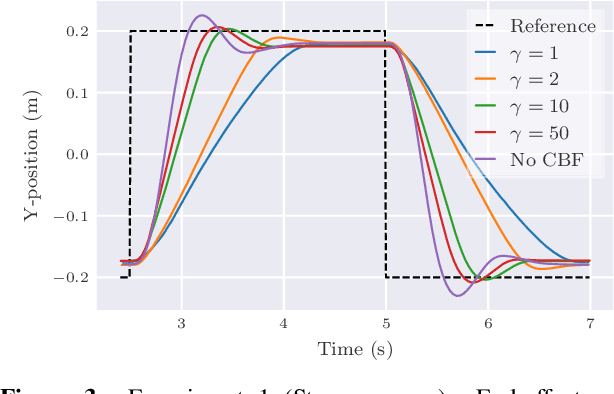
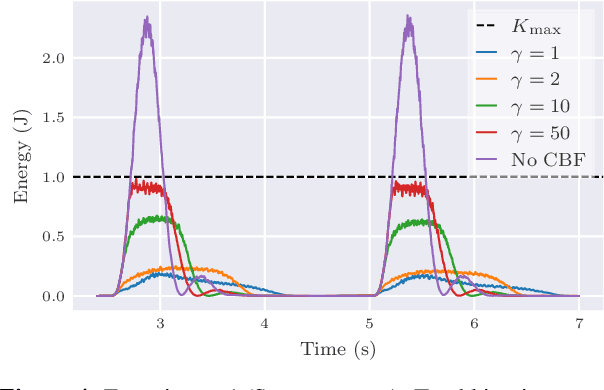
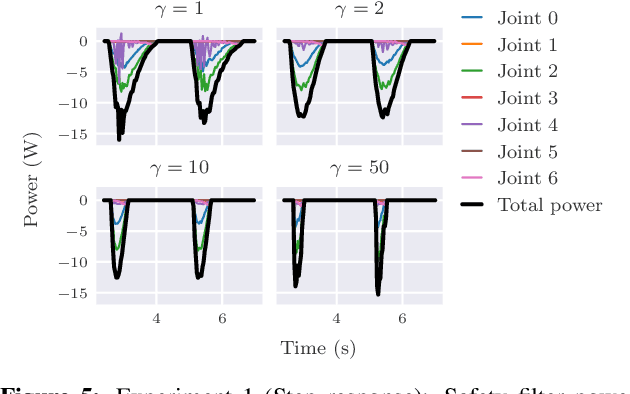
In the context of safety-critical control, we propose and analyse the use of Control Barrier Functions (CBFs) to limit the kinetic energy of torque-controlled robots. The proposed scheme is able to modify a nominal control action in a minimally invasive manner to achieve the desired kinetic energy limit. We show how this safety condition is achieved by appropriately injecting damping in the underlying robot dynamics independently of the nominal controller structure. We present an extensive experimental validation of the approach on a 7-Degree of Freedom (DoF) Franka Emika Panda robot. The results demonstrate that this approach provides an effective, minimally invasive safety layer that is straightforward to implement and is robust in real experiments.
Denoising Diffusion Planner: Learning Complex Paths from Low-Quality Demonstrations
Oct 28, 2024Denoising Diffusion Probabilistic Models (DDPMs) are powerful generative deep learning models that have been very successful at image generation, and, very recently, in path planning and control. In this paper, we investigate how to leverage the generalization and conditional-sampling capabilities of DDPMs to generate complex paths for a robotic end effector. We show that training a DDPM with synthetical and low-quality demonstrations is sufficient for generating nontrivial paths reaching arbitrary targets and avoiding obstacles. Additionally, we investigate different strategies for conditional sampling combining classifier-free and classifier-guided approaches. Eventually, we deploy the DDPM in a receding-horizon control scheme to enhance its planning capabilities. The Denoising Diffusion Planner is experimentally validated through various experiments on a Franka Emika Panda robot.
Optimal Potential Shaping on SE via Neural ODEs on Lie Groups
Jan 25, 2024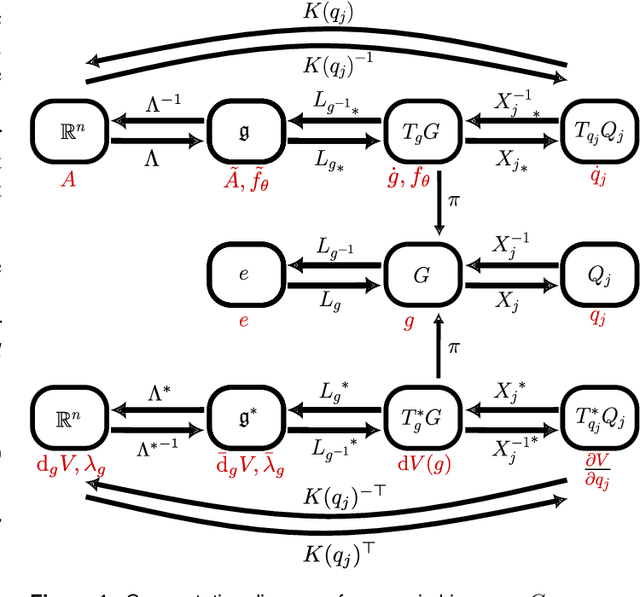
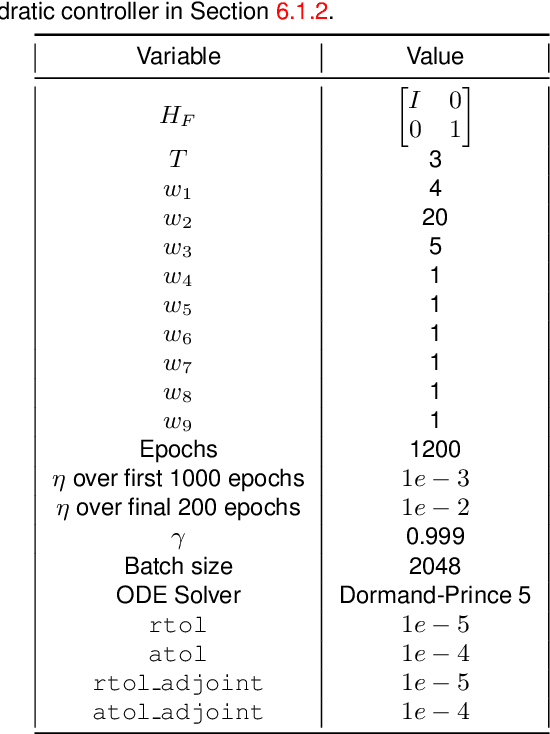
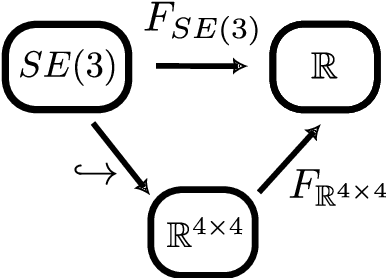
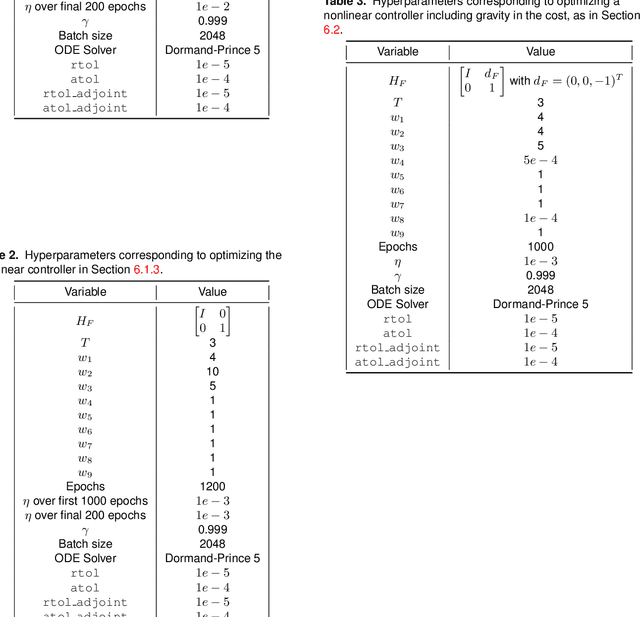
This work presents a novel approach for the optimization of dynamic systems on finite-dimensional Lie groups. We rephrase dynamic systems as so-called neural ordinary differential equations (neural ODEs), and formulate the optimization problem on Lie groups. A gradient descent optimization algorithm is presented to tackle the optimization numerically. Our algorithm is scalable, and applicable to any finite dimensional Lie group, including matrix Lie groups. By representing the system at the Lie algebra level, we reduce the computational cost of the gradient computation. In an extensive example, optimal potential energy shaping for control of a rigid body is treated. The optimal control problem is phrased as an optimization of a neural ODE on the Lie group SE(3), and the controller is iteratively optimized. The final controller is validated on a state-regulation task.
Trajectory Generation, Control, and Safety with Denoising Diffusion Probabilistic Models
Jun 27, 2023We present a framework for safety-critical optimal control of physical systems based on denoising diffusion probabilistic models (DDPMs). The technology of control barrier functions (CBFs), encoding desired safety constraints, is used in combination with DDPMs to plan actions by iteratively denoising trajectories through a CBF-based guided sampling procedure. At the same time, the generated trajectories are also guided to maximize a future cumulative reward representing a specific task to be optimally executed. The proposed scheme can be seen as an offline and model-based reinforcement learning algorithm resembling in its functionalities a model-predictive control optimization scheme with receding horizon in which the selected actions lead to optimal and safe trajectories.
Passivizing learned policies and learning passive policies with virtual energy tanks in robotics
Jan 31, 2023Within a robotic context, we merge the techniques of passivity-based control (PBC) and reinforcement learning (RL) with the goal of eliminating some of their reciprocal weaknesses, as well as inducing novel promising features in the resulting framework. We frame our contribution in a scenario where PBC is implemented by means of virtual energy tanks, a control technique developed to achieve closed-loop passivity for any arbitrary control input. Albeit the latter result is heavily used, we discuss why its practical application at its current stage remains rather limited, which makes contact with the highly debated claim that passivity-based techniques are associated to a loss of performance. The use of RL allows to learn a control policy which can be passivized using the energy tank architecture, combining the versatility of learning approaches and the system theoretic properties which can be inferred due to the energy tanks. Simulations show the validity of the approach, as well as novel interesting research directions in energy-aware robotics.
Discovering Efficient Periodic Behaviours in Mechanical Systems via Neural Approximators
Dec 29, 2022It is well known that conservative mechanical systems exhibit local oscillatory behaviours due to their elastic and gravitational potentials, which completely characterise these periodic motions together with the inertial properties of the system. The classification of these periodic behaviours and their geometric characterisation are in an on-going secular debate, which recently led to the so-called eigenmanifold theory. The eigenmanifold characterises nonlinear oscillations as a generalisation of linear eigenspaces. With the motivation of performing periodic tasks efficiently, we use tools coming from this theory to construct an optimization problem aimed at inducing desired closed-loop oscillations through a state feedback law. We solve the constructed optimization problem via gradient-descent methods involving neural networks. Extensive simulations show the validity of the approach.