 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLimiting Kinetic Energy through Control Barrier Functions: Analysis and Experimental Validation
Paper and Code
Nov 04, 2024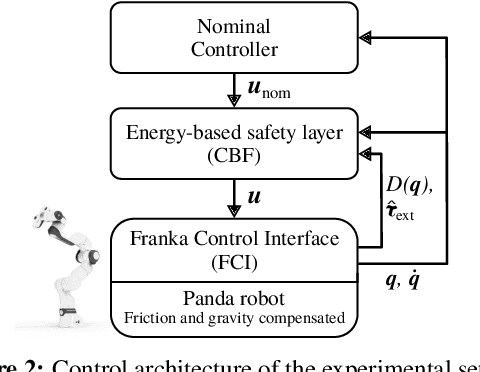
In the context of safety-critical control, we propose and analyse the use of Control Barrier Functions (CBFs) to limit the kinetic energy of torque-controlled robots. The proposed scheme is able to modify a nominal control action in a minimally invasive manner to achieve the desired kinetic energy limit. We show how this safety condition is achieved by appropriately injecting damping in the underlying robot dynamics independently of the nominal controller structure. We present an extensive experimental validation of the approach on a 7-Degree of Freedom (DoF) Franka Emika Panda robot. The results demonstrate that this approach provides an effective, minimally invasive safety layer that is straightforward to implement and is robust in real experiments.