 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen do Lyapunov Subcenter Manifolds become Eigenmanifolds?
May 19, 2025



Multi-body mechanical systems have rich internal dynamics, which can be exploited to formulate efficient control targets. For periodic regulation tasks in robotics applications, this motivated the extension of the theory on nonlinear normal modes to Riemannian manifolds, and led to the definition of Eigenmanifolds. This definition is geometric, which is advantageous for generality within robotics but also obscures the connection of Eigenmanifolds to a large body of results from the literature on nonlinear dynamics. We bridge this gap, showing that Eigenmanifolds are instances of Lyapunov subcenter manifolds (LSMs), and that their stronger geometric properties with respect to LSMs follow from a time-symmetry of conservative mechanical systems. This directly leads to local existence and uniqueness results for Eigenmanifolds. Furthermore, we show that an additional spatial symmetry provides Eigenmanifolds with yet stronger properties of Rosenberg manifolds, which can be favorable for control applications, and we present a sufficient condition for their existence and uniqueness. These theoretical results are numerically confirmed on two mechanical systems with a non-constant inertia tensor: a double pendulum and a 5-link pendulum.
Swing-Up of a Weakly Actuated Double Pendulum via Nonlinear Normal Modes
Apr 12, 2024



We identify the nonlinear normal modes spawning from the stable equilibrium of a double pendulum under gravity, and we establish their connection to homoclinic orbits through the unstable upright position as energy increases. This result is exploited to devise an efficient swing-up strategy for a double pendulum with weak, saturating actuators. Our approach involves stabilizing the system onto periodic orbits associated with the nonlinear modes while gradually injecting energy. Since these modes are autonomous system evolutions, the required control effort for stabilization is minimal. Even with actuator limitations of less than 1% of the maximum gravitational torque, the proposed method accomplishes the swing-up of the double pendulum by allowing sufficient time.
Optimal Potential Shaping on SE via Neural ODEs on Lie Groups
Jan 25, 2024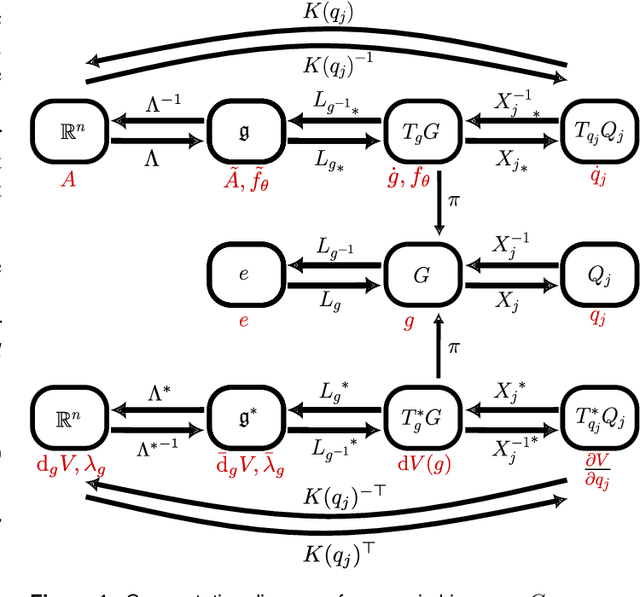
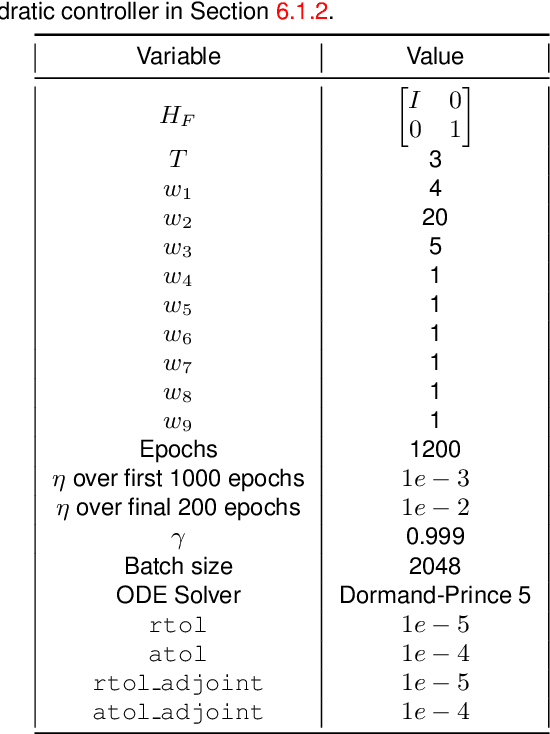
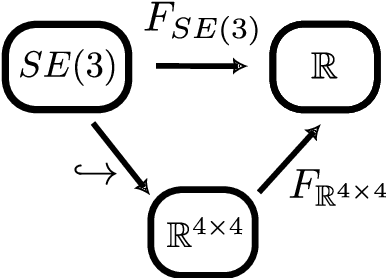
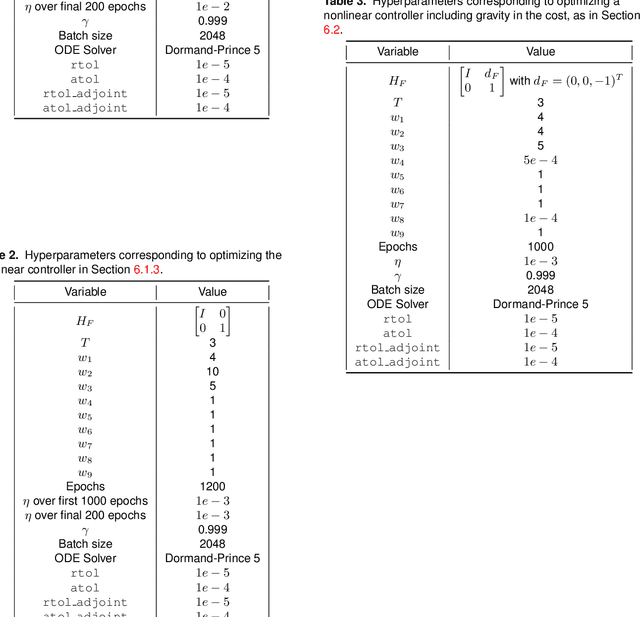
This work presents a novel approach for the optimization of dynamic systems on finite-dimensional Lie groups. We rephrase dynamic systems as so-called neural ordinary differential equations (neural ODEs), and formulate the optimization problem on Lie groups. A gradient descent optimization algorithm is presented to tackle the optimization numerically. Our algorithm is scalable, and applicable to any finite dimensional Lie group, including matrix Lie groups. By representing the system at the Lie algebra level, we reduce the computational cost of the gradient computation. In an extensive example, optimal potential energy shaping for control of a rigid body is treated. The optimal control problem is phrased as an optimization of a neural ODE on the Lie group SE(3), and the controller is iteratively optimized. The final controller is validated on a state-regulation task.