 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReloc-VGGT: Visual Re-localization with Geometry Grounded Transformer
Dec 26, 2025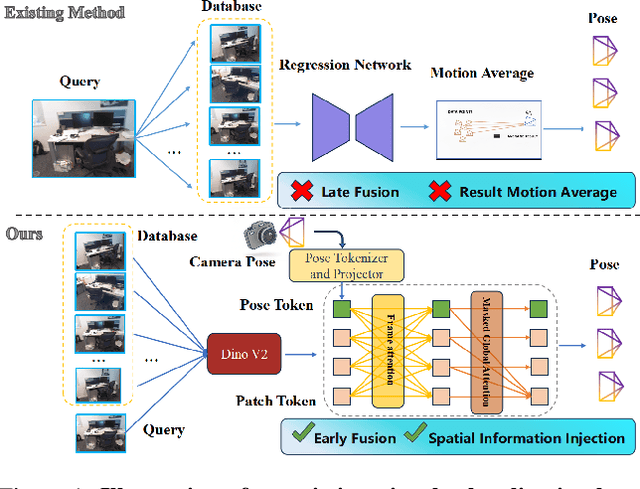
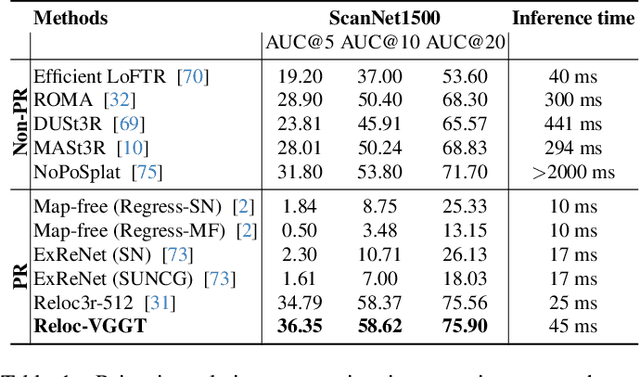
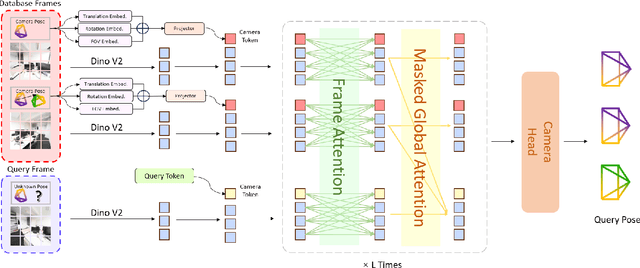
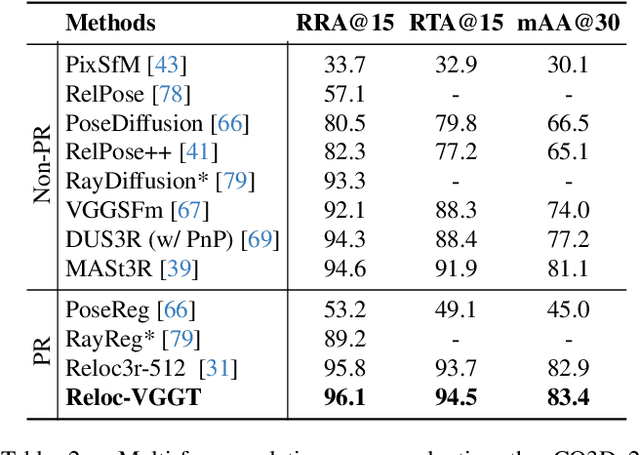
Visual localization has traditionally been formulated as a pair-wise pose regression problem. Existing approaches mainly estimate relative poses between two images and employ a late-fusion strategy to obtain absolute pose estimates. However, the late motion average is often insufficient for effectively integrating spatial information, and its accuracy degrades in complex environments. In this paper, we present the first visual localization framework that performs multi-view spatial integration through an early-fusion mechanism, enabling robust operation in both structured and unstructured environments. Our framework is built upon the VGGT backbone, which encodes multi-view 3D geometry, and we introduce a pose tokenizer and projection module to more effectively exploit spatial relationships from multiple database views. Furthermore, we propose a novel sparse mask attention strategy that reduces computational cost by avoiding the quadratic complexity of global attention, thereby enabling real-time performance at scale. Trained on approximately eight million posed image pairs, Reloc-VGGT demonstrates strong accuracy and remarkable generalization ability. Extensive experiments across diverse public datasets consistently validate the effectiveness and efficiency of our approach, delivering high-quality camera pose estimates in real time while maintaining robustness to unseen environments. Our code and models will be publicly released upon acceptance.https://github.com/dtc111111/Reloc-VGGT.
D$^2$GSLAM: 4D Dynamic Gaussian Splatting SLAM
Dec 10, 2025Recent advances in Dense Simultaneous Localization and Mapping (SLAM) have demonstrated remarkable performance in static environments. However, dense SLAM in dynamic environments remains challenging. Most methods directly remove dynamic objects and focus solely on static scene reconstruction, which ignores the motion information contained in these dynamic objects. In this paper, we present D$^2$GSLAM, a novel dynamic SLAM system utilizing Gaussian representation, which simultaneously performs accurate dynamic reconstruction and robust tracking within dynamic environments. Our system is composed of four key components: (i) We propose a geometric-prompt dynamic separation method to distinguish between static and dynamic elements of the scene. This approach leverages the geometric consistency of Gaussian representation and scene geometry to obtain coarse dynamic regions. The regions then serve as prompts to guide the refinement of the coarse mask for achieving accurate motion mask. (ii) To facilitate accurate and efficient mapping of the dynamic scene, we introduce dynamic-static composite representation that integrates static 3D Gaussians with dynamic 4D Gaussians. This representation allows for modeling the transitions between static and dynamic states of objects in the scene for composite mapping and optimization. (iii) We employ a progressive pose refinement strategy that leverages both the multi-view consistency of static scene geometry and motion information from dynamic objects to achieve accurate camera tracking. (iv) We introduce a motion consistency loss, which leverages the temporal continuity in object motions for accurate dynamic modeling. Our D$^2$GSLAM demonstrates superior performance on dynamic scenes in terms of mapping and tracking accuracy, while also showing capability in accurate dynamic modeling.
SGLoc: Semantic Localization System for Camera Pose Estimation from 3D Gaussian Splatting Representation
Jul 16, 2025We propose SGLoc, a novel localization system that directly regresses camera poses from 3D Gaussian Splatting (3DGS) representation by leveraging semantic information. Our method utilizes the semantic relationship between 2D image and 3D scene representation to estimate the 6DoF pose without prior pose information. In this system, we introduce a multi-level pose regression strategy that progressively estimates and refines the pose of query image from the global 3DGS map, without requiring initial pose priors. Moreover, we introduce a semantic-based global retrieval algorithm that establishes correspondences between 2D (image) and 3D (3DGS map). By matching the extracted scene semantic descriptors of 2D query image and 3DGS semantic representation, we align the image with the local region of the global 3DGS map, thereby obtaining a coarse pose estimation. Subsequently, we refine the coarse pose by iteratively optimizing the difference between the query image and the rendered image from 3DGS. Our SGLoc demonstrates superior performance over baselines on 12scenes and 7scenes datasets, showing excellent capabilities in global localization without initial pose prior. Code will be available at https://github.com/IRMVLab/SGLoc.
ADD-SLAM: Adaptive Dynamic Dense SLAM with Gaussian Splatting
May 26, 2025Recent advancements in Neural Radiance Fields (NeRF) and 3D Gaussian-based Simultaneous Localization and Mapping (SLAM) methods have demonstrated exceptional localization precision and remarkable dense mapping performance. However, dynamic objects introduce critical challenges by disrupting scene consistency, leading to tracking drift and mapping artifacts. Existing methods that employ semantic segmentation or object detection for dynamic identification and filtering typically rely on predefined categorical priors, while discarding dynamic scene information crucial for robotic applications such as dynamic obstacle avoidance and environmental interaction. To overcome these challenges, we propose ADD-SLAM: an Adaptive Dynamic Dense SLAM framework based on Gaussian splitting. We design an adaptive dynamic identification mechanism grounded in scene consistency analysis, comparing geometric and textural discrepancies between real-time observations and historical maps. Ours requires no predefined semantic category priors and adaptively discovers scene dynamics. Precise dynamic object recognition effectively mitigates interference from moving targets during localization. Furthermore, we propose a dynamic-static separation mapping strategy that constructs a temporal Gaussian model to achieve online incremental dynamic modeling. Experiments conducted on multiple dynamic datasets demonstrate our method's flexible and accurate dynamic segmentation capabilities, along with state-of-the-art performance in both localization and mapping.
FreeDriveRF: Monocular RGB Dynamic NeRF without Poses for Autonomous Driving via Point-Level Dynamic-Static Decoupling
May 14, 2025Dynamic scene reconstruction for autonomous driving enables vehicles to perceive and interpret complex scene changes more precisely. Dynamic Neural Radiance Fields (NeRFs) have recently shown promising capability in scene modeling. However, many existing methods rely heavily on accurate poses inputs and multi-sensor data, leading to increased system complexity. To address this, we propose FreeDriveRF, which reconstructs dynamic driving scenes using only sequential RGB images without requiring poses inputs. We innovatively decouple dynamic and static parts at the early sampling level using semantic supervision, mitigating image blurring and artifacts. To overcome the challenges posed by object motion and occlusion in monocular camera, we introduce a warped ray-guided dynamic object rendering consistency loss, utilizing optical flow to better constrain the dynamic modeling process. Additionally, we incorporate estimated dynamic flow to constrain the pose optimization process, improving the stability and accuracy of unbounded scene reconstruction. Extensive experiments conducted on the KITTI and Waymo datasets demonstrate the superior performance of our method in dynamic scene modeling for autonomous driving.
Towards Autonomous Indoor Parking: A Globally Consistent Semantic SLAM System and A Semantic Localization Subsystem
Oct 16, 2024



We propose a globally consistent semantic SLAM system (GCSLAM) and a semantic-fusion localization subsystem (SF-Loc), which achieves accurate semantic mapping and robust localization in complex parking lots. Visual cameras (front-view and surround-view), IMU, and wheel encoder form the input sensor configuration of our system. The first part of our work is GCSLAM. GCSLAM introduces a novel factor graph for the optimization of poses and semantic map, which incorporates innovative error terms based on multi-sensor data and BEV (bird's-eye view) semantic information. Additionally, GCSLAM integrates a Global Slot Management module that stores and manages parking slot observations. SF-Loc is the second part of our work, which leverages the semantic map built by GCSLAM to conduct map-based localization. SF-Loc integrates registration results and odometry poses with a novel factor graph. Our system demonstrates superior performance over existing SLAM on two real-world datasets, showing excellent capabilities in robust global localization and precise semantic mapping.
3D Gaussian Splatting in Robotics: A Survey
Oct 16, 2024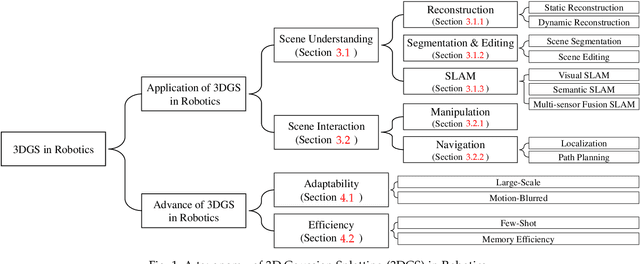
Dense 3D representations of the environment have been a long-term goal in the robotics field. While previous Neural Radiance Fields (NeRF) representation have been prevalent for its implicit, coordinate-based model, the recent emergence of 3D Gaussian Splatting (3DGS) has demonstrated remarkable potential in its explicit radiance field representation. By leveraging 3D Gaussian primitives for explicit scene representation and enabling differentiable rendering, 3DGS has shown significant advantages over other radiance fields in real-time rendering and photo-realistic performance, which is beneficial for robotic applications. In this survey, we provide a comprehensive understanding of 3DGS in the field of robotics. We divide our discussion of the related works into two main categories: the application of 3DGS and the advancements in 3DGS techniques. In the application section, we explore how 3DGS has been utilized in various robotics tasks from scene understanding and interaction perspectives. The advance of 3DGS section focuses on the improvements of 3DGS own properties in its adaptability and efficiency, aiming to enhance its performance in robotics. We then summarize the most commonly used datasets and evaluation metrics in robotics. Finally, we identify the challenges and limitations of current 3DGS methods and discuss the future development of 3DGS in robotics.
NeuroGauss4D-PCI: 4D Neural Fields and Gaussian Deformation Fields for Point Cloud Interpolation
May 23, 2024Point Cloud Interpolation confronts challenges from point sparsity, complex spatiotemporal dynamics, and the difficulty of deriving complete 3D point clouds from sparse temporal information. This paper presents NeuroGauss4D-PCI, which excels at modeling complex non-rigid deformations across varied dynamic scenes. The method begins with an iterative Gaussian cloud soft clustering module, offering structured temporal point cloud representations. The proposed temporal radial basis function Gaussian residual utilizes Gaussian parameter interpolation over time, enabling smooth parameter transitions and capturing temporal residuals of Gaussian distributions. Additionally, a 4D Gaussian deformation field tracks the evolution of these parameters, creating continuous spatiotemporal deformation fields. A 4D neural field transforms low-dimensional spatiotemporal coordinates ($x,y,z,t$) into a high-dimensional latent space. Finally, we adaptively and efficiently fuse the latent features from neural fields and the geometric features from Gaussian deformation fields. NeuroGauss4D-PCI outperforms existing methods in point cloud frame interpolation, delivering leading performance on both object-level (DHB) and large-scale autonomous driving datasets (NL-Drive), with scalability to auto-labeling and point cloud densification tasks. The source code is released at https://github.com/jiangchaokang/NeuroGauss4D-PCI.
DVLO: Deep Visual-LiDAR Odometry with Local-to-Global Feature Fusion and Bi-Directional Structure Alignment
Mar 27, 2024



Information inside visual and LiDAR data is well complementary derived from the fine-grained texture of images and massive geometric information in point clouds. However, it remains challenging to explore effective visual-LiDAR fusion, mainly due to the intrinsic data structure inconsistency between two modalities: Images are regular and dense, but LiDAR points are unordered and sparse. To address the problem, we propose a local-to-global fusion network with bi-directional structure alignment. To obtain locally fused features, we project points onto image plane as cluster centers and cluster image pixels around each center. Image pixels are pre-organized as pseudo points for image-to-point structure alignment. Then, we convert points to pseudo images by cylindrical projection (point-to-image structure alignment) and perform adaptive global feature fusion between point features with local fused features. Our method achieves state-of-the-art performance on KITTI odometry and FlyingThings3D scene flow datasets compared to both single-modal and multi-modal methods. Codes will be released later.
SemGauss-SLAM: Dense Semantic Gaussian Splatting SLAM
Mar 12, 2024



We propose SemGauss-SLAM, the first semantic SLAM system utilizing 3D Gaussian representation, that enables accurate 3D semantic mapping, robust camera tracking, and high-quality rendering in real-time. In this system, we incorporate semantic feature embedding into 3D Gaussian representation, which effectively encodes semantic information within the spatial layout of the environment for precise semantic scene representation. Furthermore, we propose feature-level loss for updating 3D Gaussian representation, enabling higher-level guidance for 3D Gaussian optimization. In addition, to reduce cumulative drift and improve reconstruction accuracy, we introduce semantic-informed bundle adjustment leveraging semantic associations for joint optimization of 3D Gaussian representation and camera poses, leading to more robust tracking and consistent mapping. Our SemGauss-SLAM method demonstrates superior performance over existing dense semantic SLAM methods in terms of mapping and tracking accuracy on Replica and ScanNet datasets, while also showing excellent capabilities in novel-view semantic synthesis and 3D semantic mapping.