 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBetter Matching, Less Forgetting: A Quality-Guided Matcher for Transformer-based Incremental Object Detection
Mar 02, 2026Incremental Object Detection (IOD) aims to continuously learn new object classes without forgetting previously learned ones. A persistent challenge is catastrophic forgetting, primarily attributed to background shift in conventional detectors. While pseudo-labeling mitigates this in dense detectors, we identify a novel, distinct source of forgetting specific to DETR-like architectures: background foregrounding. This arises from the exhaustiveness constraint of the Hungarian matcher, which forcibly assigns every ground truth target to one prediction, even when predictions primarily cover background regions (i.e., low IoU). This erroneous supervision compels the model to misclassify background features as specific foreground classes, disrupting learned representations and accelerating forgetting. To address this, we propose a Quality-guided Min-Cost Max-Flow (Q-MCMF) matcher. To avoid forced assignments, Q-MCMF builds a flow graph and prunes implausible matches based on geometric quality. It then optimizes for the final matching that minimizes cost and maximizes valid assignments. This strategy eliminates harmful supervision from background foregrounding while maximizing foreground learning signals. Extensive experiments on the COCO dataset under various incremental settings demonstrate that our method consistently outperforms existing state-of-the-art approaches.
Knowing the Unknown: Interpretable Open-World Object Detection via Concept Decomposition Model
Feb 24, 2026Open-world object detection (OWOD) requires incrementally detecting known categories while reliably identifying unknown objects. Existing methods primarily focus on improving unknown recall, yet overlook interpretability, often leading to known-unknown confusion and reduced prediction reliability. This paper aims to make the entire OWOD framework interpretable, enabling the detector to truly "knowing the unknown". To this end, we propose a concept-driven InterPretable OWOD framework(IPOW) by introducing a Concept Decomposition Model (CDM) for OWOD, which explicitly decomposes the coupled RoI features in Faster R-CNN into discriminative, shared, and background concepts. Discriminative concepts identify the most discriminative features to enlarge the distances between known categories, while shared and background concepts, due to their strong generalization ability, can be readily transferred to detect unknown categories. Leveraging the interpretable framework, we identify that known-unknown confusion arises when unknown objects fall into the discriminative space of known classes. To address this, we propose Concept-Guided Rectification (CGR) to further resolve such confusion. Extensive experiments show that IPOW significantly improves unknown recall while mitigating confusion, and provides concept-level interpretability for both known and unknown predictions.
Attention Retention for Continual Learning with Vision Transformers
Feb 05, 2026Continual learning (CL) empowers AI systems to progressively acquire knowledge from non-stationary data streams. However, catastrophic forgetting remains a critical challenge. In this work, we identify attention drift in Vision Transformers as a primary source of catastrophic forgetting, where the attention to previously learned visual concepts shifts significantly after learning new tasks. Inspired by neuroscientific insights into the selective attention in the human visual system, we propose a novel attention-retaining framework to mitigate forgetting in CL. Our method constrains attention drift by explicitly modifying gradients during backpropagation through a two-step process: 1) extracting attention maps of the previous task using a layer-wise rollout mechanism and generating instance-adaptive binary masks, and 2) when learning a new task, applying these masks to zero out gradients associated with previous attention regions, thereby preventing disruption of learned visual concepts. For compatibility with modern optimizers, the gradient masking process is further enhanced by scaling parameter updates proportionally to maintain their relative magnitudes. Experiments and visualizations demonstrate the effectiveness of our method in mitigating catastrophic forgetting and preserving visual concepts. It achieves state-of-the-art performance and exhibits robust generalizability across diverse CL scenarios.
YOLO-IOD: Towards Real Time Incremental Object Detection
Dec 28, 2025Current methods for incremental object detection (IOD) primarily rely on Faster R-CNN or DETR series detectors; however, these approaches do not accommodate the real-time YOLO detection frameworks. In this paper, we first identify three primary types of knowledge conflicts that contribute to catastrophic forgetting in YOLO-based incremental detectors: foreground-background confusion, parameter interference, and misaligned knowledge distillation. Subsequently, we introduce YOLO-IOD, a real-time Incremental Object Detection (IOD) framework that is constructed upon the pretrained YOLO-World model, facilitating incremental learning via a stage-wise parameter-efficient fine-tuning process. Specifically, YOLO-IOD encompasses three principal components: 1) Conflict-Aware Pseudo-Label Refinement (CPR), which mitigates the foreground-background confusion by leveraging the confidence levels of pseudo labels and identifying potential objects relevant to future tasks. 2) Importancebased Kernel Selection (IKS), which identifies and updates the pivotal convolution kernels pertinent to the current task during the current learning stage. 3) Cross-Stage Asymmetric Knowledge Distillation (CAKD), which addresses the misaligned knowledge distillation conflict by transmitting the features of the student target detector through the detection heads of both the previous and current teacher detectors, thereby facilitating asymmetric distillation between existing and newly introduced categories. We further introduce LoCo COCO, a more realistic benchmark that eliminates data leakage across stages. Experiments on both conventional and LoCo COCO benchmarks show that YOLO-IOD achieves superior performance with minimal forgetting.
On Modality Incomplete Infrared-Visible Object Detection: An Architecture Compatibility Perspective
Nov 09, 2025Infrared and visible object detection (IVOD) is essential for numerous around-the-clock applications. Despite notable advancements, current IVOD models exhibit notable performance declines when confronted with incomplete modality data, particularly if the dominant modality is missing. In this paper, we take a thorough investigation on modality incomplete IVOD problem from an architecture compatibility perspective. Specifically, we propose a plug-and-play Scarf Neck module for DETR variants, which introduces a modality-agnostic deformable attention mechanism to enable the IVOD detector to flexibly adapt to any single or double modalities during training and inference. When training Scarf-DETR, we design a pseudo modality dropout strategy to fully utilize the multi-modality information, making the detector compatible and robust to both working modes of single and double modalities. Moreover, we introduce a comprehensive benchmark for the modality-incomplete IVOD task aimed at thoroughly assessing situations where the absent modality is either dominant or secondary. Our proposed Scarf-DETR not only performs excellently in missing modality scenarios but also achieves superior performances on the standard IVOD modality complete benchmarks. Our code will be available at https://github.com/YinghuiXing/Scarf-DETR.
Multi-level Collaborative Distillation Meets Global Workspace Model: A Unified Framework for OCIL
Aug 12, 2025Online Class-Incremental Learning (OCIL) enables models to learn continuously from non-i.i.d. data streams and samples of the data streams can be seen only once, making it more suitable for real-world scenarios compared to offline learning. However, OCIL faces two key challenges: maintaining model stability under strict memory constraints and ensuring adaptability to new tasks. Under stricter memory constraints, current replay-based methods are less effective. While ensemble methods improve adaptability (plasticity), they often struggle with stability. To overcome these challenges, we propose a novel approach that enhances ensemble learning through a Global Workspace Model (GWM)-a shared, implicit memory that guides the learning of multiple student models. The GWM is formed by fusing the parameters of all students within each training batch, capturing the historical learning trajectory and serving as a dynamic anchor for knowledge consolidation. This fused model is then redistributed periodically to the students to stabilize learning and promote cross-task consistency. In addition, we introduce a multi-level collaborative distillation mechanism. This approach enforces peer-to-peer consistency among students and preserves historical knowledge by aligning each student with the GWM. As a result, student models remain adaptable to new tasks while maintaining previously learned knowledge, striking a better balance between stability and plasticity. Extensive experiments on three standard OCIL benchmarks show that our method delivers significant performance improvement for several OCIL models across various memory budgets.
Adaptive Spatial Augmentation for Semi-supervised Semantic Segmentation
May 29, 2025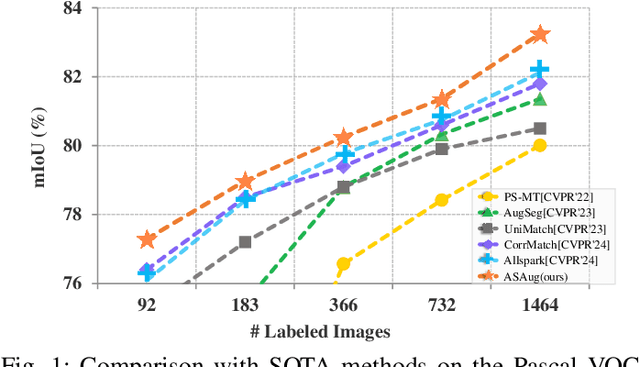
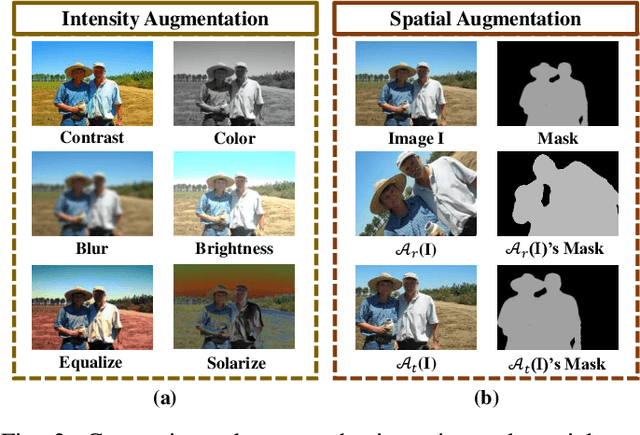
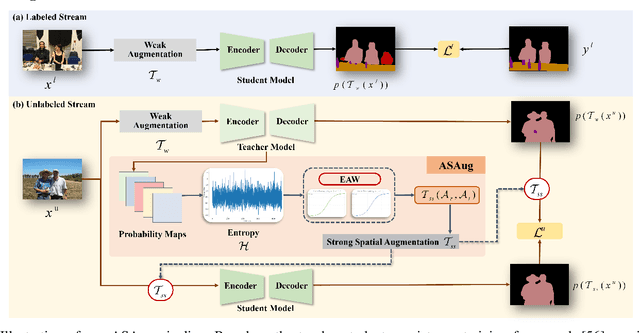
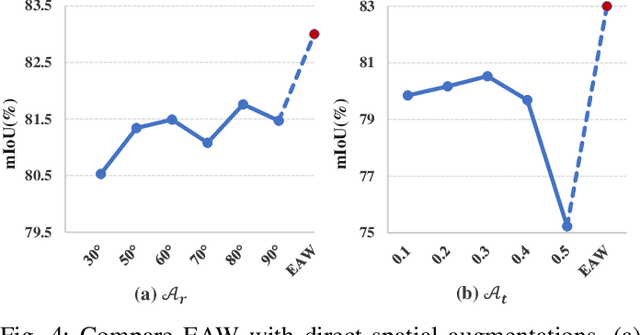
In semi-supervised semantic segmentation (SSSS), data augmentation plays a crucial role in the weak-to-strong consistency regularization framework, as it enhances diversity and improves model generalization. Recent strong augmentation methods have primarily focused on intensity-based perturbations, which have minimal impact on the semantic masks. In contrast, spatial augmentations like translation and rotation have long been acknowledged for their effectiveness in supervised semantic segmentation tasks, but they are often ignored in SSSS. In this work, we demonstrate that spatial augmentation can also contribute to model training in SSSS, despite generating inconsistent masks between the weak and strong augmentations. Furthermore, recognizing the variability among images, we propose an adaptive augmentation strategy that dynamically adjusts the augmentation for each instance based on entropy. Extensive experiments show that our proposed Adaptive Spatial Augmentation (\textbf{ASAug}) can be integrated as a pluggable module, consistently improving the performance of existing methods and achieving state-of-the-art results on benchmark datasets such as PASCAL VOC 2012, Cityscapes, and COCO.
Demystifying Catastrophic Forgetting in Two-Stage Incremental Object Detector
Feb 08, 2025Catastrophic forgetting is a critical chanllenge for incremental object detection (IOD). Most existing methods treat the detector monolithically, relying on instance replay or knowledge distillation without analyzing component-specific forgetting. Through dissection of Faster R-CNN, we reveal a key insight: Catastrophic forgetting is predominantly localized to the RoI Head classifier, while regressors retain robustness across incremental stages. This finding challenges conventional assumptions, motivating us to develop a framework termed NSGP-RePRE. Regional Prototype Replay (RePRE) mitigates classifier forgetting via replay of two types of prototypes: coarse prototypes represent class-wise semantic centers of RoI features, while fine-grained prototypes model intra-class variations. Null Space Gradient Projection (NSGP) is further introduced to eliminate prototype-feature misalignment by updating the feature extractor in directions orthogonal to subspace of old inputs via gradient projection, aligning RePRE with incremental learning dynamics. Our simple yet effective design allows NSGP-RePRE to achieve state-of-the-art performance on the Pascal VOC and MS COCO datasets under various settings. Our work not only advances IOD methodology but also provide pivotal insights for catastrophic forgetting mitigation in IOD. Code will be available soon.
ComprehendEdit: A Comprehensive Dataset and Evaluation Framework for Multimodal Knowledge Editing
Dec 17, 2024



Large multimodal language models (MLLMs) have revolutionized natural language processing and visual understanding, but often contain outdated or inaccurate information. Current multimodal knowledge editing evaluations are limited in scope and potentially biased, focusing on narrow tasks and failing to assess the impact on in-domain samples. To address these issues, we introduce ComprehendEdit, a comprehensive benchmark comprising eight diverse tasks from multiple datasets. We propose two novel metrics: Knowledge Generalization Index (KGI) and Knowledge Preservation Index (KPI), which evaluate editing effects on in-domain samples without relying on AI-synthetic samples. Based on insights from our framework, we establish Hierarchical In-Context Editing (HICE), a baseline method employing a two-stage approach that balances performance across all metrics. This study provides a more comprehensive evaluation framework for multimodal knowledge editing, reveals unique challenges in this field, and offers a baseline method demonstrating improved performance. Our work opens new perspectives for future research and provides a foundation for developing more robust and effective editing techniques for MLLMs. The ComprehendEdit benchmark and implementation code are available at https://github.com/yaohui120/ComprehendEdit.
Mamba-CL: Optimizing Selective State Space Model in Null Space for Continual Learning
Nov 23, 2024



Continual Learning (CL) aims to equip AI models with the ability to learn a sequence of tasks over time, without forgetting previously learned knowledge. Recently, State Space Models (SSMs), particularly the Mamba model, have achieved notable success in computer vision. Building on the strengths of SSMs, this study explores leveraging the Mamba model for CL. Therefore, we introduce Mamba-CL, a framework that continuously fine-tunes the core SSMs of the large-scale Mamba foundation model by updating parameters orthogonal to the feature subspace of previous tasks. This approach theoretically guarantees the consistency objective aiming to preserves consistent output for each SSM module across both previous and current tasks, so as to overcome catastrophic forgetting issue. Specifically, we achieve this goal by deducing the overall consistency constraints on four key time-invariant parameters in the Mamba model, streamlining its recurrent state-space structure and non-linear discretization process in SSM. In practice, we apply the null-space projection to efficiently implement the orthogonality within Mamba model. Extensive experiments on four class-incremental benchmarks demonstrate the effectiveness of Mamba-CL for anti-forgetting, achieving superior performances to state-of-the-art methods. Code is available in the supplementary materials.