 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dual-stage Prompt-driven Privacy-preserving Paradigm for Person Re-Identification
Nov 07, 2025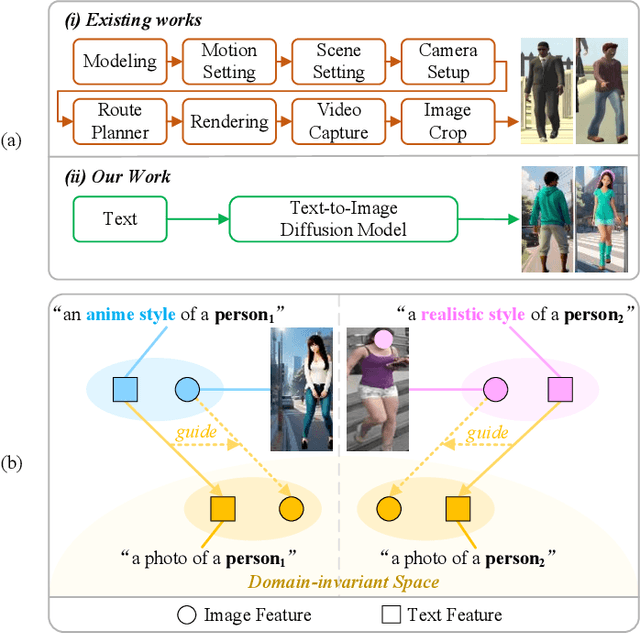
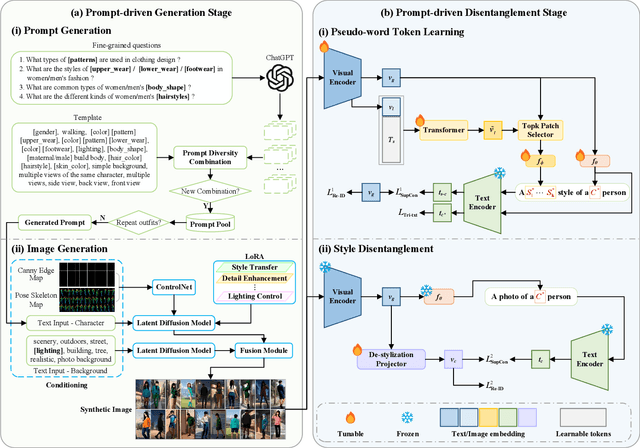
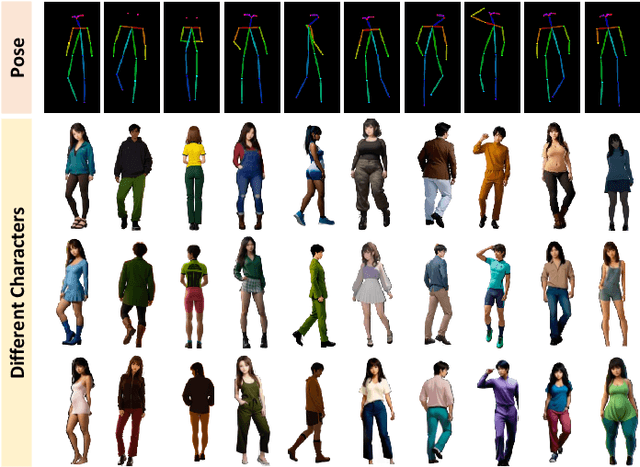

With growing concerns over data privacy, researchers have started using virtual data as an alternative to sensitive real-world images for training person re-identification (Re-ID) models. However, existing virtual datasets produced by game engines still face challenges such as complex construction and poor domain generalization, making them difficult to apply in real scenarios. To address these challenges, we propose a Dual-stage Prompt-driven Privacy-preserving Paradigm (DPPP). In the first stage, we generate rich prompts incorporating multi-dimensional attributes such as pedestrian appearance, illumination, and viewpoint that drive the diffusion model to synthesize diverse data end-to-end, building a large-scale virtual dataset named GenePerson with 130,519 images of 6,641 identities. In the second stage, we propose a Prompt-driven Disentanglement Mechanism (PDM) to learn domain-invariant generalization features. With the aid of contrastive learning, we employ two textual inversion networks to map images into pseudo-words representing style and content, respectively, thereby constructing style-disentangled content prompts to guide the model in learning domain-invariant content features at the image level. Experiments demonstrate that models trained on GenePerson with PDM achieve state-of-the-art generalization performance, surpassing those on popular real and virtual Re-ID datasets.
Graph2text or Graph2token: A Perspective of Large Language Models for Graph Learning
Jan 02, 2025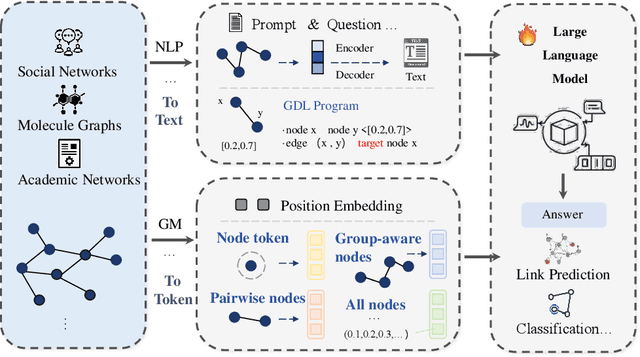
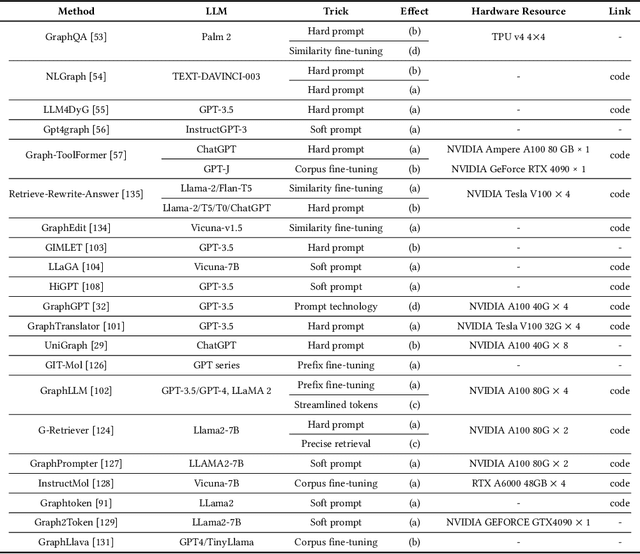
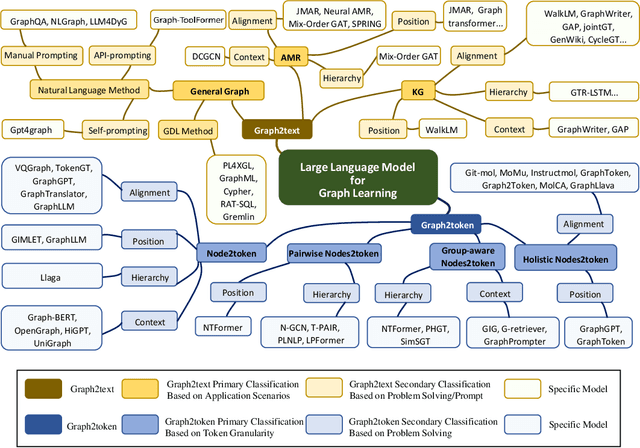
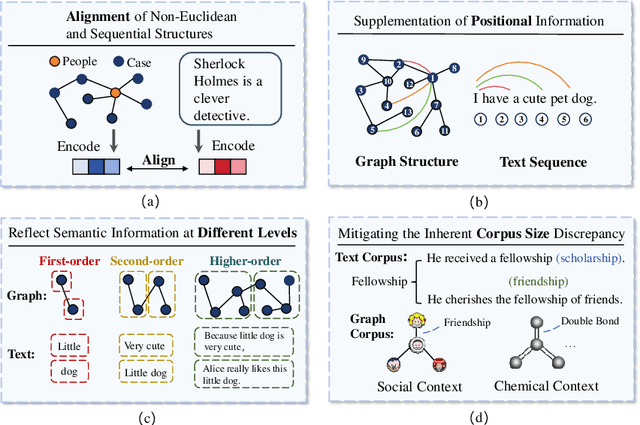
Graphs are data structures used to represent irregular networks and are prevalent in numerous real-world applications. Previous methods directly model graph structures and achieve significant success. However, these methods encounter bottlenecks due to the inherent irregularity of graphs. An innovative solution is converting graphs into textual representations, thereby harnessing the powerful capabilities of Large Language Models (LLMs) to process and comprehend graphs. In this paper, we present a comprehensive review of methodologies for applying LLMs to graphs, termed LLM4graph. The core of LLM4graph lies in transforming graphs into texts for LLMs to understand and analyze. Thus, we propose a novel taxonomy of LLM4graph methods in the view of the transformation. Specifically, existing methods can be divided into two paradigms: Graph2text and Graph2token, which transform graphs into texts or tokens as the input of LLMs, respectively. We point out four challenges during the transformation to systematically present existing methods in a problem-oriented perspective. For practical concerns, we provide a guideline for researchers on selecting appropriate models and LLMs for different graphs and hardware constraints. We also identify five future research directions for LLM4graph.
Performance assessment of ADAS in a representative subset of critical traffic situations
Sep 25, 2024As a variety of automated collision prevention systems gain presence within personal vehicles, rating and differentiating the automated safety performance of car models has become increasingly important for consumers, manufacturers, and insurers. In 2023, Swiss Re and partners initiated an eight-month long vehicle testing campaign conducted on a recognized UNECE type approval authority and Euro NCAP accredited proving ground in Germany. The campaign exposed twelve mass-produced vehicle models and one prototype vehicle fitted with collision prevention systems to a selection of safety-critical traffic scenarios representative of United States and European Union accident landscape. In this paper, we compare and evaluate the relative safety performance of these thirteen collision prevention systems (hardware and software stack) as demonstrated by this testing campaign. We first introduce a new scoring system which represents a test system's predicted impact on overall real-world collision frequency and reduction of collision impact energy, weighted based on the real-world relevance of the test scenario. Next, we introduce a novel metric that quantifies the realism of the protocol and confirm that our test protocol is a plausible representation of real-world driving. Finally, we find that the prototype system in its pre-release state outperforms the mass-produced (post-consumer-release) vehicles in the majority of the tested scenarios on the test track.
Realistic Extreme Behavior Generation for Improved AV Testing
Sep 16, 2024This work introduces a framework to diagnose the strengths and shortcomings of Autonomous Vehicle (AV) collision avoidance technology with synthetic yet realistic potential collision scenarios adapted from real-world, collision-free data. Our framework generates counterfactual collisions with diverse crash properties, e.g., crash angle and velocity, between an adversary and a target vehicle by adding perturbations to the adversary's predicted trajectory from a learned AV behavior model. Our main contribution is to ground these adversarial perturbations in realistic behavior as defined through the lens of data-alignment in the behavior model's parameter space. Then, we cluster these synthetic counterfactuals to identify plausible and representative collision scenarios to form the basis of a test suite for downstream AV system evaluation. We demonstrate our framework using two state-of-the-art behavior prediction models as sources of realistic adversarial perturbations, and show that our scenario clustering evokes interpretable failure modes from a baseline AV policy under evaluation.
Micro-Expression Recognition by Motion Feature Extraction based on Pre-training
Jul 10, 2024

Micro-expressions (MEs) are spontaneous, unconscious facial expressions that have promising applications in various fields such as psychotherapy and national security. Thus, micro-expression recognition (MER) has attracted more and more attention from researchers. Although various MER methods have emerged especially with the development of deep learning techniques, the task still faces several challenges, e.g. subtle motion and limited training data. To address these problems, we propose a novel motion extraction strategy (MoExt) for the MER task and use additional macro-expression data in the pre-training process. We primarily pretrain the feature separator and motion extractor using the contrastive loss, thus enabling them to extract representative motion features. In MoExt, shape features and texture features are first extracted separately from onset and apex frames, and then motion features related to MEs are extracted based on the shape features of both frames. To enable the model to more effectively separate features, we utilize the extracted motion features and the texture features from the onset frame to reconstruct the apex frame. Through pre-training, the module is enabled to extract inter-frame motion features of facial expressions while excluding irrelevant information. The feature separator and motion extractor are ultimately integrated into the MER network, which is then fine-tuned using the target ME data. The effectiveness of proposed method is validated on three commonly used datasets, i.e., CASME II, SMIC, SAMM, and CAS(ME)3 dataset. The results show that our method performs favorably against state-of-the-art methods.
Large Language Models for Mobility in Transportation Systems: A Survey on Forecasting Tasks
May 03, 2024

Mobility analysis is a crucial element in the research area of transportation systems. Forecasting traffic information offers a viable solution to address the conflict between increasing transportation demands and the limitations of transportation infrastructure. Predicting human travel is significant in aiding various transportation and urban management tasks, such as taxi dispatch and urban planning. Machine learning and deep learning methods are favored for their flexibility and accuracy. Nowadays, with the advent of large language models (LLMs), many researchers have combined these models with previous techniques or applied LLMs to directly predict future traffic information and human travel behaviors. However, there is a lack of comprehensive studies on how LLMs can contribute to this field. This survey explores existing approaches using LLMs for mobility forecasting problems. We provide a literature review concerning the forecasting applications within transportation systems, elucidating how researchers utilize LLMs, showcasing recent state-of-the-art advancements, and identifying the challenges that must be overcome to fully leverage LLMs in this domain.
A Simple Structure For Building A Robust Model
Apr 25, 2022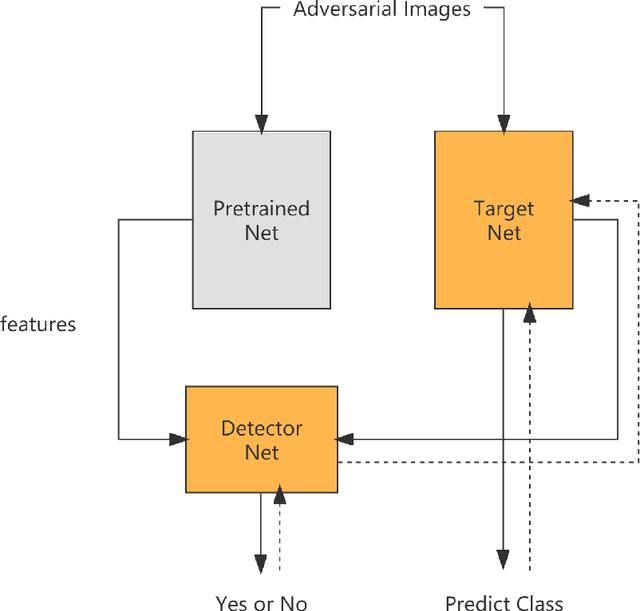

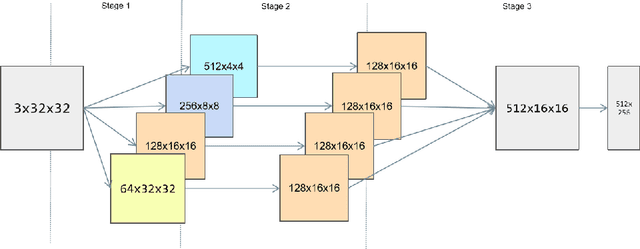

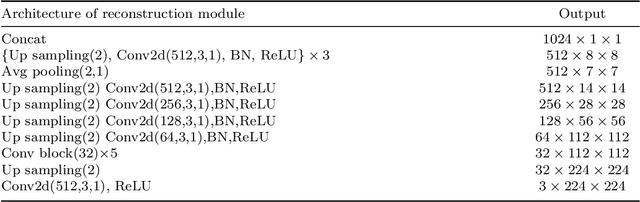
As deep learning applications, especially programs of computer vision, are increasingly deployed in our lives, we have to think more urgently about the security of these applications.One effective way to improve the security of deep learning models is to perform adversarial training, which allows the model to be compatible with samples that are deliberately created for use in attacking the model.Based on this, we propose a simple architecture to build a model with a certain degree of robustness, which improves the robustness of the trained network by adding an adversarial sample detection network for cooperative training.At the same time, we design a new data sampling strategy that incorporates multiple existing attacks, allowing the model to adapt to many different adversarial attacks with a single training.We conducted some experiments to test the effectiveness of this design based on Cifar10 dataset, and the results indicate that it has some degree of positive effect on the robustness of the model.Our code could be found at https://github.com/dowdyboy/simple_structure_for_robust_model.