 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNetwork-Level Vehicle Delay Estimation at Heterogeneous Signalized Intersections
Oct 01, 2025Accurate vehicle delay estimation is essential for evaluating the performance of signalized intersections and informing traffic management strategies. Delay reflects congestion levels and affects travel time reliability, fuel use, and emissions. Machine learning (ML) offers a scalable, cost-effective alternative; However, conventional models typically assume that training and testing data follow the same distribution, an assumption that is rarely satisfied in real-world applications. Variations in road geometry, signal timing, and driver behavior across intersections often lead to poor generalization and reduced model accuracy. To address this issue, this study introduces a domain adaptation (DA) framework for estimating vehicle delays across diverse intersections. The framework separates data into source and target domains, extracts key traffic features, and fine-tunes the model using a small, labeled subset from the target domain. A novel DA model, Gradient Boosting with Balanced Weighting (GBBW), reweights source data based on similarity to the target domain, improving adaptability. The framework is tested using data from 57 heterogeneous intersections in Pima County, Arizona. Performance is evaluated against eight state-of-the-art ML regression models and seven instance-based DA methods. Results demonstrate that the GBBW framework provides more accurate and robust delay estimates. This approach supports more reliable traffic signal optimization, congestion management, and performance-based planning. By enhancing model transferability, the framework facilitates broader deployment of machine learning techniques in real-world transportation systems.
Domain Adaptation Framework for Turning Movement Count Estimation with Limited Data
Mar 25, 2025Urban transportation networks are vital for the efficient movement of people and goods, necessitating effective traffic management and planning. An integral part of traffic management is understanding the turning movement counts (TMCs) at intersections, Accurate TMCs at intersections are crucial for traffic signal control, congestion mitigation, and road safety. In general, TMCs are obtained using physical sensors installed at intersections, but this approach can be cost-prohibitive and technically challenging, especially for cities with extensive road networks. Recent advancements in machine learning and data-driven approaches have offered promising alternatives for estimating TMCs. Traffic patterns can vary significantly across different intersections due to factors such as road geometry, traffic signal settings, and local driver behaviors. This domain discrepancy limits the generalizability and accuracy of machine learning models when applied to new or unseen intersections. In response to these limitations, this research proposes a novel framework leveraging domain adaptation (DA) to estimate TMCs at intersections by using traffic controller event-based data, road infrastructure data, and point-of-interest (POI) data. Evaluated on 30 intersections in Tucson, Arizona, the performance of the proposed DA framework was compared with state-of-the-art models and achieved the lowest values in terms of Mean Absolute Error and Root Mean Square Error.
Data-Driven Transfer Learning Framework for Estimating Turning Movement Counts
Dec 13, 2024Urban transportation networks are vital for the efficient movement of people and goods, necessitating effective traffic management and planning. An integral part of traffic management is understanding the turning movement counts (TMCs) at intersections, Accurate TMCs at intersections are crucial for traffic signal control, congestion mitigation, and road safety. In general, TMCs are obtained using physical sensors installed at intersections, but this approach can be cost-prohibitive and technically challenging, especially for cities with extensive road networks. Recent advancements in machine learning and data-driven approaches have offered promising alternatives for estimating TMCs. Traffic patterns can vary significantly across different intersections due to factors such as road geometry, traffic signal settings, and local driver behaviors. This domain discrepancy limits the generalizability and accuracy of machine learning models when applied to new or unseen intersections. In response to these limitations, this research proposes a novel framework leveraging transfer learning (TL) to estimate TMCs at intersections by using traffic controller event-based data, road infrastructure data, and point-of-interest (POI) data. Evaluated on 30 intersections in Tucson, Arizona, the performance of the proposed TL model was compared with eight state-of-the-art regression models and achieved the lowest values in terms of Mean Absolute Error and Root Mean Square Error.
Uncertainty-Aware Crime Prediction With Spatial Temporal Multivariate Graph Neural Networks
Aug 08, 2024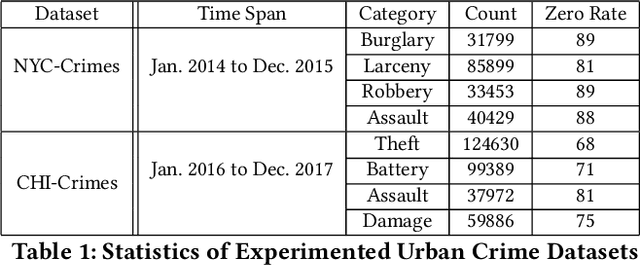
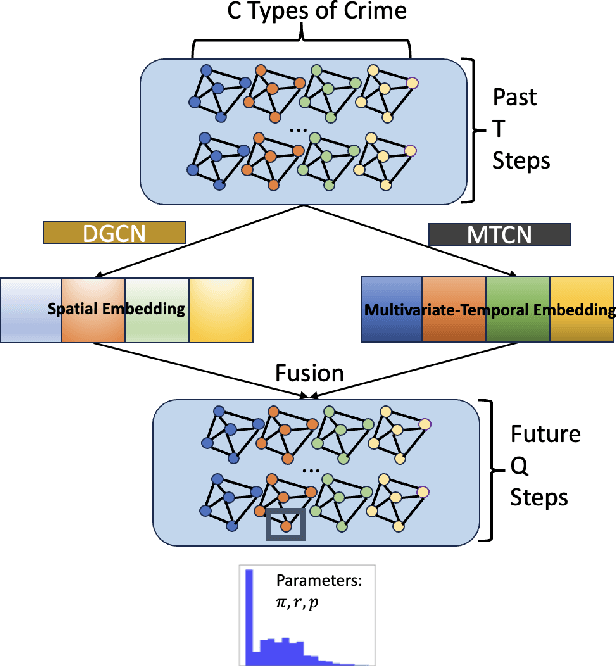
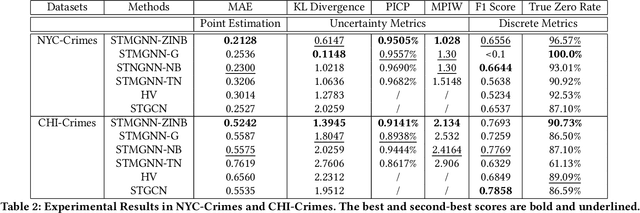
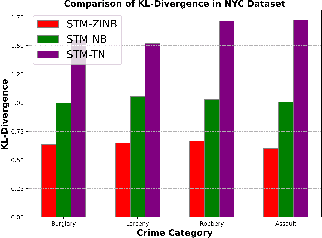
Crime forecasting is a critical component of urban analysis and essential for stabilizing society today. Unlike other time series forecasting problems, crime incidents are sparse, particularly in small regions and within specific time periods. Traditional spatial-temporal deep learning models often struggle with this sparsity, as they typically cannot effectively handle the non-Gaussian nature of crime data, which is characterized by numerous zeros and over-dispersed patterns. To address these challenges, we introduce a novel approach termed Spatial Temporal Multivariate Zero-Inflated Negative Binomial Graph Neural Networks (STMGNN-ZINB). This framework leverages diffusion and convolution networks to analyze spatial, temporal, and multivariate correlations, enabling the parameterization of probabilistic distributions of crime incidents. By incorporating a Zero-Inflated Negative Binomial model, STMGNN-ZINB effectively manages the sparse nature of crime data, enhancing prediction accuracy and the precision of confidence intervals. Our evaluation on real-world datasets confirms that STMGNN-ZINB outperforms existing models, providing a more reliable tool for predicting and understanding crime dynamics.
Large Language Models for Mobility in Transportation Systems: A Survey on Forecasting Tasks
May 03, 2024

Mobility analysis is a crucial element in the research area of transportation systems. Forecasting traffic information offers a viable solution to address the conflict between increasing transportation demands and the limitations of transportation infrastructure. Predicting human travel is significant in aiding various transportation and urban management tasks, such as taxi dispatch and urban planning. Machine learning and deep learning methods are favored for their flexibility and accuracy. Nowadays, with the advent of large language models (LLMs), many researchers have combined these models with previous techniques or applied LLMs to directly predict future traffic information and human travel behaviors. However, there is a lack of comprehensive studies on how LLMs can contribute to this field. This survey explores existing approaches using LLMs for mobility forecasting problems. We provide a literature review concerning the forecasting applications within transportation systems, elucidating how researchers utilize LLMs, showcasing recent state-of-the-art advancements, and identifying the challenges that must be overcome to fully leverage LLMs in this domain.
TrafficGPT: Breaking the Token Barrier for Efficient Long Traffic Analysis and Generation
Mar 09, 2024



Over the years, network traffic analysis and generation have advanced significantly. From traditional statistical methods, the field has progressed to sophisticated deep learning techniques. This progress has improved the ability to detect complex patterns and security threats, as well as to test and optimize network performance. However, obstacles persist, such as the dependence on labeled data for analysis and the difficulty of generating traffic samples that follow realistic patterns. Pre-trained deep neural networks have emerged as powerful tools to resolve these issues, offering improved performance by learning robust data representations from large unlabeled datasets. Despite their benefits, existing pre-trained models face challenges like token length limitation, which restricts their usefulness in comprehensive traffic analysis and realistic traffic generation. To address these challenges, we introduce TrafficGPT, a deep learning model that can tackle complex challenges related to long flow classification and generation tasks. This model uses generative pre-training with the linear attention mechanism, which allows for a substantially increased capacity of up to 12,032 tokens from the previous limit of only 512 tokens. TrafficGPT demonstrates superior performance in classification tasks, reaching state-of-the-art levels. In generation tasks, it closely resembles real traffic flows, with low JS divergence and an F1 score close to 0.5 (representing a random guess) in discriminating generated data. These advancements hold promise for future applications in both traffic flow classification and generation tasks.
A Transfer Learning Framework for Proactive Ramp Metering Performance Assessment
Aug 07, 2023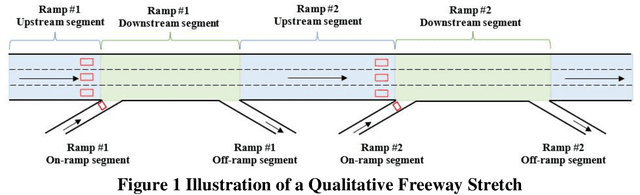

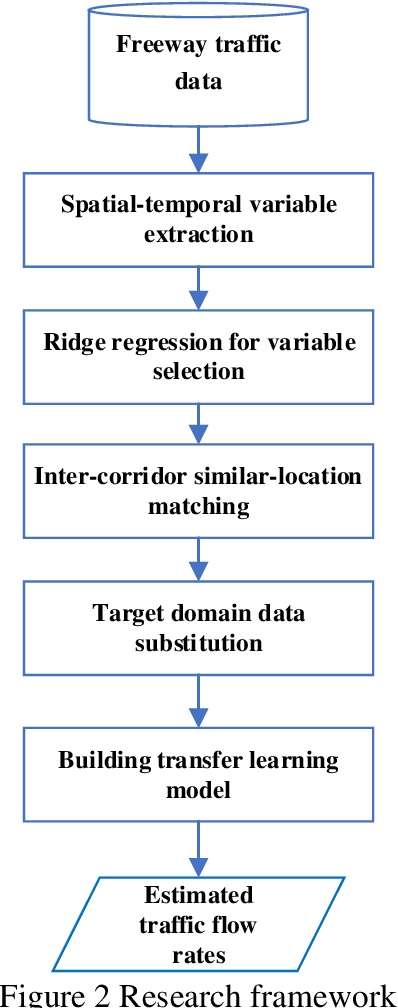
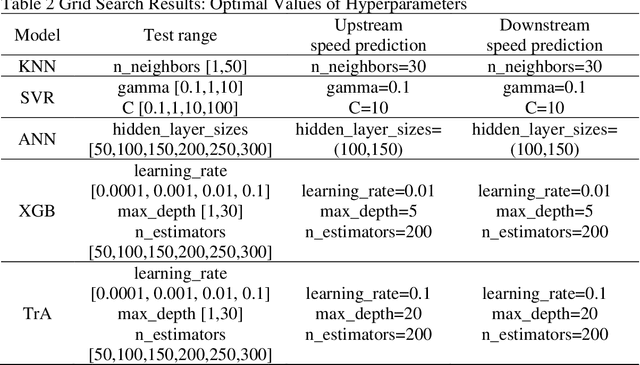
Transportation agencies need to assess ramp metering performance when deploying or expanding a ramp metering system. The evaluation of a ramp metering strategy is primarily centered around examining its impact on freeway traffic mobility. One way these effects can be explored is by comparing traffic states, such as the speed before and after the ramp metering strategy has been altered. Predicting freeway traffic states for the after scenarios following the implementation of a new ramp metering control strategy could offer valuable insights into the potential effectiveness of the target strategy. However, the use of machine learning methods in predicting the freeway traffic state for the after scenarios and evaluating the effectiveness of transportation policies or traffic control strategies such as ramp metering is somewhat limited in the current literature. To bridge the research gap, this study presents a framework for predicting freeway traffic parameters (speed, occupancy, and flow rate) for the after situations when a new ramp metering control strategy is implemented. By learning the association between the spatial-temporal features of traffic states in before and after situations for known freeway segments, the proposed framework can transfer this learning to predict the traffic parameters for new freeway segments. The proposed framework is built upon a transfer learning model. Experimental results show that the proposed framework is feasible for use as an alternative for predicting freeway traffic parameters to proactively evaluate ramp metering performance.
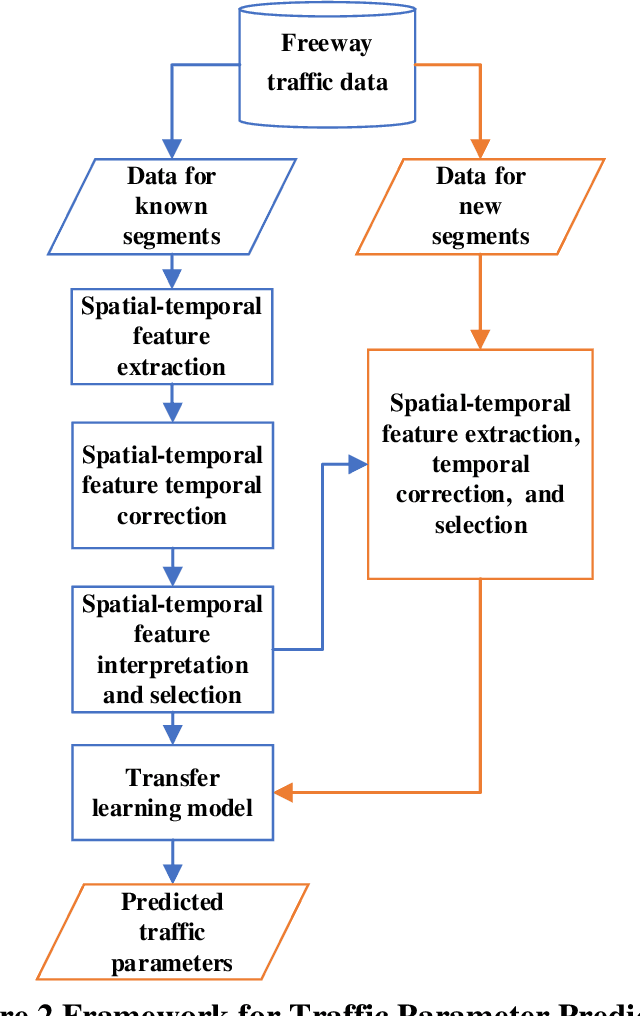
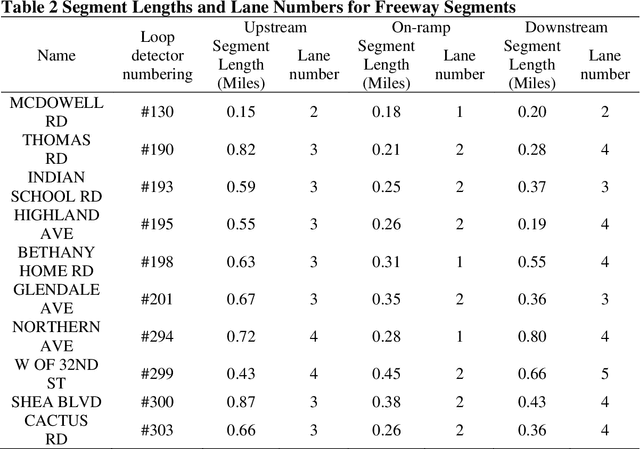
On-ramp and Off-ramp Traffic Flows Estimation Based on A Data-driven Transfer Learning Framework
Aug 07, 2023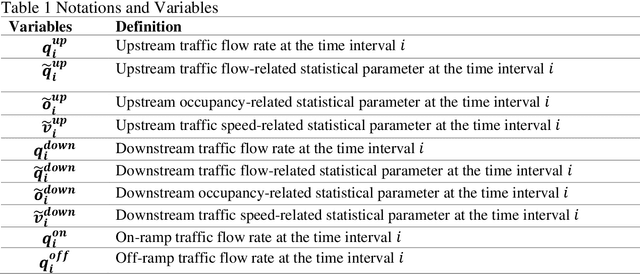
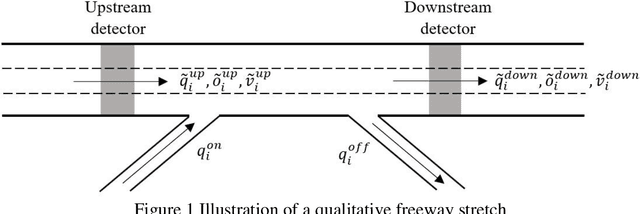
To develop the most appropriate control strategy and monitor, maintain, and evaluate the traffic performance of the freeway weaving areas, state and local Departments of Transportation need to have access to traffic flows at each pair of on-ramp and off-ramp. However, ramp flows are not always readily available to transportation agencies and little effort has been made to estimate these missing flows in locations where no physical sensors are installed. To bridge this research gap, a data-driven framework is proposed that can accurately estimate the missing ramp flows by solely using data collected from loop detectors on freeway mainlines. The proposed framework employs a transfer learning model. The transfer learning model relaxes the assumption that the underlying data distributions of the source and target domains must be the same. Therefore, the proposed framework can guarantee high-accuracy estimation of on-ramp and off-ramp flows on freeways with different traffic patterns, distributions, and characteristics. Based on the experimental results, the flow estimation mean absolute errors range between 23.90 veh/h to 40.85 veh/h for on-ramps, and 31.58 veh/h to 45.31 veh/h for off-ramps; the flow estimation root mean square errors range between 34.55 veh/h to 57.77 veh/h for on-ramps, and 41.75 veh/h to 58.80 veh/h for off-ramps. Further, the comparison analysis shows that the proposed framework outperforms other conventional machine learning models. The estimated ramp flows based on the proposed method can help transportation agencies to enhance the operations of their ramp control strategies for locations where physical sensors are not installed.
Vehicle Traffic Driven Camera Placement for Better Metropolis Security Surveillance
Aug 20, 2018
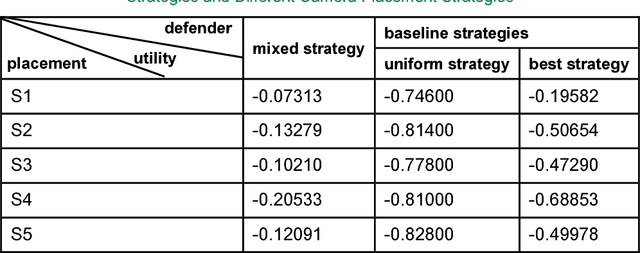
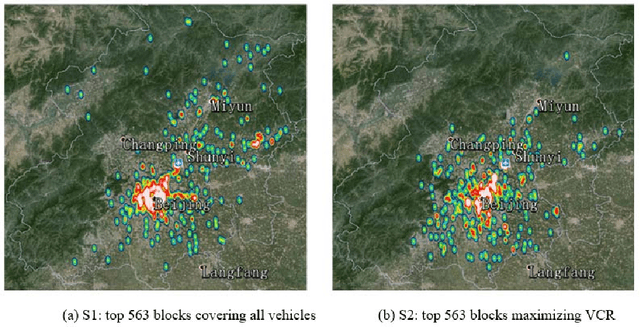
Security surveillance is one of the most important issues in smart cities, especially in an era of terrorism. Deploying a number of (video) cameras is a common surveillance approach. Given the never-ending power offered by vehicles to metropolises, exploiting vehicle traffic to design camera placement strategies could potentially facilitate security surveillance. This article constitutes the first effort toward building the linkage between vehicle traffic and security surveillance, which is a critical problem for smart cities. We expect our study could influence the decision making of surveillance camera placement, and foster more research of principled ways of security surveillance beneficial to our physical-world life. Code has been made publicly available.