 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Deep Learning Approach for Real-time Lane-based Arrival Curve Reconstruction at Intersection using License Plate Recognition Data
Nov 12, 2024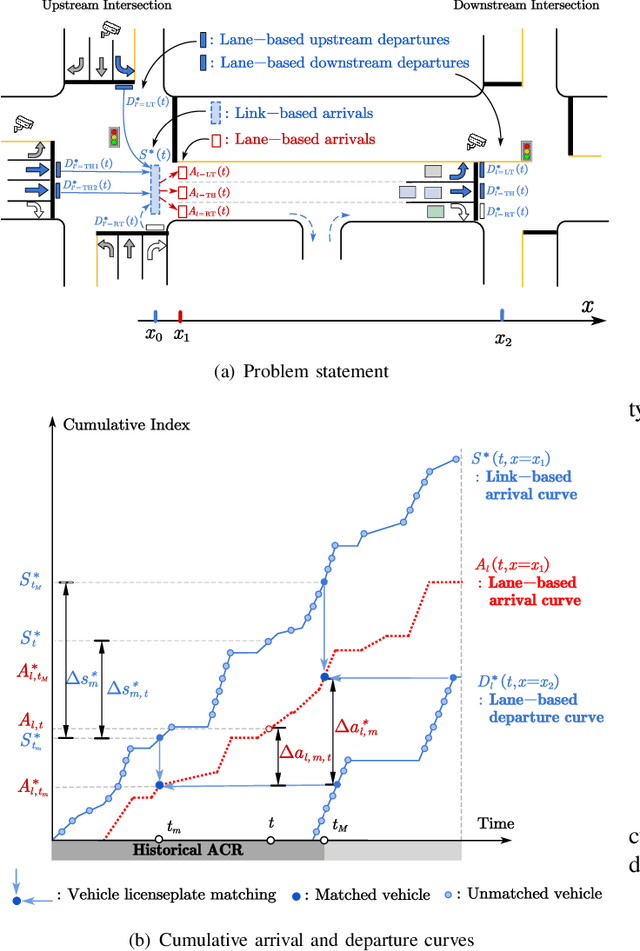
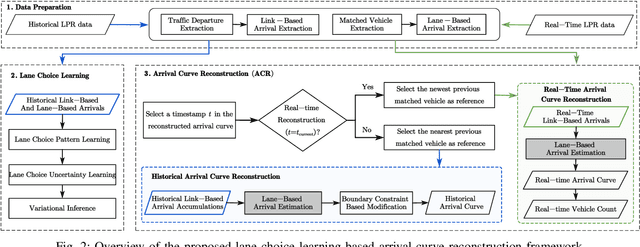
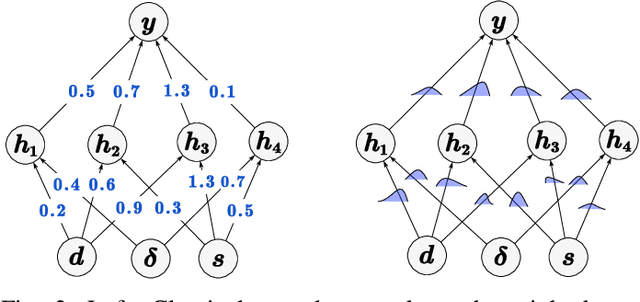
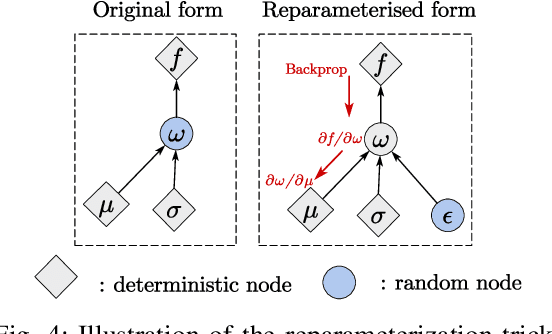
The acquisition of real-time and accurate traffic arrival information is of vital importance for proactive traffic control systems, especially in partially connected vehicle environments. License plate recognition (LPR) data that record both vehicle departures and identities are proven to be desirable in reconstructing lane-based arrival curves in previous works. Existing LPR databased methods are predominantly designed for reconstructing historical arrival curves. For real-time reconstruction of multi-lane urban roads, it is pivotal to determine the lane choice of real-time link-based arrivals, which has not been exploited in previous studies. In this study, we propose a Bayesian deep learning approach for real-time lane-based arrival curve reconstruction, in which the lane choice patterns and uncertainties of link-based arrivals are both characterized. Specifically, the learning process is designed to effectively capture the relationship between partially observed link-based arrivals and lane-based arrivals, which can be physically interpreted as lane choice proportion. Moreover, the lane choice uncertainties are characterized using Bayesian parameter inference techniques, minimizing arrival curve reconstruction uncertainties, especially in low LPR data matching rate conditions. Real-world experiment results conducted in multiple matching rate scenarios demonstrate the superiority and necessity of lane choice modeling in reconstructing arrival curves.
A Transfer Learning Framework for Proactive Ramp Metering Performance Assessment
Aug 07, 2023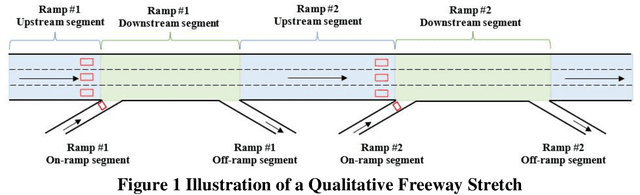
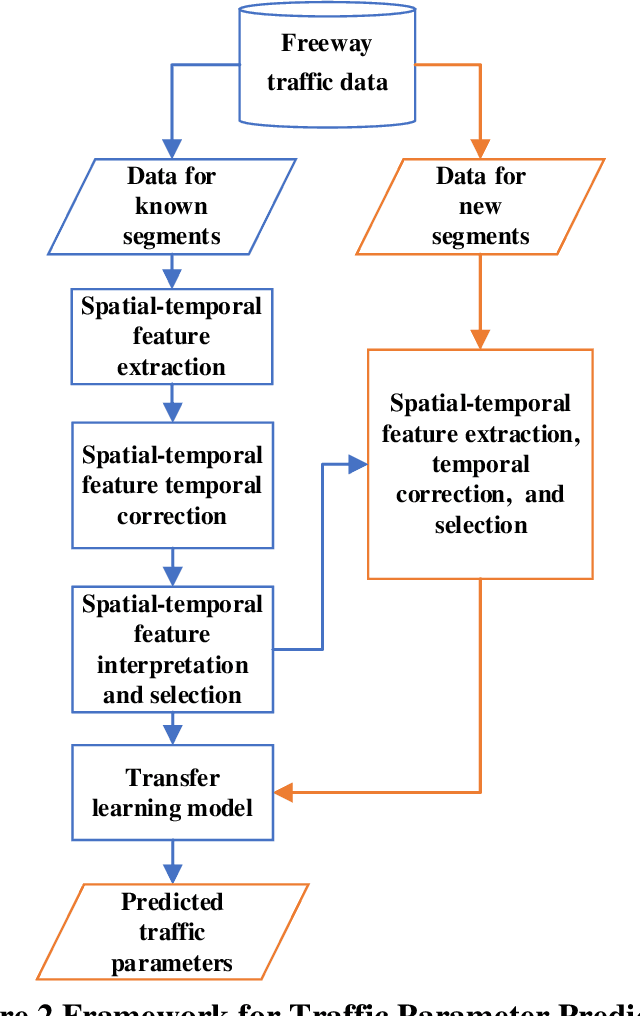

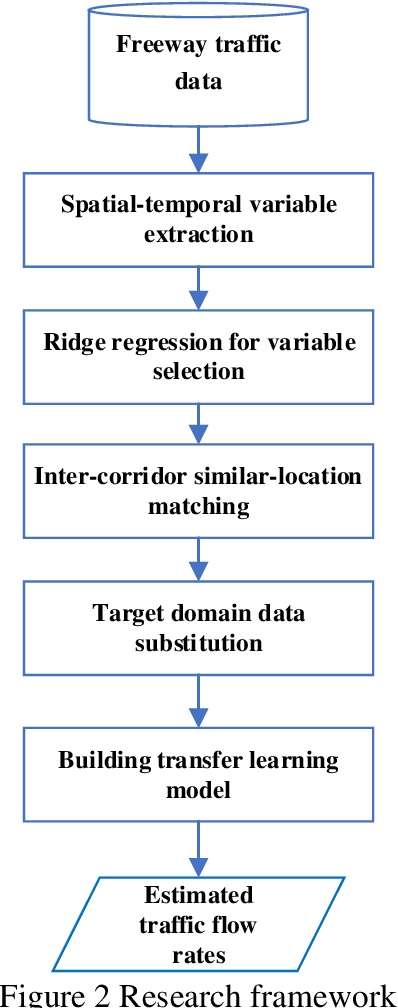
Transportation agencies need to assess ramp metering performance when deploying or expanding a ramp metering system. The evaluation of a ramp metering strategy is primarily centered around examining its impact on freeway traffic mobility. One way these effects can be explored is by comparing traffic states, such as the speed before and after the ramp metering strategy has been altered. Predicting freeway traffic states for the after scenarios following the implementation of a new ramp metering control strategy could offer valuable insights into the potential effectiveness of the target strategy. However, the use of machine learning methods in predicting the freeway traffic state for the after scenarios and evaluating the effectiveness of transportation policies or traffic control strategies such as ramp metering is somewhat limited in the current literature. To bridge the research gap, this study presents a framework for predicting freeway traffic parameters (speed, occupancy, and flow rate) for the after situations when a new ramp metering control strategy is implemented. By learning the association between the spatial-temporal features of traffic states in before and after situations for known freeway segments, the proposed framework can transfer this learning to predict the traffic parameters for new freeway segments. The proposed framework is built upon a transfer learning model. Experimental results show that the proposed framework is feasible for use as an alternative for predicting freeway traffic parameters to proactively evaluate ramp metering performance.
On-ramp and Off-ramp Traffic Flows Estimation Based on A Data-driven Transfer Learning Framework
Aug 07, 2023
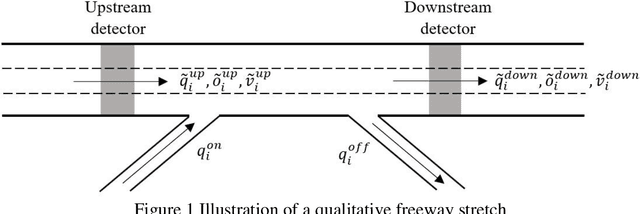
To develop the most appropriate control strategy and monitor, maintain, and evaluate the traffic performance of the freeway weaving areas, state and local Departments of Transportation need to have access to traffic flows at each pair of on-ramp and off-ramp. However, ramp flows are not always readily available to transportation agencies and little effort has been made to estimate these missing flows in locations where no physical sensors are installed. To bridge this research gap, a data-driven framework is proposed that can accurately estimate the missing ramp flows by solely using data collected from loop detectors on freeway mainlines. The proposed framework employs a transfer learning model. The transfer learning model relaxes the assumption that the underlying data distributions of the source and target domains must be the same. Therefore, the proposed framework can guarantee high-accuracy estimation of on-ramp and off-ramp flows on freeways with different traffic patterns, distributions, and characteristics. Based on the experimental results, the flow estimation mean absolute errors range between 23.90 veh/h to 40.85 veh/h for on-ramps, and 31.58 veh/h to 45.31 veh/h for off-ramps; the flow estimation root mean square errors range between 34.55 veh/h to 57.77 veh/h for on-ramps, and 41.75 veh/h to 58.80 veh/h for off-ramps. Further, the comparison analysis shows that the proposed framework outperforms other conventional machine learning models. The estimated ramp flows based on the proposed method can help transportation agencies to enhance the operations of their ramp control strategies for locations where physical sensors are not installed.