 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Deep Learning Approach for Real-time Lane-based Arrival Curve Reconstruction at Intersection using License Plate Recognition Data
Paper and Code
Nov 12, 2024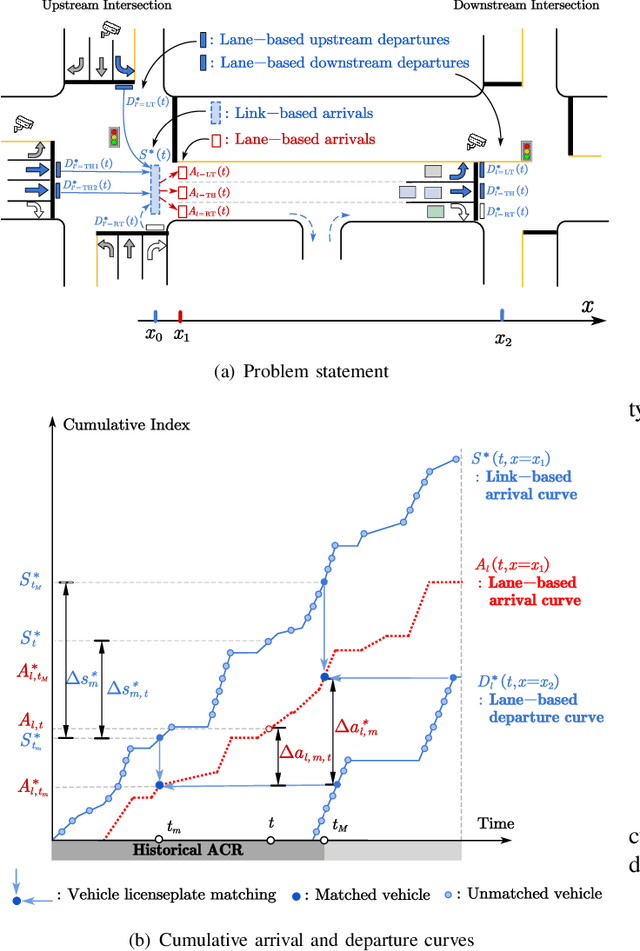
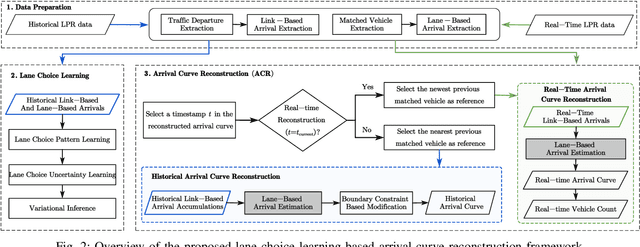
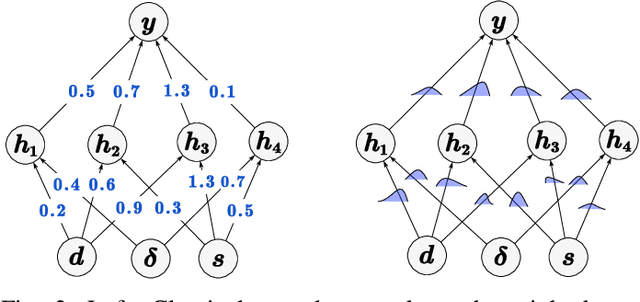
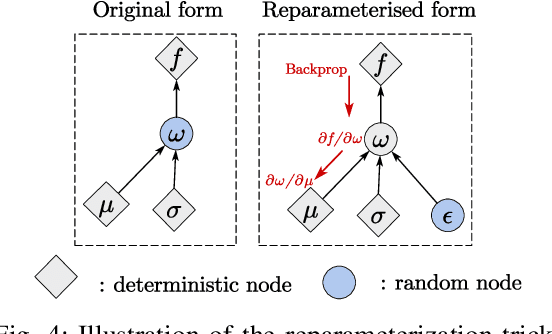
The acquisition of real-time and accurate traffic arrival information is of vital importance for proactive traffic control systems, especially in partially connected vehicle environments. License plate recognition (LPR) data that record both vehicle departures and identities are proven to be desirable in reconstructing lane-based arrival curves in previous works. Existing LPR databased methods are predominantly designed for reconstructing historical arrival curves. For real-time reconstruction of multi-lane urban roads, it is pivotal to determine the lane choice of real-time link-based arrivals, which has not been exploited in previous studies. In this study, we propose a Bayesian deep learning approach for real-time lane-based arrival curve reconstruction, in which the lane choice patterns and uncertainties of link-based arrivals are both characterized. Specifically, the learning process is designed to effectively capture the relationship between partially observed link-based arrivals and lane-based arrivals, which can be physically interpreted as lane choice proportion. Moreover, the lane choice uncertainties are characterized using Bayesian parameter inference techniques, minimizing arrival curve reconstruction uncertainties, especially in low LPR data matching rate conditions. Real-world experiment results conducted in multiple matching rate scenarios demonstrate the superiority and necessity of lane choice modeling in reconstructing arrival curves.