 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProCLIP: Progressive Vision-Language Alignment via LLM-based Embedder
Oct 22, 2025The original CLIP text encoder is limited by a maximum input length of 77 tokens, which hampers its ability to effectively process long texts and perform fine-grained semantic understanding. In addition, the CLIP text encoder lacks support for multilingual inputs. All these limitations significantly restrict its applicability across a broader range of tasks. Recent studies have attempted to replace the CLIP text encoder with an LLM-based embedder to enhance its ability in processing long texts, multilingual understanding, and fine-grained semantic comprehension. However, because the representation spaces of LLMs and the vision-language space of CLIP are pretrained independently without alignment priors, direct alignment using contrastive learning can disrupt the intrinsic vision-language alignment in the CLIP image encoder, leading to an underutilization of the knowledge acquired during pre-training. To address this challenge, we propose ProCLIP, a curriculum learning-based progressive vision-language alignment framework to effectively align the CLIP image encoder with an LLM-based embedder. Specifically, ProCLIP first distills knowledge from CLIP's text encoder into the LLM-based embedder to leverage CLIP's rich pretrained knowledge while establishing initial alignment between the LLM embedder and CLIP image encoder. Subsequently, ProCLIP further aligns the CLIP image encoder with the LLM-based embedder through image-text contrastive tuning, employing self-distillation regularization to avoid overfitting. To achieve a more effective alignment, instance semantic alignment loss and embedding structure alignment loss are employed during representation inheritance and contrastive tuning. The Code is available at https://github.com/VisionXLab/ProCLIP.
OsmLocator: locating overlapping scatter marks with a non-training generative perspective
Dec 22, 2023Automated mark localization in scatter images, greatly helpful for discovering knowledge and understanding enormous document images and reasoning in visual question answering AI systems, is a highly challenging problem because of the ubiquity of overlapping marks. Locating overlapping marks faces many difficulties such as no texture, less contextual information, hallow shape and tiny size. Here, we formulate it as a combinatorial optimization problem on clustering-based re-visualization from a non-training generative perspective, to locate scatter marks by finding the status of multi-variables when an objective function reaches a minimum. The objective function is constructed on difference between binarized scatter images and corresponding generated re-visualization based on their clustering. Fundamentally, re-visualization tries to generate a new scatter graph only taking a rasterized scatter image as an input, and clustering is employed to provide the information for such re-visualization. This method could stably locate severely-overlapping, variable-size and variable-shape marks in scatter images without dependence of any training dataset or reference. Meanwhile, we propose an adaptive variant of simulated annealing which can works on various connected regions. In addition, we especially built a dataset named SML2023 containing hundreds of scatter images with different markers and various levels of overlapping severity, and tested the proposed method and compared it to existing methods. The results show that it can accurately locate most marks in scatter images with different overlapping severity and marker types, with about 0.3 absolute increase on an assignment-cost-based metric in comparison with state-of-the-art methods. This work is of value to data mining on massive web pages and literatures, and shedding new light on image measurement such as bubble counting.
Oriented Feature Alignment for Fine-grained Object Recognition in High-Resolution Satellite Imagery
Oct 13, 2021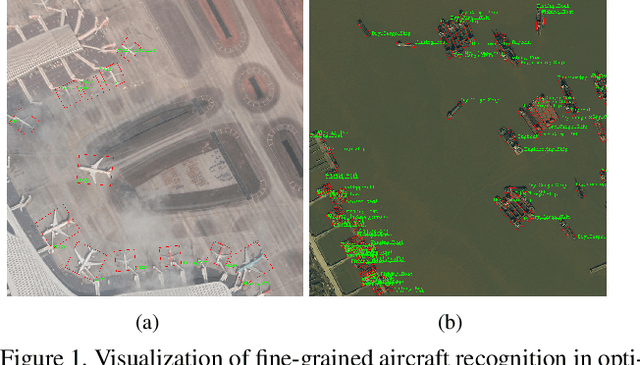
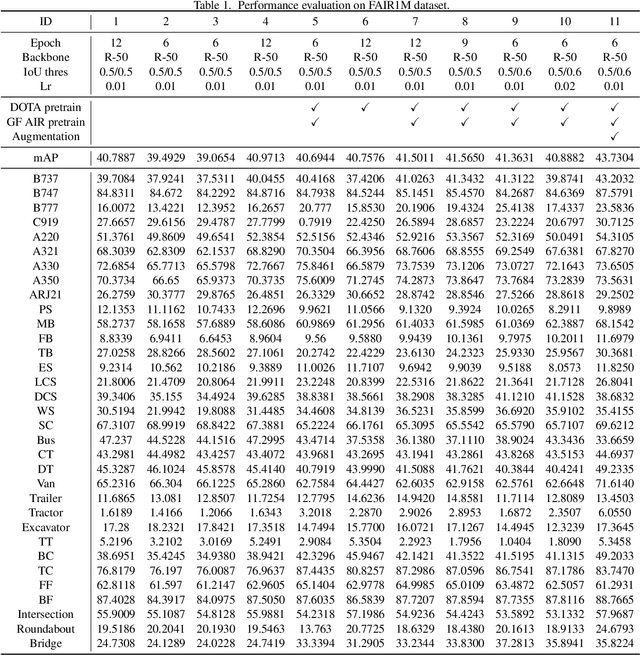

Oriented object detection in remote sensing images has made great progress in recent years. However, most of the current methods only focus on detecting targets, and cannot distinguish fine-grained objects well in complex scenes. In this technical report, we analyzed the key issues of fine-grained object recognition, and use an oriented feature alignment network (OFA-Net) to achieve high-performance fine-grained oriented object recognition in optical remote sensing images. OFA-Net achieves accurate object localization through a rotated bounding boxes refinement module. On this basis, the boundary-constrained rotation feature alignment module is applied to achieve local feature extraction, which is beneficial to fine-grained object classification. The single model of our method achieved mAP of 46.51\% in the GaoFen competition and won 3rd place in the ISPRS benchmark with the mAP of 43.73\%.
AdaL: Adaptive Gradient Transformation Contributes to Convergences and Generalizations
Jul 04, 2021
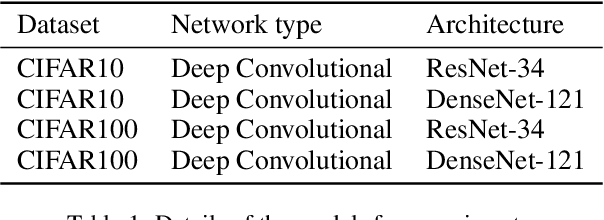
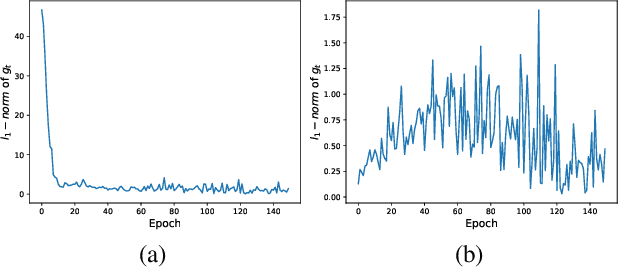
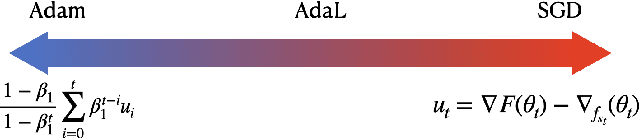
Adaptive optimization methods have been widely used in deep learning. They scale the learning rates adaptively according to the past gradient, which has been shown to be effective to accelerate the convergence. However, they suffer from poor generalization performance compared with SGD. Recent studies point that smoothing exponential gradient noise leads to generalization degeneration phenomenon. Inspired by this, we propose AdaL, with a transformation on the original gradient. AdaL accelerates the convergence by amplifying the gradient in the early stage, as well as dampens the oscillation and stabilizes the optimization by shrinking the gradient later. Such modification alleviates the smoothness of gradient noise, which produces better generalization performance. We have theoretically proved the convergence of AdaL and demonstrated its effectiveness on several benchmarks.
Learning High-Precision Bounding Box for Rotated Object Detection via Kullback-Leibler Divergence
Jun 04, 2021



Existing rotated object detectors are mostly inherited from the horizontal detection paradigm, as the latter has evolved into a well-developed area. However, these detectors are difficult to perform prominently in high-precision detection due to the limitation of current regression loss design, especially for objects with large aspect ratios. Taking the perspective that horizontal detection is a special case for rotated object detection, in this paper, we are motivated to change the design of rotation regression loss from induction paradigm to deduction methodology, in terms of the relation between rotation and horizontal detection. We show that one essential challenge is how to modulate the coupled parameters in the rotation regression loss, as such the estimated parameters can influence to each other during the dynamic joint optimization, in an adaptive and synergetic way. Specifically, we first convert the rotated bounding box into a 2-D Gaussian distribution, and then calculate the Kullback-Leibler Divergence (KLD) between the Gaussian distributions as the regression loss. By analyzing the gradient of each parameter, we show that KLD (and its derivatives) can dynamically adjust the parameter gradients according to the characteristics of the object. It will adjust the importance (gradient weight) of the angle parameter according to the aspect ratio. This mechanism can be vital for high-precision detection as a slight angle error would cause a serious accuracy drop for large aspect ratios objects. More importantly, we have proved that KLD is scale invariant. We further show that the KLD loss can be degenerated into the popular $l_{n}$-norm loss for horizontal detection. Experimental results on seven datasets using different detectors show its consistent superiority, and codes are available at https://github.com/yangxue0827/RotationDetection.
Optimization for Oriented Object Detection via Representation Invariance Loss
Mar 22, 2021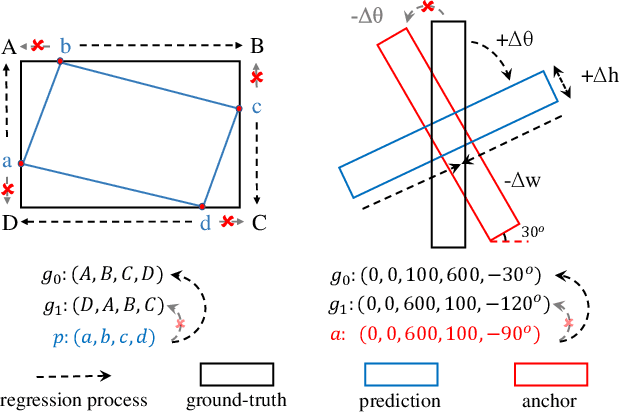
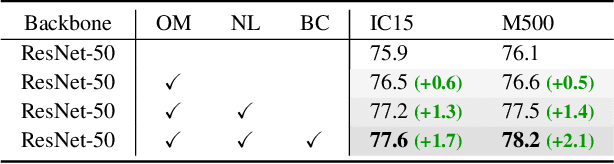
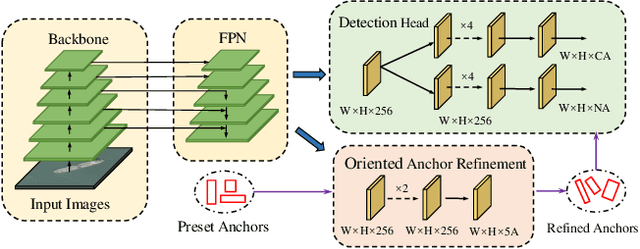
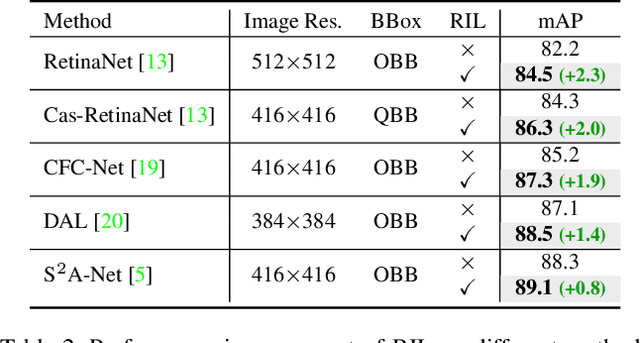
Arbitrary-oriented objects exist widely in natural scenes, and thus the oriented object detection has received extensive attention in recent years. The mainstream rotation detectors use oriented bounding boxes (OBB) or quadrilateral bounding boxes (QBB) to represent the rotating objects. However, these methods suffer from the representation ambiguity for oriented object definition, which leads to suboptimal regression optimization and the inconsistency between the loss metric and the localization accuracy of the predictions. In this paper, we propose a Representation Invariance Loss (RIL) to optimize the bounding box regression for the rotating objects. Specifically, RIL treats multiple representations of an oriented object as multiple equivalent local minima, and hence transforms bounding box regression into an adaptive matching process with these local minima. Then, the Hungarian matching algorithm is adopted to obtain the optimal regression strategy. We also propose a normalized rotation loss to alleviate the weak correlation between different variables and their unbalanced loss contribution in OBB representation. Extensive experiments on remote sensing datasets and scene text datasets show that our method achieves consistent and substantial improvement. The source code and trained models are available at https://github.com/ming71/RIDet.
Rethinking Rotated Object Detection with Gaussian Wasserstein Distance Loss
Jan 28, 2021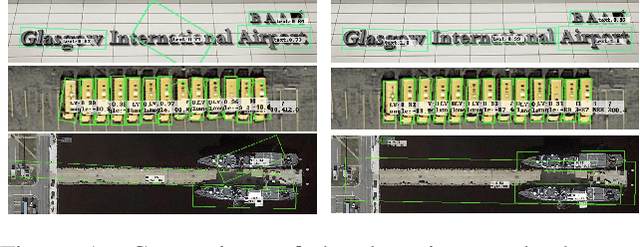

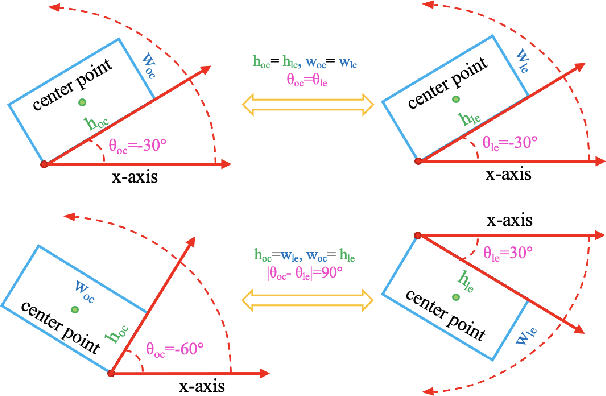
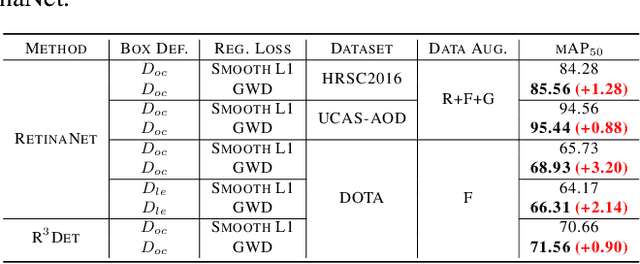
Boundary discontinuity and its inconsistency to the final detection metric have been the bottleneck for rotating detection regression loss design. In this paper, we propose a novel regression loss based on Gaussian Wasserstein distance as a fundamental approach to solve the problem. Specifically, the rotated bounding box is converted to a 2-D Gaussian distribution, which enables to approximate the indifferentiable rotational IoU induced loss by the Gaussian Wasserstein distance (GWD) which can be learned efficiently by gradient back-propagation. GWD can still be informative for learning even there is no overlapping between two rotating bounding boxes which is often the case for small object detection. Thanks to its three unique properties, GWD can also elegantly solve the boundary discontinuity and square-like problem regardless how the bounding box is defined. Experiments on five datasets using different detectors show the effectiveness of our approach. Codes are available at https://github.com/yangxue0827/RotationDetection.
CFC-Net: A Critical Feature Capturing Network for Arbitrary-Oriented Object Detection in Remote Sensing Images
Jan 18, 2021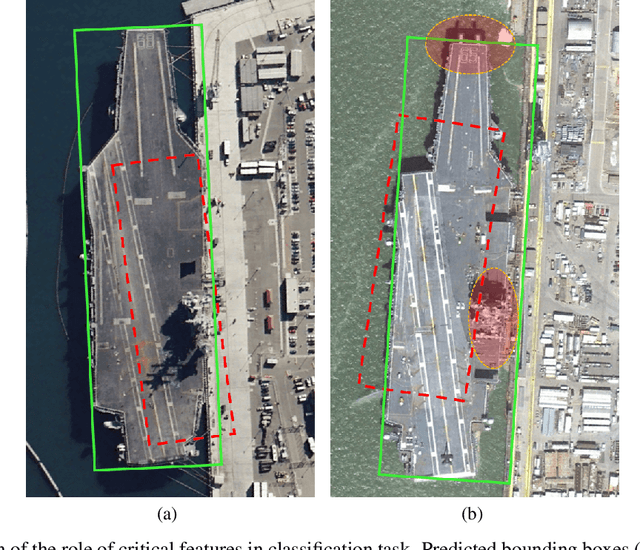
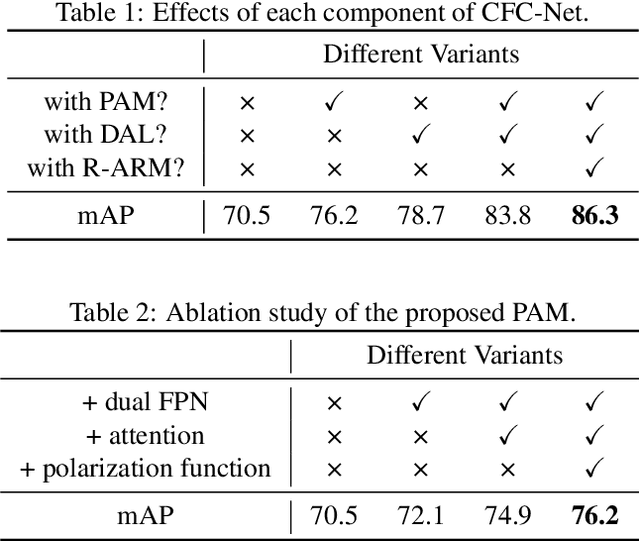
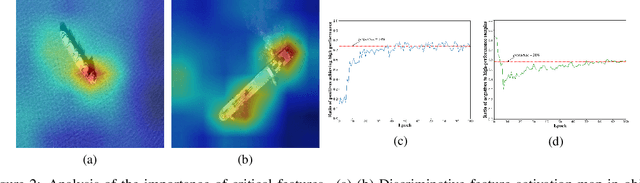
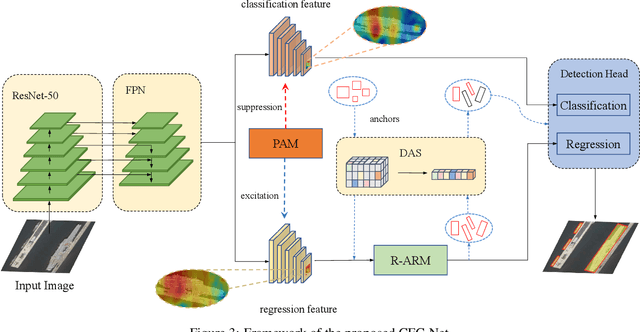
Object detection in optical remote sensing images is an important and challenging task. In recent years, the methods based on convolutional neural networks have made good progress. However, due to the large variation in object scale, aspect ratio, and arbitrary orientation, the detection performance is difficult to be further improved. In this paper, we discuss the role of discriminative features in object detection, and then propose a Critical Feature Capturing Network (CFC-Net) to improve detection accuracy from three aspects: building powerful feature representation, refining preset anchors, and optimizing label assignment. Specifically, we first decouple the classification and regression features, and then construct robust critical features adapted to the respective tasks through the Polarization Attention Module (PAM). With the extracted discriminative regression features, the Rotation Anchor Refinement Module (R-ARM) performs localization refinement on preset horizontal anchors to obtain superior rotation anchors. Next, the Dynamic Anchor Learning (DAL) strategy is given to adaptively select high-quality anchors based on their ability to capture critical features. The proposed framework creates more powerful semantic representations for objects in remote sensing images and achieves high-performance real-time object detection. Experimental results on three remote sensing datasets including HRSC2016, DOTA, and UCAS-AOD show that our method achieves superior detection performance compared with many state-of-the-art approaches. Code and models are available at https://github.com/ming71/CFC-Net.
Dynamic Anchor Learning for Arbitrary-Oriented Object Detection
Dec 15, 2020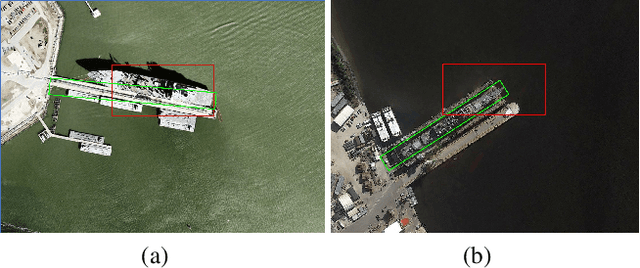
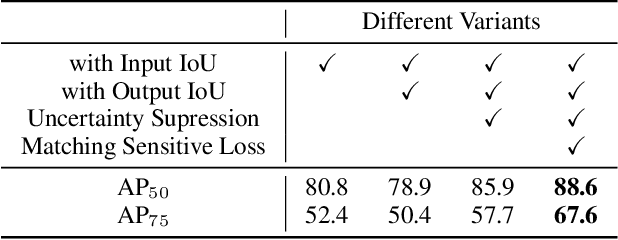
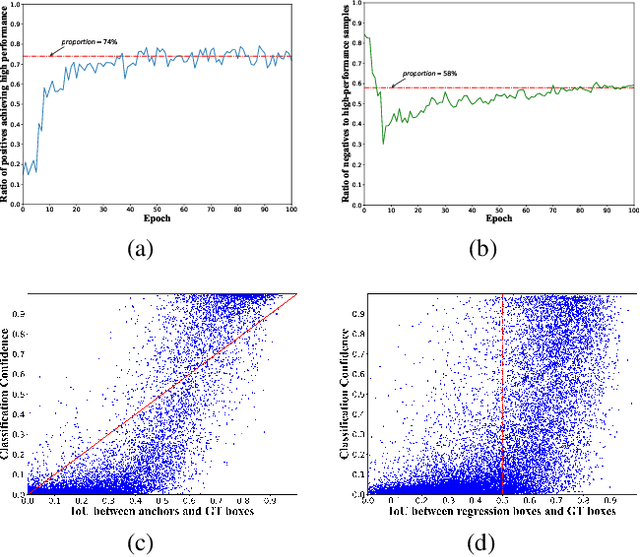
Arbitrary-oriented objects widely appear in natural scenes, aerial photographs, remote sensing images, etc., thus arbitrary-oriented object detection has received considerable attention. Many current rotation detectors use plenty of anchors with different orientations to achieve spatial alignment with ground truth boxes, then Intersection-over-Union (IoU) is applied to sample the positive and negative candidates for training. However, we observe that the selected positive anchors cannot always ensure accurate detections after regression, while some negative samples can achieve accurate localization. It indicates that the quality assessment of anchors through IoU is not appropriate, and this further lead to inconsistency between classification confidence and localization accuracy. In this paper, we propose a dynamic anchor learning (DAL) method, which utilizes the newly defined matching degree to comprehensively evaluate the localization potential of the anchors and carry out a more efficient label assignment process. In this way, the detector can dynamically select high-quality anchors to achieve accurate object detection, and the divergence between classification and regression will be alleviated. With the newly introduced DAL, we achieve superior detection performance for arbitrary-oriented objects with only a few horizontal preset anchors. Experimental results on three remote sensing datasets HRSC2016, DOTA, UCAS-AOD as well as a scene text dataset ICDAR 2015 show that our method achieves substantial improvement compared with the baseline model. Besides, our approach is also universal for object detection using horizontal bound box. The code and models are available at https://github.com/ming71/DAL.