 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeltaBox: Scaling Stateful AI Agents with Millisecond-Level Sandbox Checkpoint/Rollback
May 21, 2026LLM-powered AI agents require high-frequency state exploration (e.g., test-time tree search and reinforcement learning), relying on rapid checkpoint and rollback (C/R) of the complete sandbox state, including files and process state (e.g., memory, contexts, etc.). Existing mechanisms duplicate the entire state, causing hundreds of milliseconds to seconds of latency per C/R, which severely bottlenecks deep search and large-scale fan-outs. This paper observes that subsequent checkpoints in AI agents are highly similar. Therefore, instead of full duplication, a sandbox should only duplicate the changes between consecutive checkpoints (Key Insight). However, it is non-trivial to realize the idea, mainly due to the missing OS supports. This paper proposes a new OS-level abstraction, DeltaState, to enable the change-based transactional C/R for AI agents with two co-designed OS mechanisms. First, DeltaFS enables change-based filesystem C/R by organizing the file states into layers and dynamically freezing the writable layer and inserting a new one during checkpoint, reducing file updates to copy-on-write, and making rollback a simple layer switch. Second, DeltaCR enables change-based process state C/R using incremental dumps, and accelerates rollback by bypassing traditional pipelines to directly fork() from a frozen template process. We then present DeltaBox, a novel agent sandbox achieving millisecond level C/R through the two new mechanisms. Evaluations on SWE-bench and RL micro-benchmarks show DeltaBox completes checkpoint and rollback in millisecond-level latency (14ms and 5ms, respectively), empowering agents to explore substantially more nodes under fixed time budgets.
Get Experience from Practice: LLM Agents with Record & Replay
May 23, 2025AI agents, empowered by Large Language Models (LLMs) and communication protocols such as MCP and A2A, have rapidly evolved from simple chatbots to autonomous entities capable of executing complex, multi-step tasks, demonstrating great potential. However, the LLMs' inherent uncertainty and heavy computational resource requirements pose four significant challenges to the development of safe and efficient agents: reliability, privacy, cost and performance. Existing approaches, like model alignment, workflow constraints and on-device model deployment, can partially alleviate some issues but often with limitations, failing to fundamentally resolve these challenges. This paper proposes a new paradigm called AgentRR (Agent Record & Replay), which introduces the classical record-and-replay mechanism into AI agent frameworks. The core idea is to: 1. Record an agent's interaction trace with its environment and internal decision process during task execution, 2. Summarize this trace into a structured "experience" encapsulating the workflow and constraints, and 3. Replay these experiences in subsequent similar tasks to guide the agent's behavior. We detail a multi-level experience abstraction method and a check function mechanism in AgentRR: the former balances experience specificity and generality, while the latter serves as a trust anchor to ensure completeness and safety during replay. In addition, we explore multiple application modes of AgentRR, including user-recorded task demonstration, large-small model collaboration and privacy-aware agent execution, and envision an experience repository for sharing and reusing knowledge to further reduce deployment cost.
Optimization for Oriented Object Detection via Representation Invariance Loss
Mar 22, 2021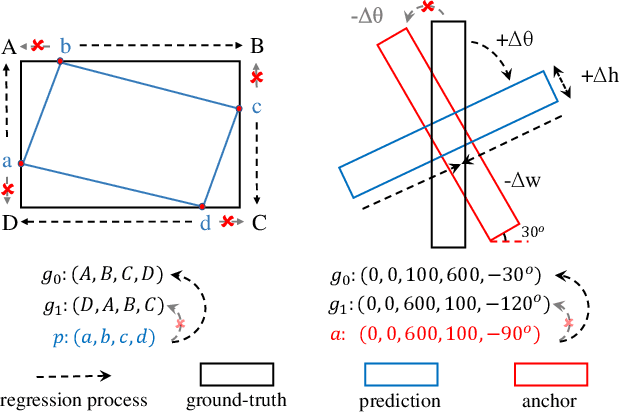
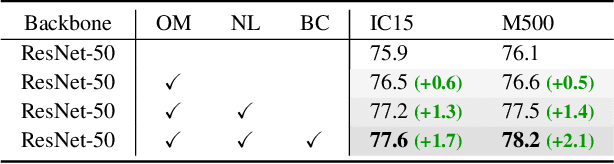
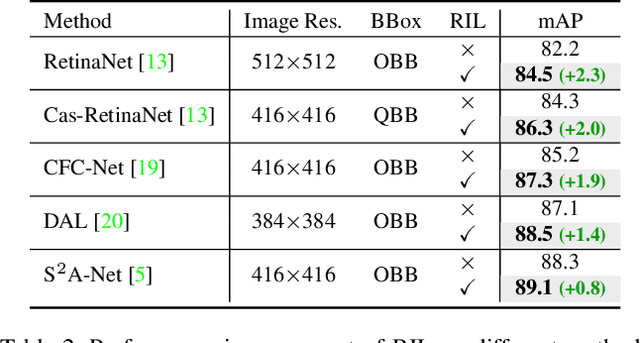
Arbitrary-oriented objects exist widely in natural scenes, and thus the oriented object detection has received extensive attention in recent years. The mainstream rotation detectors use oriented bounding boxes (OBB) or quadrilateral bounding boxes (QBB) to represent the rotating objects. However, these methods suffer from the representation ambiguity for oriented object definition, which leads to suboptimal regression optimization and the inconsistency between the loss metric and the localization accuracy of the predictions. In this paper, we propose a Representation Invariance Loss (RIL) to optimize the bounding box regression for the rotating objects. Specifically, RIL treats multiple representations of an oriented object as multiple equivalent local minima, and hence transforms bounding box regression into an adaptive matching process with these local minima. Then, the Hungarian matching algorithm is adopted to obtain the optimal regression strategy. We also propose a normalized rotation loss to alleviate the weak correlation between different variables and their unbalanced loss contribution in OBB representation. Extensive experiments on remote sensing datasets and scene text datasets show that our method achieves consistent and substantial improvement. The source code and trained models are available at https://github.com/ming71/RIDet.
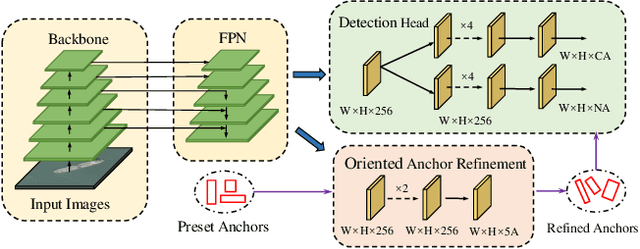
CFC-Net: A Critical Feature Capturing Network for Arbitrary-Oriented Object Detection in Remote Sensing Images
Jan 18, 2021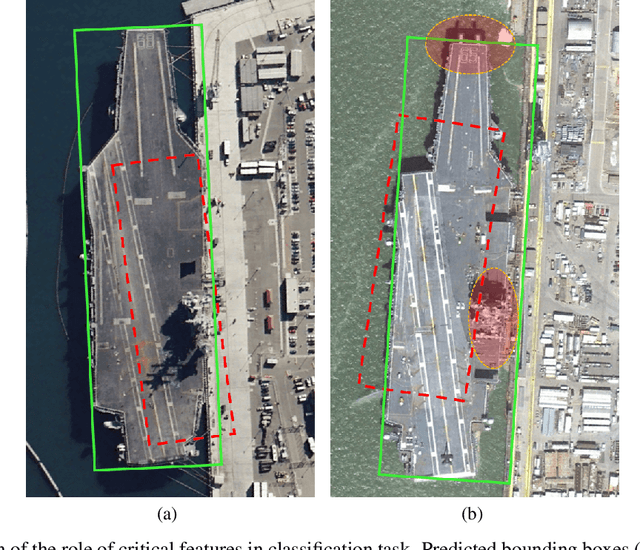
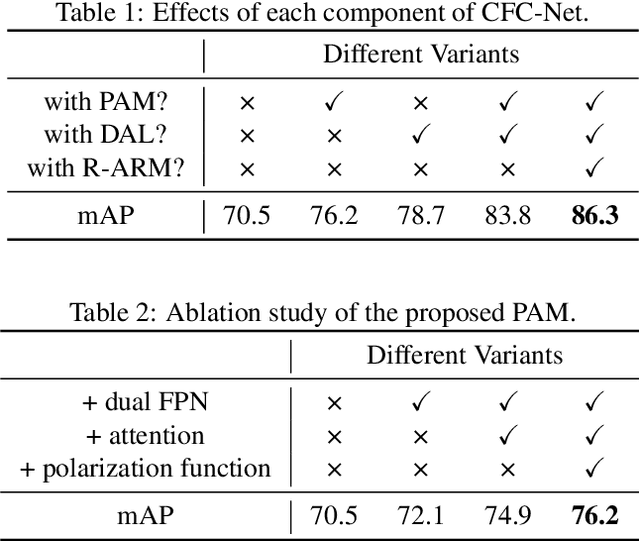
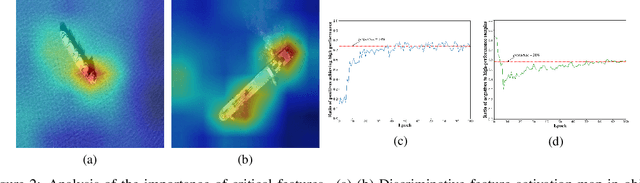
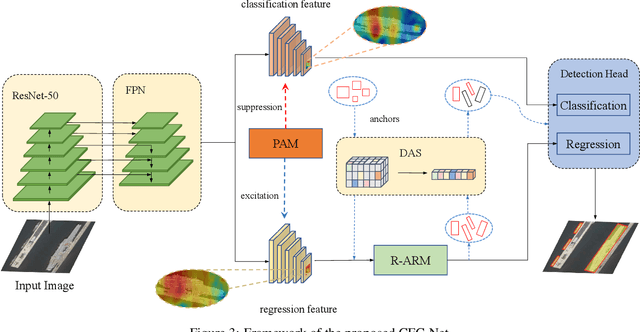
Object detection in optical remote sensing images is an important and challenging task. In recent years, the methods based on convolutional neural networks have made good progress. However, due to the large variation in object scale, aspect ratio, and arbitrary orientation, the detection performance is difficult to be further improved. In this paper, we discuss the role of discriminative features in object detection, and then propose a Critical Feature Capturing Network (CFC-Net) to improve detection accuracy from three aspects: building powerful feature representation, refining preset anchors, and optimizing label assignment. Specifically, we first decouple the classification and regression features, and then construct robust critical features adapted to the respective tasks through the Polarization Attention Module (PAM). With the extracted discriminative regression features, the Rotation Anchor Refinement Module (R-ARM) performs localization refinement on preset horizontal anchors to obtain superior rotation anchors. Next, the Dynamic Anchor Learning (DAL) strategy is given to adaptively select high-quality anchors based on their ability to capture critical features. The proposed framework creates more powerful semantic representations for objects in remote sensing images and achieves high-performance real-time object detection. Experimental results on three remote sensing datasets including HRSC2016, DOTA, and UCAS-AOD show that our method achieves superior detection performance compared with many state-of-the-art approaches. Code and models are available at https://github.com/ming71/CFC-Net.