 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMambaRaw: Selective State Space Modeling for Efficient 4K Raw Image Reconstruction
Jun 23, 2026In-camera JPEG previews are ubiquitous in raw image formats and provide an sRGB reference at negligible storage cost. Although existing metadata-based reconstruction frameworks can exploit this side information when recovering raw images, their context models often become computationally expensive especially at high resolution, eg, 4K raw image, given that attention mechanisms scale quadratically with feature maps, hindering its practical application. To address these limitations, we propose MambaRaw, a JPEG-conditioned metadata-based raw image reconstruction framework that uses State Space Models (SSMs) to estimate entropy parameters efficiently. Our key contribution comprises a Spatial-Energy Coupled Context Modeling mechanism with two lightweight modules: (1) TileMambaBlock, which performs Mamba-style selective scanning only on information-dense tiles to improve the efficiency; and (2) Energy-Aware Refinement (EAR), an identity-initialized residual module that enhance feature representation to match the long-tail energy distribution of raw signals. Extensive experiments on three camera datasets (Sony, Olympus, Samsung) show consistent improvements over strong metadata-based baselines and set a new state of the art for JPEG-guided raw reconstruction with great efficiency. Notably, at low metadata bitrates, MambaRaw increases PSNR by 1.2--1.4 dB and reduces end-to-end coding latency by about 9%. Code is released at https://github.com/Peizeli1/MambaRaw.
Towards Generalist Game Players: An Investigation of Foundation Models in the Game Multiverse
May 11, 2026The real world unfolds along a single set of physics laws, yet human intelligence demonstrates a remarkable capacity to generalize experiences from this singular physical existence into a multiverse of games, each governed by entirely different rules, aesthetics, physics, and objectives. This omni-reality adaptability is a hallmark of general intelligence. As Artificial Intelligence progresses towards Artificial General Intelligence, the multiverse of games has evolved from mere entertainment into the ultimate ground for training and evaluating AGI. The pursuit of this generality has unfolded across four eras: from environment-specific symbolic and reinforcement learning agents, to current large foundation models acting as generalist players, and toward a future creator stage where agent both creates new game worlds and continually evolves within them. We trace the full lifecycle of a generalist game player along four interdependent pillars: Dataset, Model, Harness, and Benchmark. Every advance across these pillars can be read as an attempt to break one of five fundamental trade-offs that currently bound the whole system. Building on this end-to-end view, we chart a five-level roadmap, progressing from single-game mastery to the ultimate creator stage in which the agent simultaneously creates and evolves within theoretical game multiverse. Taken together, our work offers a unified lens onto a rapidly shifting field,and a principled path toward the omnipotent generalist agent capable of seamlessly mastering any challenge within the multiverse of games, thereby paving the way for AGI.
A Closer Look into LLMs for Table Understanding
Mar 16, 2026Despite the success of Large Language Models (LLMs) in table understanding, their internal mechanisms remain unclear. In this paper, we conduct an empirical study on 16 LLMs, covering general LLMs, specialist tabular LLMs, and Mixture-of-Experts (MoE) models, to explore how LLMs understand tabular data and perform downstream tasks. Our analysis focus on 4 dimensions including the attention dynamics, the effective layer depth, the expert activation, and the impacts of input designs. Key findings include: (1) LLMs follow a three-phase attention pattern -- early layers scan the table broadly, middle layers localize relevant cells, and late layers amplify their contributions; (2) tabular tasks require deeper layers than math reasoning to reach stable predictions; (3) MoE models activate table-specific experts in middle layers, with early and late layers sharing general-purpose experts; (4) Chain-of-Thought prompting increases table attention, further enhanced by table-tuning. We hope these findings and insights can facilitate interpretability and future research on table-related tasks.
PartRAG: Retrieval-Augmented Part-Level 3D Generation and Editing
Feb 19, 2026Single-image 3D generation with part-level structure remains challenging: learned priors struggle to cover the long tail of part geometries and maintain multi-view consistency, and existing systems provide limited support for precise, localized edits. We present PartRAG, a retrieval-augmented framework that integrates an external part database with a diffusion transformer to couple generation with an editable representation. To overcome the first challenge, we introduce a Hierarchical Contrastive Retrieval module that aligns dense image patches with 3D part latents at both part and object granularity, retrieving from a curated bank of 1,236 part-annotated assets to inject diverse, physically plausible exemplars into denoising. To overcome the second challenge, we add a masked, part-level editor that operates in a shared canonical space, enabling swaps, attribute refinements, and compositional updates without regenerating the whole object while preserving non-target parts and multi-view consistency. PartRAG achieves competitive results on Objaverse, ShapeNet, and ABO-reducing Chamfer Distance from 0.1726 to 0.1528 and raising F-Score from 0.7472 to 0.844 on Objaverse-with inference of 38s and interactive edits in 5-8s. Qualitatively, PartRAG produces sharper part boundaries, better thin-structure fidelity, and robust behavior on articulated objects. Code: https://github.com/AIGeeksGroup/PartRAG. Website: https://aigeeksgroup.github.io/PartRAG.
Evolving Beyond Snapshots: Harmonizing Structure and Sequence via Entity State Tuning for Temporal Knowledge Graph Forecasting
Feb 12, 2026Temporal knowledge graph (TKG) forecasting requires predicting future facts by jointly modeling structural dependencies within each snapshot and temporal evolution across snapshots. However, most existing methods are stateless: they recompute entity representations at each timestamp from a limited query window, leading to episodic amnesia and rapid decay of long-term dependencies. To address this limitation, we propose Entity State Tuning (EST), an encoder-agnostic framework that endows TKG forecasters with persistent and continuously evolving entity states. EST maintains a global state buffer and progressively aligns structural evidence with sequential signals via a closed-loop design. Specifically, a topology-aware state perceiver first injects entity-state priors into structural encoding. Then, a unified temporal context module aggregates the state-enhanced events with a pluggable sequence backbone. Subsequently, a dual-track evolution mechanism writes the updated context back to the global entity state memory, balancing plasticity against stability. Experiments on multiple benchmarks show that EST consistently improves diverse backbones and achieves state-of-the-art performance, highlighting the importance of state persistence for long-horizon TKG forecasting. The code is published at https://github.com/yuanwuyuan9/Evolving-Beyond-Snapshots
Multimodal Hypothetical Summary for Retrieval-based Multi-image Question Answering
Dec 19, 2024Retrieval-based multi-image question answering (QA) task involves retrieving multiple question-related images and synthesizing these images to generate an answer. Conventional "retrieve-then-answer" pipelines often suffer from cascading errors because the training objective of QA fails to optimize the retrieval stage. To address this issue, we propose a novel method to effectively introduce and reference retrieved information into the QA. Given the image set to be retrieved, we employ a multimodal large language model (visual perspective) and a large language model (textual perspective) to obtain multimodal hypothetical summary in question-form and description-form. By combining visual and textual perspectives, MHyS captures image content more specifically and replaces real images in retrieval, which eliminates the modality gap by transforming into text-to-text retrieval and helps improve retrieval. To more advantageously introduce retrieval with QA, we employ contrastive learning to align queries (questions) with MHyS. Moreover, we propose a coarse-to-fine strategy for calculating both sentence-level and word-level similarity scores, to further enhance retrieval and filter out irrelevant details. Our approach achieves a 3.7% absolute improvement over state-of-the-art methods on RETVQA and a 14.5% improvement over CLIP. Comprehensive experiments and detailed ablation studies demonstrate the superiority of our method.
Multimodal Indoor Localization Using Crowdsourced Radio Maps
Nov 17, 2023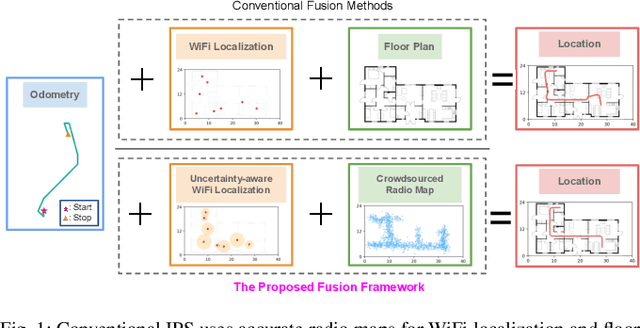
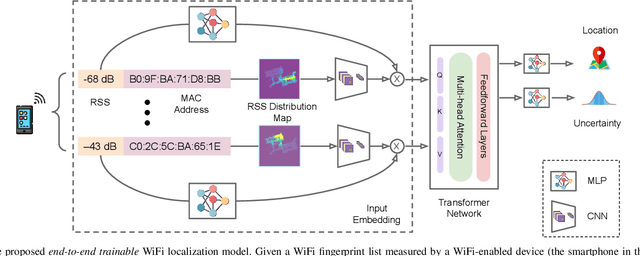
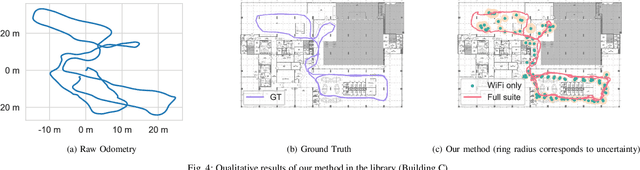
Indoor Positioning Systems (IPS) traditionally rely on odometry and building infrastructures like WiFi, often supplemented by building floor plans for increased accuracy. However, the limitation of floor plans in terms of availability and timeliness of updates challenges their wide applicability. In contrast, the proliferation of smartphones and WiFi-enabled robots has made crowdsourced radio maps - databases pairing locations with their corresponding Received Signal Strengths (RSS) - increasingly accessible. These radio maps not only provide WiFi fingerprint-location pairs but encode movement regularities akin to the constraints imposed by floor plans. This work investigates the possibility of leveraging these radio maps as a substitute for floor plans in multimodal IPS. We introduce a new framework to address the challenges of radio map inaccuracies and sparse coverage. Our proposed system integrates an uncertainty-aware neural network model for WiFi localization and a bespoken Bayesian fusion technique for optimal fusion. Extensive evaluations on multiple real-world sites indicate a significant performance enhancement, with results showing ~ 25% improvement over the best baseline
Robust Human Detection under Visual Degradation via Thermal and mmWave Radar Fusion
Jul 07, 2023The majority of human detection methods rely on the sensor using visible lights (e.g., RGB cameras) but such sensors are limited in scenarios with degraded vision conditions. In this paper, we present a multimodal human detection system that combines portable thermal cameras and single-chip mmWave radars. To mitigate the noisy detection features caused by the low contrast of thermal cameras and the multi-path noise of radar point clouds, we propose a Bayesian feature extractor and a novel uncertainty-guided fusion method that surpasses a variety of competing methods, either single-modal or multi-modal. We evaluate the proposed method on real-world data collection and demonstrate that our approach outperforms the state-of-the-art methods by a large margin.
Democratizing Pathological Image Segmentation with Lay Annotators via Molecular-empowered Learning
May 31, 2023Multi-class cell segmentation in high-resolution Giga-pixel whole slide images (WSI) is critical for various clinical applications. Training such an AI model typically requires labor-intensive pixel-wise manual annotation from experienced domain experts (e.g., pathologists). Moreover, such annotation is error-prone when differentiating fine-grained cell types (e.g., podocyte and mesangial cells) via the naked human eye. In this study, we assess the feasibility of democratizing pathological AI deployment by only using lay annotators (annotators without medical domain knowledge). The contribution of this paper is threefold: (1) We proposed a molecular-empowered learning scheme for multi-class cell segmentation using partial labels from lay annotators; (2) The proposed method integrated Giga-pixel level molecular-morphology cross-modality registration, molecular-informed annotation, and molecular-oriented segmentation model, so as to achieve significantly superior performance via 3 lay annotators as compared with 2 experienced pathologists; (3) A deep corrective learning (learning with imperfect label) method is proposed to further improve the segmentation performance using partially annotated noisy data. From the experimental results, our learning method achieved F1 = 0.8496 using molecular-informed annotations from lay annotators, which is better than conventional morphology-based annotations (F1 = 0.7051) from experienced pathologists. Our method democratizes the development of a pathological segmentation deep model to the lay annotator level, which consequently scales up the learning process similar to a non-medical computer vision task. The official implementation and cell annotations are publicly available at https://github.com/hrlblab/MolecularEL.
An End-to-end Pipeline for 3D Slide-wise Multi-stain Renal Pathology Registration
May 19, 2023Tissue examination and quantification in a 3D context on serial section whole slide images (WSIs) were laborintensive and time-consuming tasks. Our previous study proposed a novel registration-based method (Map3D) to automatically align WSIs to the same physical space, reducing the human efforts of screening serial sections from WSIs. However, the registration performance of our Map3D method was only evaluated on single-stain WSIs with large-scale kidney tissue samples. In this paper, we provide a Docker for an end-to-end 3D slide-wise registration pipeline on needle biopsy serial sections in a multi-stain paradigm. The contribution of this study is three-fold: (1) We release a containerized Docker for an end-to-end multi-stain WSI registration. (2) We prove that the Map3D pipeline is capable of sectional registration from multi-stain WSI. (3) We verify that the Map3D pipeline can also be applied to needle biopsy tissue samples. The source code and the Docker have been made publicly available at https://github.com/hrlblab/Map3D.
* 6 pages, 4 figures