 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOdomBeyondVision: An Indoor Multi-modal Multi-platform Odometry Dataset Beyond the Visible Spectrum
Paper and Code

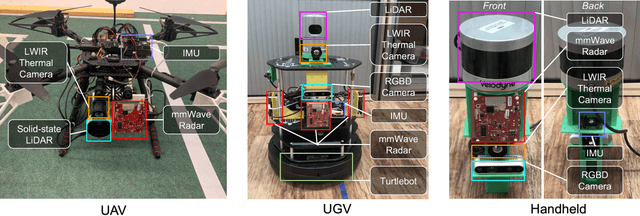
This paper presents a multimodal indoor odometry dataset, OdomBeyondVision, featuring multiple sensors across the different spectrum and collected with different mobile platforms. Not only does OdomBeyondVision contain the traditional navigation sensors, sensors such as IMUs, mechanical LiDAR, RGBD camera, it also includes several emerging sensors such as the single-chip mmWave radar, LWIR thermal camera and solid-state LiDAR. With the above sensors on UAV, UGV and handheld platforms, we respectively recorded the multimodal odometry data and their movement trajectories in various indoor scenes and different illumination conditions. We release the exemplar radar, radar-inertial and thermal-inertial odometry implementations to demonstrate their results for future works to compare against and improve upon. The full dataset including toolkit and documentation is publicly available at: https://github.com/MAPS-Lab/OdomBeyondVision.