 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolve-Detect-Verify: Inference-Time Scaling with Flexible Generative Verifier
May 17, 2025
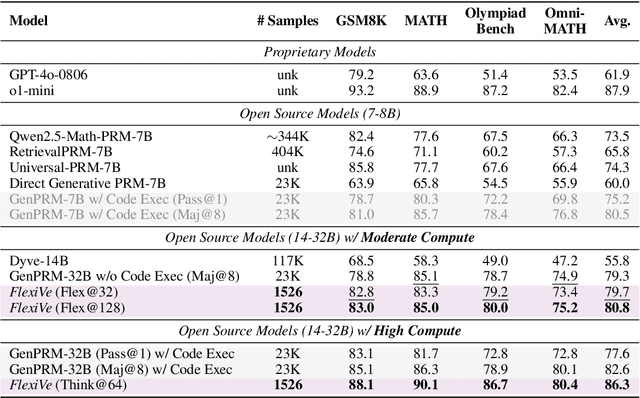
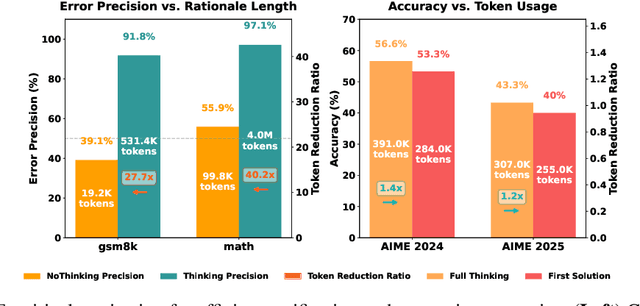
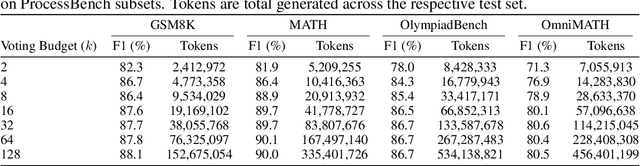
Large Language Model (LLM) reasoning for complex tasks inherently involves a trade-off between solution accuracy and computational efficiency. The subsequent step of verification, while intended to improve performance, further complicates this landscape by introducing its own challenging trade-off: sophisticated Generative Reward Models (GenRMs) can be computationally prohibitive if naively integrated with LLMs at test-time, while simpler, faster methods may lack reliability. To overcome these challenges, we introduce FlexiVe, a novel generative verifier that flexibly balances computational resources between rapid, reliable fast thinking and meticulous slow thinking using a Flexible Allocation of Verification Budget strategy. We further propose the Solve-Detect-Verify pipeline, an efficient inference-time scaling framework that intelligently integrates FlexiVe, proactively identifying solution completion points to trigger targeted verification and provide focused solver feedback. Experiments show FlexiVe achieves superior accuracy in pinpointing errors within reasoning traces on ProcessBench. Furthermore, on challenging mathematical reasoning benchmarks (AIME 2024, AIME 2025, and CNMO), our full approach outperforms baselines like self-consistency in reasoning accuracy and inference efficiency. Our system offers a scalable and effective solution to enhance LLM reasoning at test time.
RadarOcc: Robust 3D Occupancy Prediction with 4D Imaging Radar
May 22, 20243D occupancy-based perception pipeline has significantly advanced autonomous driving by capturing detailed scene descriptions and demonstrating strong generalizability across various object categories and shapes. Current methods predominantly rely on LiDAR or camera inputs for 3D occupancy prediction. These methods are susceptible to adverse weather conditions, limiting the all-weather deployment of self-driving cars. To improve perception robustness, we leverage the recent advances in automotive radars and introduce a novel approach that utilizes 4D imaging radar sensors for 3D occupancy prediction. Our method, RadarOcc, circumvents the limitations of sparse radar point clouds by directly processing the 4D radar tensor, thus preserving essential scene details. RadarOcc innovatively addresses the challenges associated with the voluminous and noisy 4D radar data by employing Doppler bins descriptors, sidelobe-aware spatial sparsification, and range-wise self-attention mechanisms. To minimize the interpolation errors associated with direct coordinate transformations, we also devise a spherical-based feature encoding followed by spherical-to-Cartesian feature aggregation. We benchmark various baseline methods based on distinct modalities on the public K-Radar dataset. The results demonstrate RadarOcc's state-of-the-art performance in radar-based 3D occupancy prediction and promising results even when compared with LiDAR- or camera-based methods. Additionally, we present qualitative evidence of the superior performance of 4D radar in adverse weather conditions and explore the impact of key pipeline components through ablation studies.
Beyond Trend and Periodicity: Guiding Time Series Forecasting with Textual Cues
May 22, 2024This work introduces a novel Text-Guided Time Series Forecasting (TGTSF) task. By integrating textual cues, such as channel descriptions and dynamic news, TGTSF addresses the critical limitations of traditional methods that rely purely on historical data. To support this task, we propose TGForecaster, a robust baseline model that fuses textual cues and time series data using cross-attention mechanisms. We then present four meticulously curated benchmark datasets to validate the proposed framework, ranging from simple periodic data to complex, event-driven fluctuations. Our comprehensive evaluations demonstrate that TGForecaster consistently achieves state-of-the-art performance, highlighting the transformative potential of incorporating textual information into time series forecasting. This work not only pioneers a novel forecasting task but also establishes a new benchmark for future research, driving advancements in multimodal data integration for time series models.
ThermoHands: A Benchmark for 3D Hand Pose Estimation from Egocentric Thermal Image
Mar 14, 2024In this work, we present ThermoHands, a new benchmark for thermal image-based egocentric 3D hand pose estimation, aimed at overcoming challenges like varying lighting and obstructions (e.g., handwear). The benchmark includes a diverse dataset from 28 subjects performing hand-object and hand-virtual interactions, accurately annotated with 3D hand poses through an automated process. We introduce a bespoken baseline method, TheFormer, utilizing dual transformer modules for effective egocentric 3D hand pose estimation in thermal imagery. Our experimental results highlight TheFormer's leading performance and affirm thermal imaging's effectiveness in enabling robust 3D hand pose estimation in adverse conditions.
Multimodal Indoor Localization Using Crowdsourced Radio Maps
Nov 17, 2023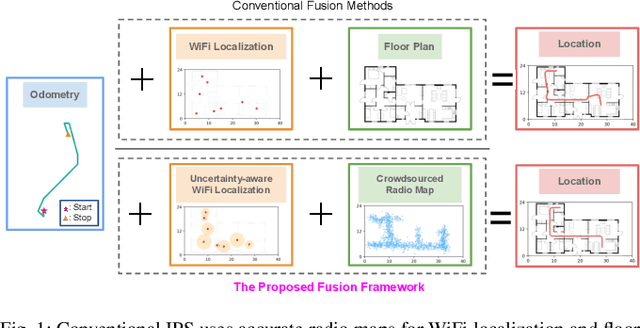
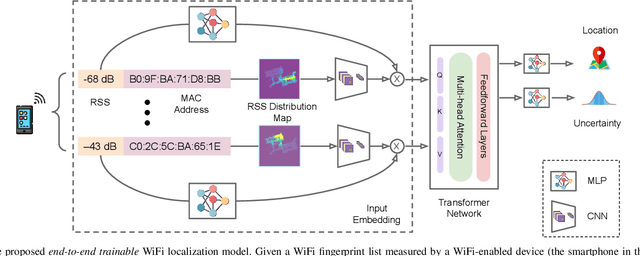
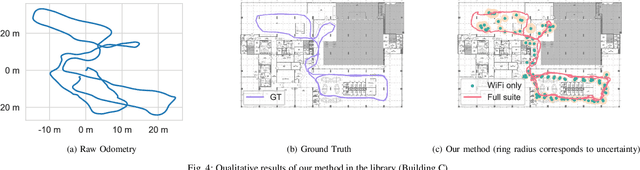
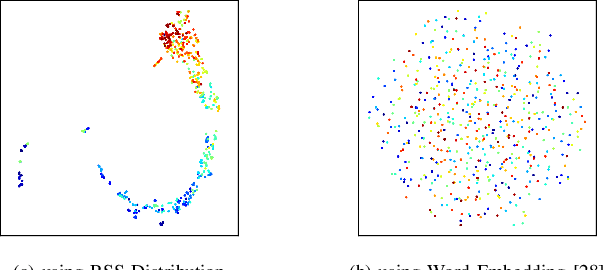
Indoor Positioning Systems (IPS) traditionally rely on odometry and building infrastructures like WiFi, often supplemented by building floor plans for increased accuracy. However, the limitation of floor plans in terms of availability and timeliness of updates challenges their wide applicability. In contrast, the proliferation of smartphones and WiFi-enabled robots has made crowdsourced radio maps - databases pairing locations with their corresponding Received Signal Strengths (RSS) - increasingly accessible. These radio maps not only provide WiFi fingerprint-location pairs but encode movement regularities akin to the constraints imposed by floor plans. This work investigates the possibility of leveraging these radio maps as a substitute for floor plans in multimodal IPS. We introduce a new framework to address the challenges of radio map inaccuracies and sparse coverage. Our proposed system integrates an uncertainty-aware neural network model for WiFi localization and a bespoken Bayesian fusion technique for optimal fusion. Extensive evaluations on multiple real-world sites indicate a significant performance enhancement, with results showing ~ 25% improvement over the best baseline
On Function-Coupled Watermarks for Deep Neural Networks
Feb 08, 2023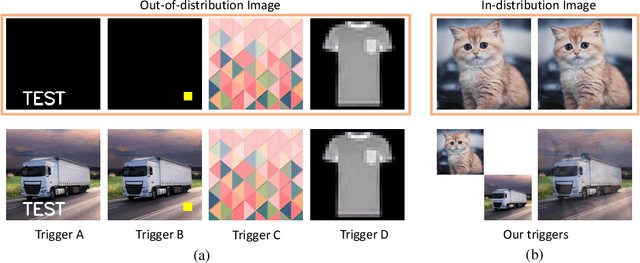
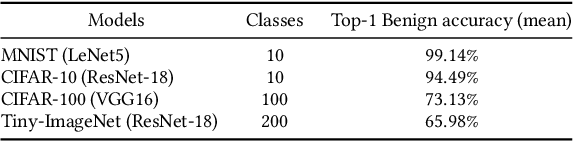
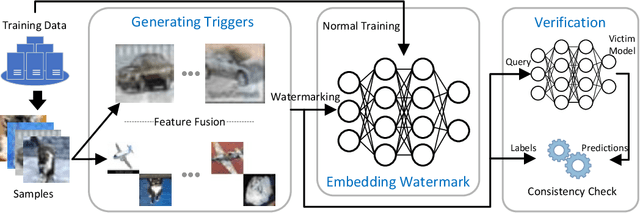
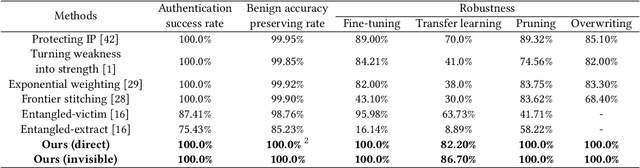
Well-performed deep neural networks (DNNs) generally require massive labelled data and computational resources for training. Various watermarking techniques are proposed to protect such intellectual properties (IPs), wherein the DNN providers implant secret information into the model so that they can later claim IP ownership by retrieving their embedded watermarks with some dedicated trigger inputs. While promising results are reported in the literature, existing solutions suffer from watermark removal attacks, such as model fine-tuning and model pruning. In this paper, we propose a novel DNN watermarking solution that can effectively defend against the above attacks. Our key insight is to enhance the coupling of the watermark and model functionalities such that removing the watermark would inevitably degrade the model's performance on normal inputs. To this end, unlike previous methods relying on secret features learnt from out-of-distribution data, our method only uses features learnt from in-distribution data. Specifically, on the one hand, we propose to sample inputs from the original training dataset and fuse them as watermark triggers. On the other hand, we randomly mask model weights during training so that the information of our embedded watermarks spreads in the network. By doing so, model fine-tuning/pruning would not forget our function-coupled watermarks. Evaluation results on various image classification tasks show a 100\% watermark authentication success rate under aggressive watermark removal attacks, significantly outperforming existing solutions. Code is available: https://github.com/cure-lab/Function-Coupled-Watermark.