 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirectTracker: 3D Multi-Object Tracking Using Direct Image Alignment and Photometric Bundle Adjustment
Sep 29, 2022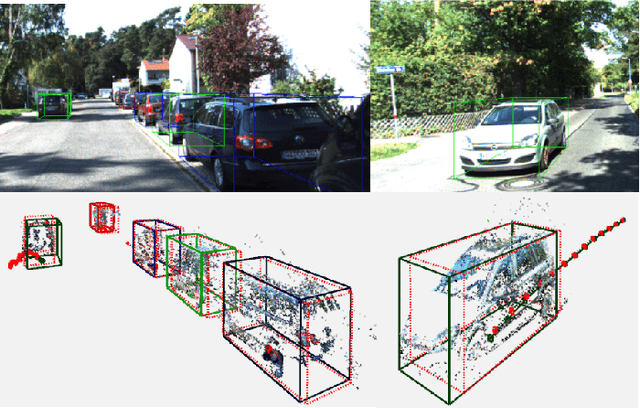
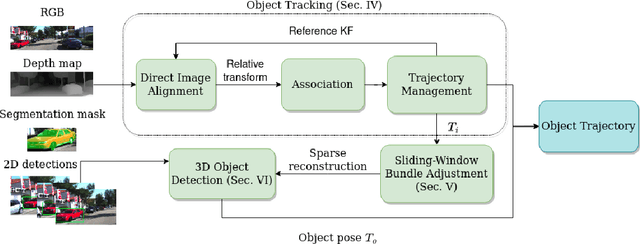


Direct methods have shown excellent performance in the applications of visual odometry and SLAM. In this work we propose to leverage their effectiveness for the task of 3D multi-object tracking. To this end, we propose DirectTracker, a framework that effectively combines direct image alignment for the short-term tracking and sliding-window photometric bundle adjustment for 3D object detection. Object proposals are estimated based on the sparse sliding-window pointcloud and further refined using an optimization-based cost function that carefully combines 3D and 2D cues to ensure consistency in image and world space. We propose to evaluate 3D tracking using the recently introduced higher-order tracking accuracy (HOTA) metric and the generalized intersection over union similarity measure to mitigate the limitations of the conventional use of intersection over union for the evaluation of vision-based trackers. We perform evaluation on the KITTI Tracking benchmark for the Car class and show competitive performance in tracking objects both in 2D and 3D.
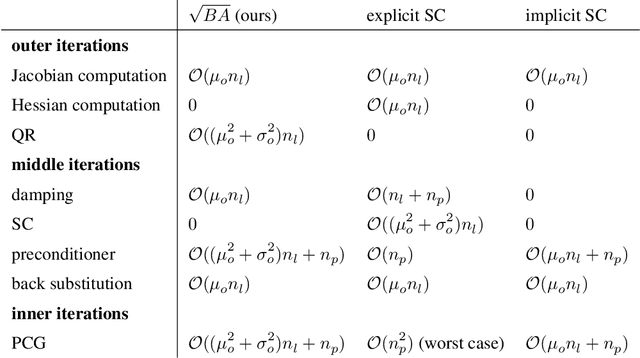
Power Bundle Adjustment for Large-Scale 3D Reconstruction
May 03, 2022



We present the design and the implementation of a new expansion type algorithm to solve large-scale bundle adjustment problems. Our approach -- called Power Bundle Adjustment -- is based on the power series expansion of the inverse Schur complement. This initiates a new family of solvers that we call inverse expansion methods. We show with the real-world BAL dataset that the proposed solver challenges the traditional direct and iterative methods. The solution of the normal equation is significantly accelerated, even for reaching a very high accuracy. Last but not least, our solver can also complement a recently presented distributed bundle adjustment framework. We demonstrate that employing the proposed Power Bundle Adjustment as a sub-problem solver greatly improves speed and accuracy of the distributed optimization.
The Probabilistic Normal Epipolar Constraint for Frame-To-Frame Rotation Optimization under Uncertain Feature Positions
Apr 05, 2022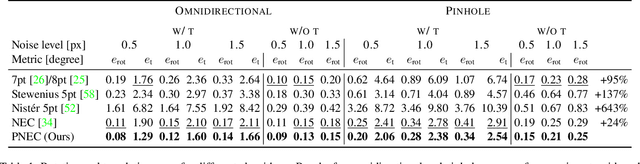

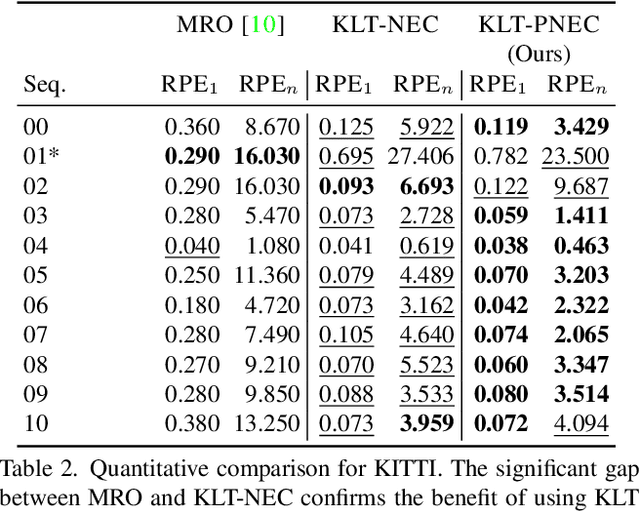
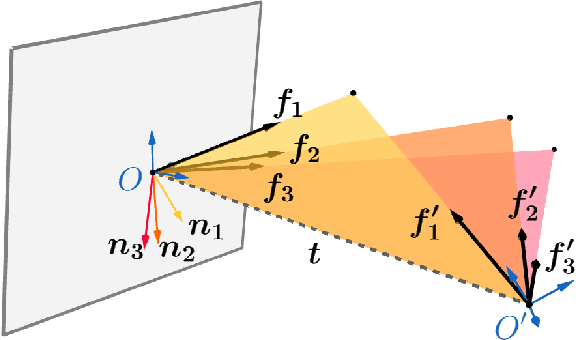
The estimation of the relative pose of two camera views is a fundamental problem in computer vision. Kneip et al. proposed to solve this problem by introducing the normal epipolar constraint (NEC). However, their approach does not take into account uncertainties, so that the accuracy of the estimated relative pose is highly dependent on accurate feature positions in the target frame. In this work, we introduce the probabilistic normal epipolar constraint (PNEC) that overcomes this limitation by accounting for anisotropic and inhomogeneous uncertainties in the feature positions. To this end, we propose a novel objective function, along with an efficient optimization scheme that effectively minimizes our objective while maintaining real-time performance. In experiments on synthetic data, we demonstrate that the novel PNEC yields more accurate rotation estimates than the original NEC and several popular relative rotation estimation algorithms. Furthermore, we integrate the proposed method into a state-of-the-art monocular rotation-only odometry system and achieve consistently improved results for the real-world KITTI dataset.
Multidirectional Conjugate Gradients for Scalable Bundle Adjustment
Oct 08, 2021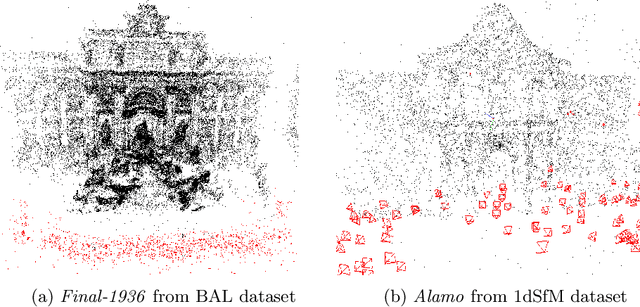
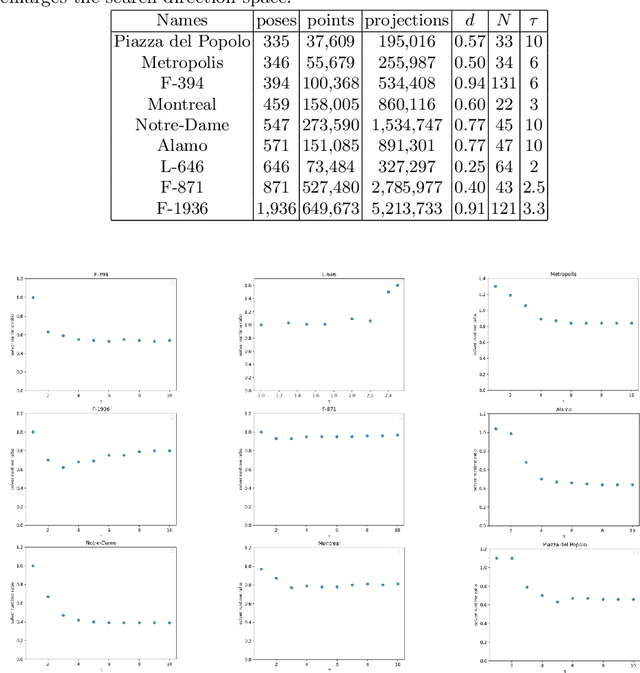
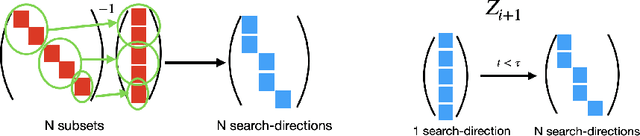
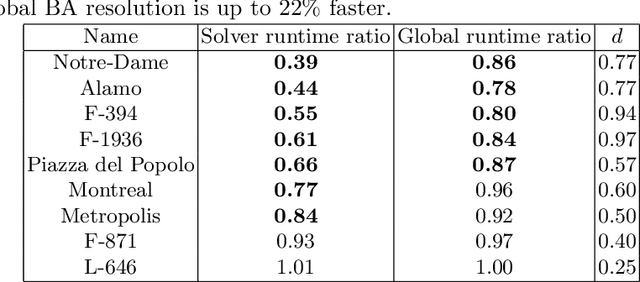
We revisit the problem of large-scale bundle adjustment and propose a technique called Multidirectional Conjugate Gradients that accelerates the solution of the normal equation by up to 61%. The key idea is that we enlarge the search space of classical preconditioned conjugate gradients to include multiple search directions. As a consequence, the resulting algorithm requires fewer iterations, leading to a significant speedup of large-scale reconstruction, in particular for denser problems where traditional approaches notoriously struggle. We provide a number of experimental ablation studies revealing the robustness to variations in the hyper-parameters and the speedup as a function of problem density.
Towards Robust Monocular Visual Odometry for Flying Robots on Planetary Missions
Sep 12, 2021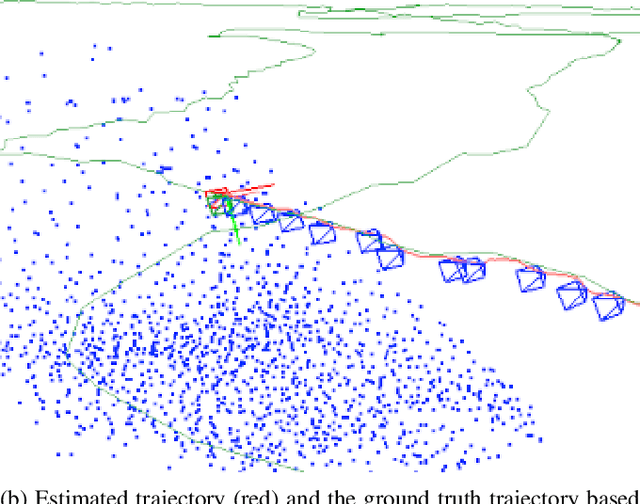
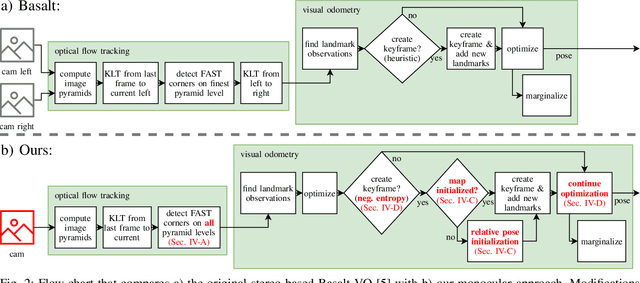
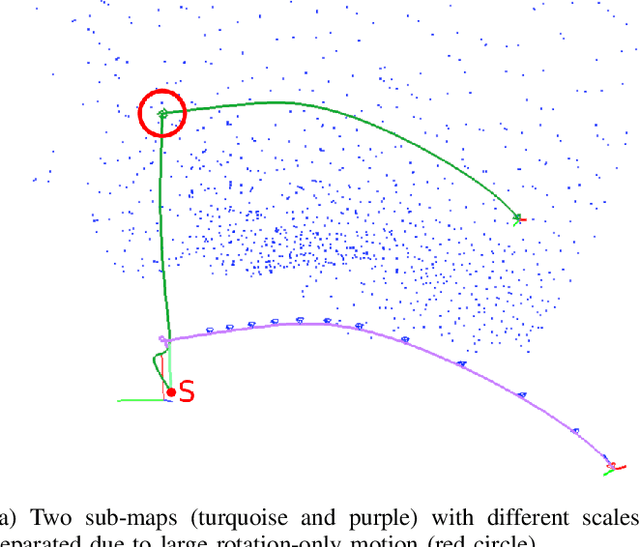
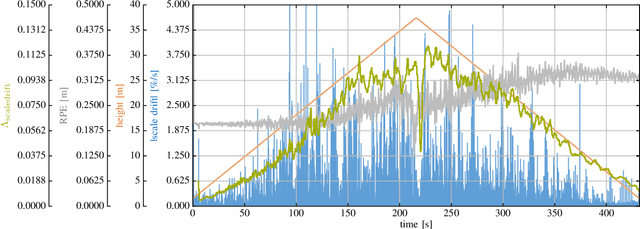
In the future, extraterrestrial expeditions will not only be conducted by rovers but also by flying robots. The technical demonstration drone Ingenuity, that just landed on Mars, will mark the beginning of a new era of exploration unhindered by terrain traversability. Robust self-localization is crucial for that. Cameras that are lightweight, cheap and information-rich sensors are already used to estimate the ego-motion of vehicles. However, methods proven to work in man-made environments cannot simply be deployed on other planets. The highly repetitive textures present in the wastelands of Mars pose a huge challenge to descriptor matching based approaches. In this paper, we present an advanced robust monocular odometry algorithm that uses efficient optical flow tracking to obtain feature correspondences between images and a refined keyframe selection criterion. In contrast to most other approaches, our framework can also handle rotation-only motions that are particularly challenging for monocular odometry systems. Furthermore, we present a novel approach to estimate the current risk of scale drift based on a principal component analysis of the relative translation information matrix. This way we obtain an implicit measure of uncertainty. We evaluate the validity of our approach on all sequences of a challenging real-world dataset captured in a Mars-like environment and show that it outperforms state-of-the-art approaches.
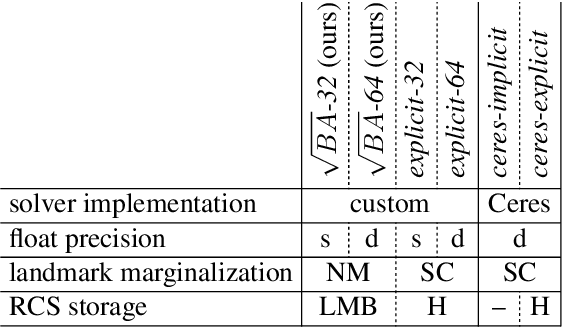
Square Root Marginalization for Sliding-Window Bundle Adjustment
Sep 05, 2021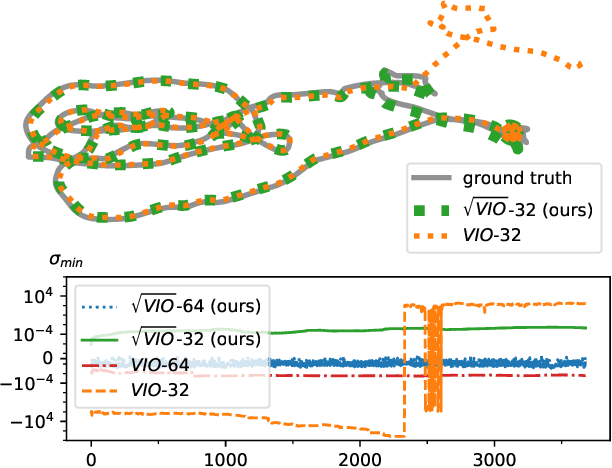
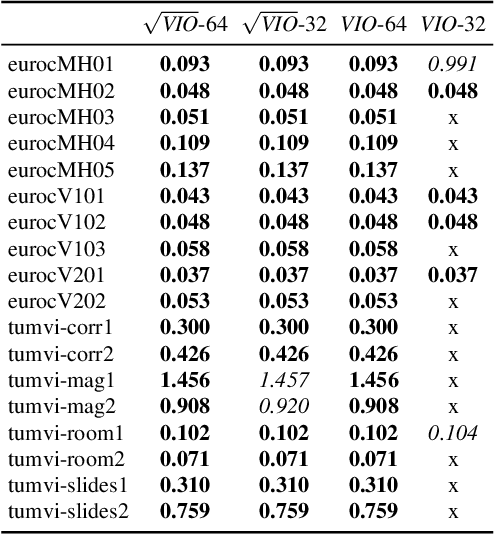
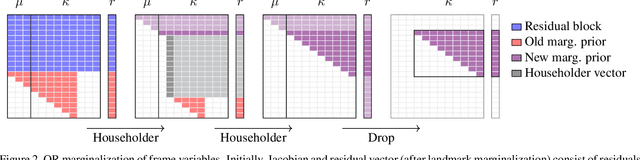
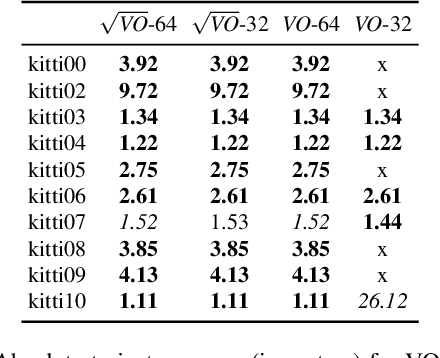
In this paper we propose a novel square root sliding-window bundle adjustment suitable for real-time odometry applications. The square root formulation pervades three major aspects of our optimization-based sliding-window estimator: for bundle adjustment we eliminate landmark variables with nullspace projection; to store the marginalization prior we employ a matrix square root of the Hessian; and when marginalizing old poses we avoid forming normal equations and update the square root prior directly with a specialized QR decomposition. We show that the proposed square root marginalization is algebraically equivalent to the conventional use of Schur complement (SC) on the Hessian. Moreover, it elegantly deals with rank-deficient Jacobians producing a prior equivalent to SC with Moore-Penrose inverse. Our evaluation of visual and visual-inertial odometry on real-world datasets demonstrates that the proposed estimator is 36% faster than the baseline. It furthermore shows that in single precision, conventional Hessian-based marginalization leads to numeric failures and reduced accuracy. We analyse numeric properties of the marginalization prior to explain why our square root form does not suffer from the same effect and therefore entails superior performance.
TUM-VIE: The TUM Stereo Visual-Inertial Event Dataset
Aug 16, 2021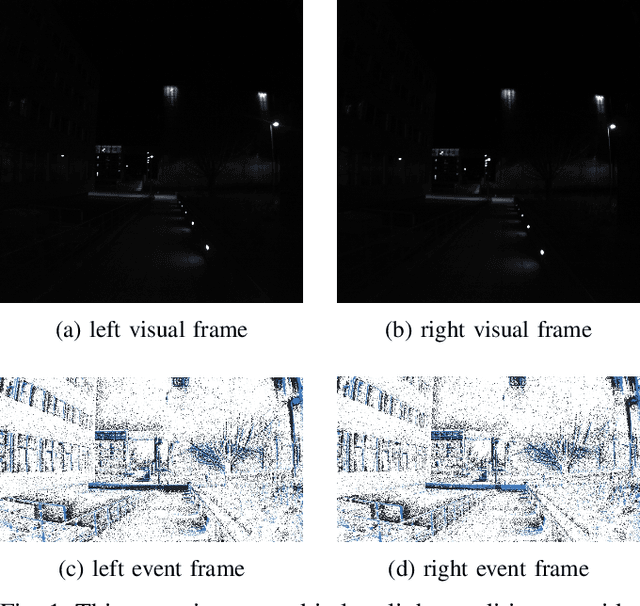
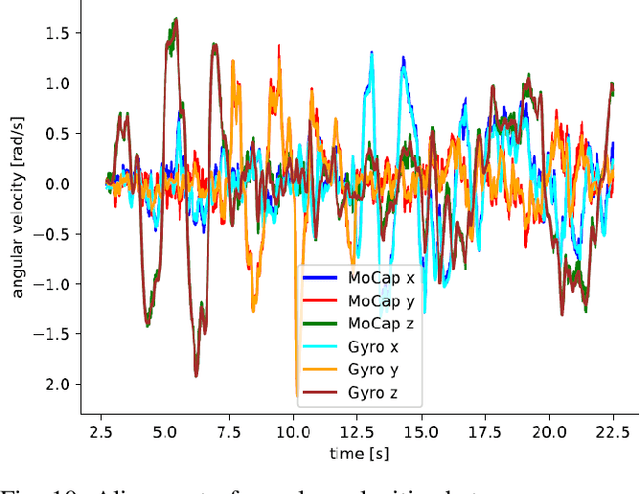
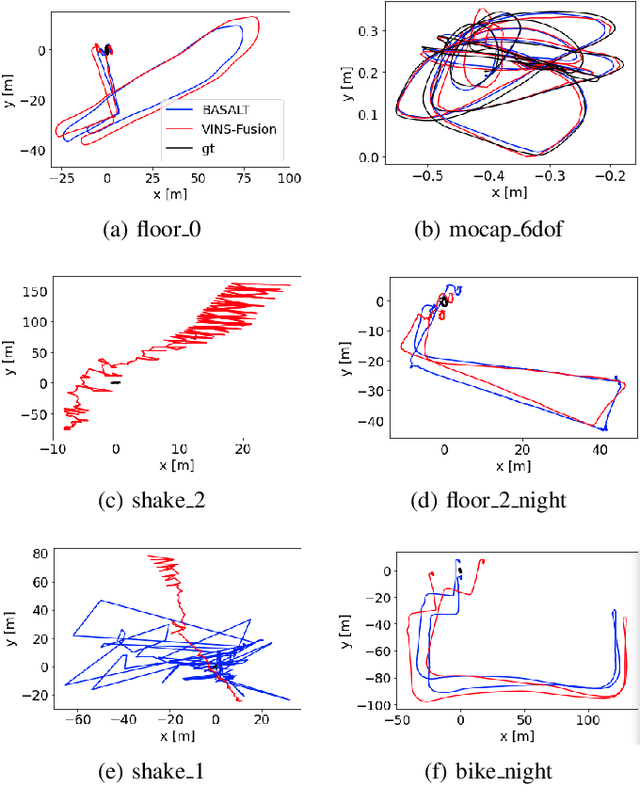
Event cameras are bio-inspired vision sensors which measure per pixel brightness changes. They offer numerous benefits over traditional, frame-based cameras, including low latency, high dynamic range, high temporal resolution and low power consumption. Thus, these sensors are suited for robotics and virtual reality applications. To foster the development of 3D perception and navigation algorithms with event cameras, we present the TUM-VIE dataset. It consists of a large variety of handheld and head-mounted sequences in indoor and outdoor environments, including rapid motion during sports and high dynamic range scenarios. The dataset contains stereo event data, stereo grayscale frames at 20Hz as well as IMU data at 200Hz. Timestamps between all sensors are synchronized in hardware. The event cameras contain a large sensor of 1280x720 pixels, which is significantly larger than the sensors used in existing stereo event datasets (at least by a factor of ten). We provide ground truth poses from a motion capture system at 120Hz during the beginning and end of each sequence, which can be used for trajectory evaluation. TUM-VIE includes challenging sequences where state-of-the art visual SLAM algorithms either fail or result in large drift. Hence, our dataset can help to push the boundary of future research on event-based visual-inertial perception algorithms.
Square Root Bundle Adjustment for Large-Scale Reconstruction
Mar 30, 2021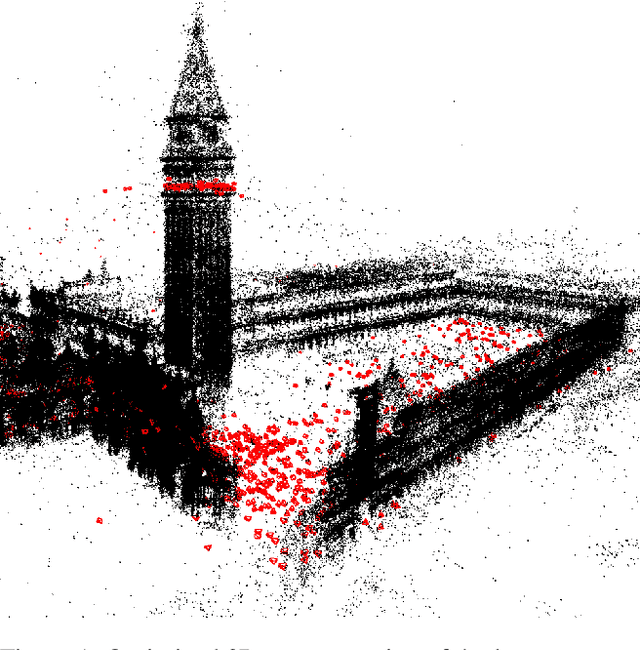
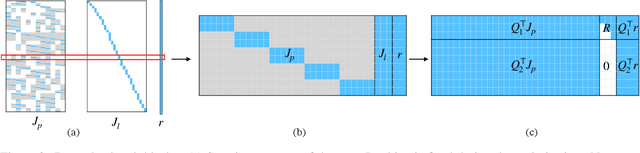
We propose a new formulation for the bundle adjustment problem which relies on nullspace marginalization of landmark variables by QR decomposition. Our approach, which we call square root bundle adjustment, is algebraically equivalent to the commonly used Schur complement trick, improves the numeric stability of computations, and allows for solving large-scale bundle adjustment problems with single-precision floating-point numbers. We show in real-world experiments with the BAL datasets that even in single precision the proposed solver achieves on average equally accurate solutions compared to Schur complement solvers using double precision. It runs significantly faster, but can require larger amounts of memory on dense problems. The proposed formulation relies on simple linear algebra operations and opens the way for efficient implementations of bundle adjustment on hardware platforms optimized for single-precision linear algebra processing.
Efficient Derivative Computation for Cumulative B-Splines on Lie Groups
Nov 20, 2019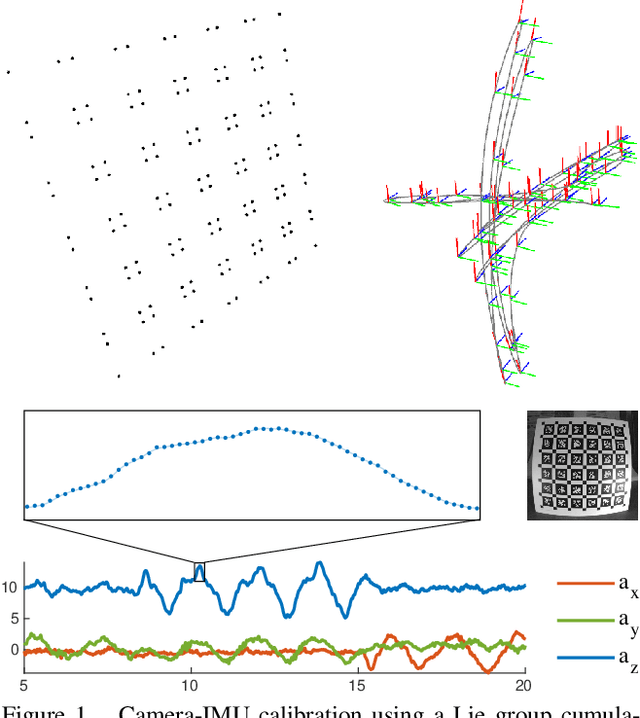
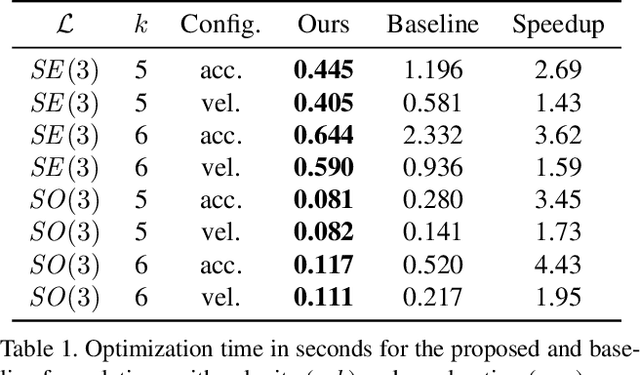
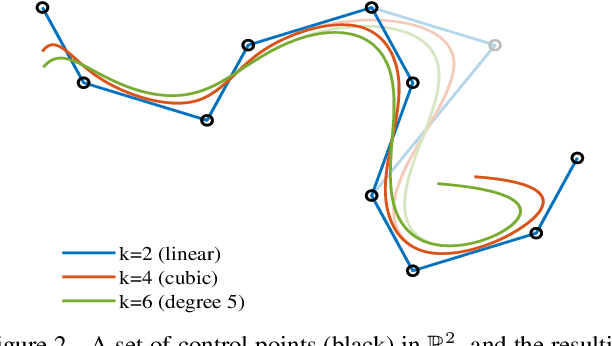

Continuous-time trajectory representation has recently gained popularity for tasks where the fusion of high-frame-rate sensors and multiple unsynchronized devices is required. Lie group cumulative B-splines are a popular way of representing continuous trajectories without singularities. They have been used in near real-time SLAM and odometry systems with IMU, LiDAR, regular, RGB-D and event cameras, as well as for offline calibration. These applications require efficient computation of time derivatives (velocity, acceleration), but all prior works rely on a computationally suboptimal formulation. In this work we present an alternative derivation of time derivatives based on recurrence relations that needs $\mathcal{O}(k)$ instead of $\mathcal{O}(k^2)$ matrix operations (for a spline of order $k$) and results in simple and elegant expressions. While producing the same result, the proposed approach significantly speeds up the trajectory optimization and allows for computing simple analytic derivatives with respect to spline knots. The results presented in this paper pave the way for incorporating continuous-time trajectory representations into more applications where real-time performance is required.
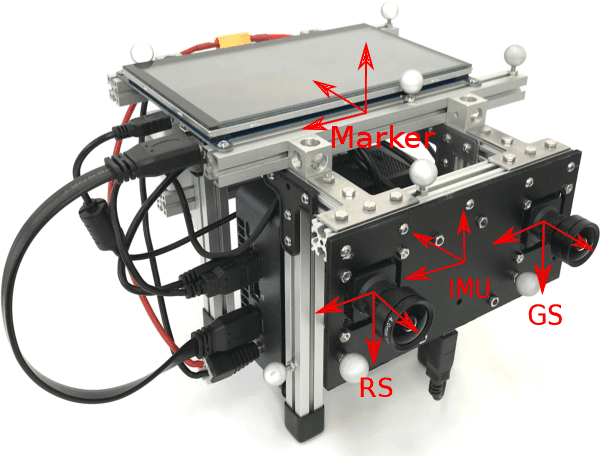
Rolling-Shutter Modelling for Direct Visual-Inertial Odometry
Nov 04, 2019

We present a direct visual-inertial odometry (VIO) method which estimates the motion of the sensor setup and sparse 3D geometry of the environment based on measurements from a rolling-shutter camera and an inertial measurement unit (IMU). The visual part of the system performs a photometric bundle adjustment on a sparse set of points. This direct approach does not extract feature points and is able to track not only corners, but any pixels with sufficient gradient magnitude. Neglecting rolling-shutter effects in the visual part severely degrades accuracy and robustness of the system. In this paper, we incorporate a rolling-shutter model into the photometric bundle adjustment that estimates a set of recent keyframe poses and the inverse depth of a sparse set of points. IMU information is accumulated between several frames using measurement preintegration, and is inserted into the optimization as an additional constraint between selected keyframes. For every keyframe we estimate not only the pose but also velocity and biases to correct the IMU measurements. Unlike systems with global-shutter cameras, we use both IMU measurements and rolling-shutter effects of the camera to estimate velocity and biases for every state. Last, we evaluate our system on a novel dataset that contains global-shutter and rolling-shutter images, IMU data and ground-truth poses for ten different sequences, which we make publicly available. Evaluation shows that the proposed method outperforms a system where rolling shutter is not modelled and achieves similar accuracy to the global-shutter method on global-shutter data.