 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirectTracker: 3D Multi-Object Tracking Using Direct Image Alignment and Photometric Bundle Adjustment
Paper and Code
Sep 29, 2022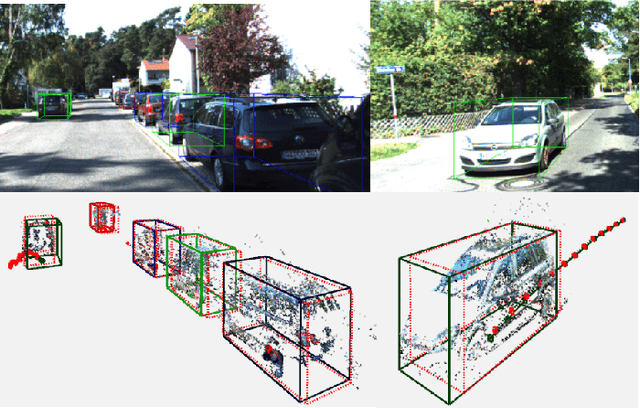
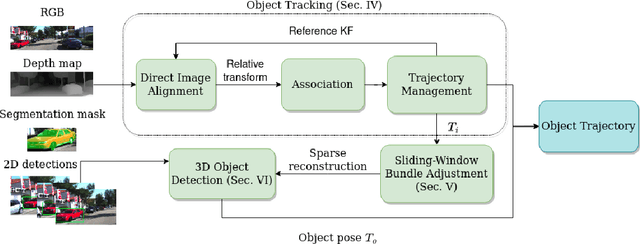


Direct methods have shown excellent performance in the applications of visual odometry and SLAM. In this work we propose to leverage their effectiveness for the task of 3D multi-object tracking. To this end, we propose DirectTracker, a framework that effectively combines direct image alignment for the short-term tracking and sliding-window photometric bundle adjustment for 3D object detection. Object proposals are estimated based on the sparse sliding-window pointcloud and further refined using an optimization-based cost function that carefully combines 3D and 2D cues to ensure consistency in image and world space. We propose to evaluate 3D tracking using the recently introduced higher-order tracking accuracy (HOTA) metric and the generalized intersection over union similarity measure to mitigate the limitations of the conventional use of intersection over union for the evaluation of vision-based trackers. We perform evaluation on the KITTI Tracking benchmark for the Car class and show competitive performance in tracking objects both in 2D and 3D.