 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRolling-Shutter Modelling for Direct Visual-Inertial Odometry
Paper and Code

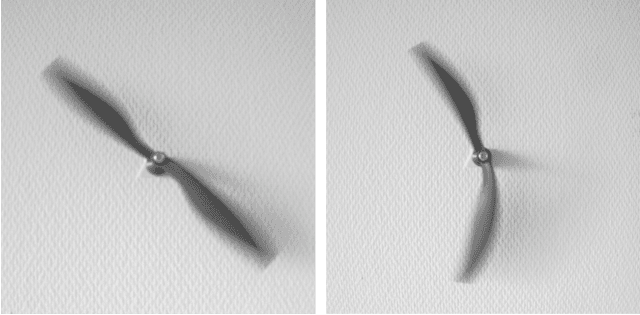

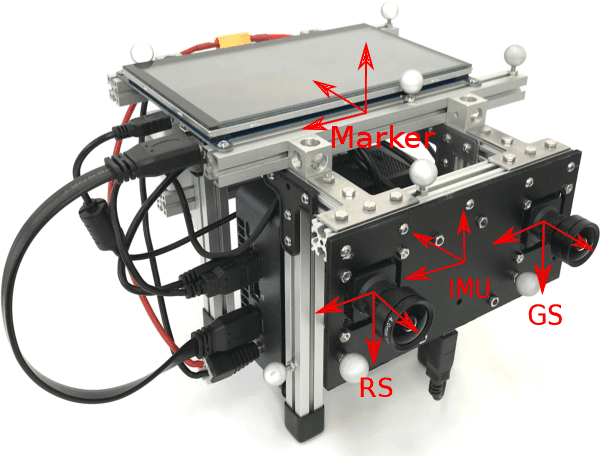
We present a direct visual-inertial odometry (VIO) method which estimates the motion of the sensor setup and sparse 3D geometry of the environment based on measurements from a rolling-shutter camera and an inertial measurement unit (IMU). The visual part of the system performs a photometric bundle adjustment on a sparse set of points. This direct approach does not extract feature points and is able to track not only corners, but any pixels with sufficient gradient magnitude. Neglecting rolling-shutter effects in the visual part severely degrades accuracy and robustness of the system. In this paper, we incorporate a rolling-shutter model into the photometric bundle adjustment that estimates a set of recent keyframe poses and the inverse depth of a sparse set of points. IMU information is accumulated between several frames using measurement preintegration, and is inserted into the optimization as an additional constraint between selected keyframes. For every keyframe we estimate not only the pose but also velocity and biases to correct the IMU measurements. Unlike systems with global-shutter cameras, we use both IMU measurements and rolling-shutter effects of the camera to estimate velocity and biases for every state. Last, we evaluate our system on a novel dataset that contains global-shutter and rolling-shutter images, IMU data and ground-truth poses for ten different sequences, which we make publicly available. Evaluation shows that the proposed method outperforms a system where rolling shutter is not modelled and achieves similar accuracy to the global-shutter method on global-shutter data.