 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-To-End Causal Effect Estimation from Unstructured Natural Language Data
Jul 09, 2024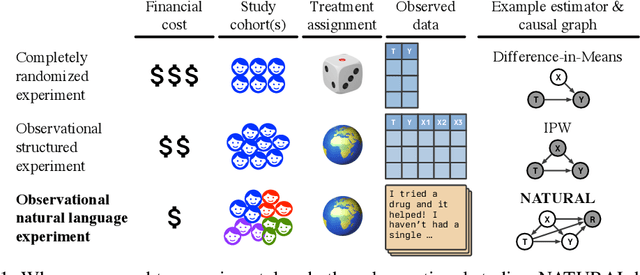
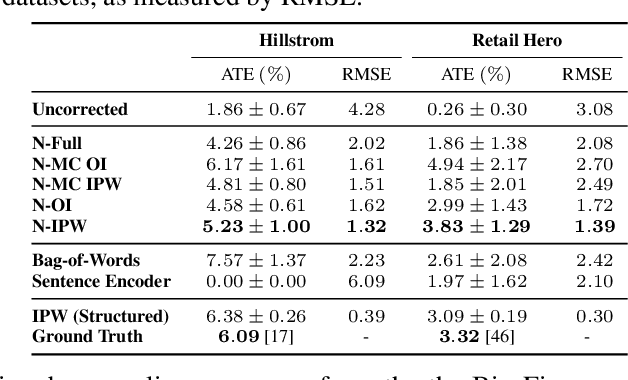
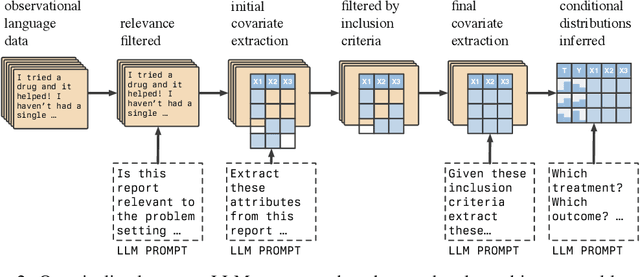

Knowing the effect of an intervention is critical for human decision-making, but current approaches for causal effect estimation rely on manual data collection and structuring, regardless of the causal assumptions. This increases both the cost and time-to-completion for studies. We show how large, diverse observational text data can be mined with large language models (LLMs) to produce inexpensive causal effect estimates under appropriate causal assumptions. We introduce NATURAL, a novel family of causal effect estimators built with LLMs that operate over datasets of unstructured text. Our estimators use LLM conditional distributions (over variables of interest, given the text data) to assist in the computation of classical estimators of causal effect. We overcome a number of technical challenges to realize this idea, such as automating data curation and using LLMs to impute missing information. We prepare six (two synthetic and four real) observational datasets, paired with corresponding ground truth in the form of randomized trials, which we used to systematically evaluate each step of our pipeline. NATURAL estimators demonstrate remarkable performance, yielding causal effect estimates that fall within 3 percentage points of their ground truth counterparts, including on real-world Phase 3/4 clinical trials. Our results suggest that unstructured text data is a rich source of causal effect information, and NATURAL is a first step towards an automated pipeline to tap this resource.
Leveraging Function Space Aggregation for Federated Learning at Scale
Nov 17, 2023
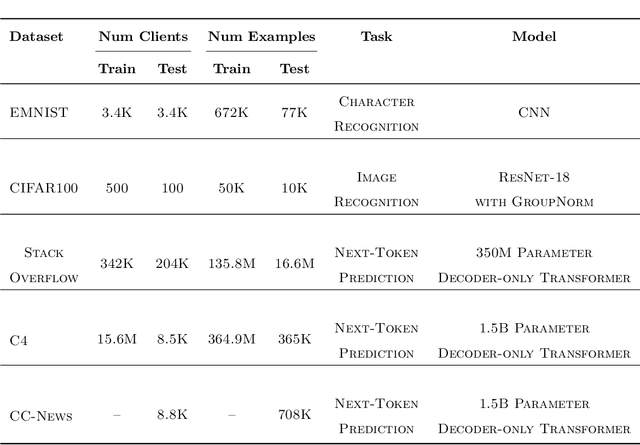
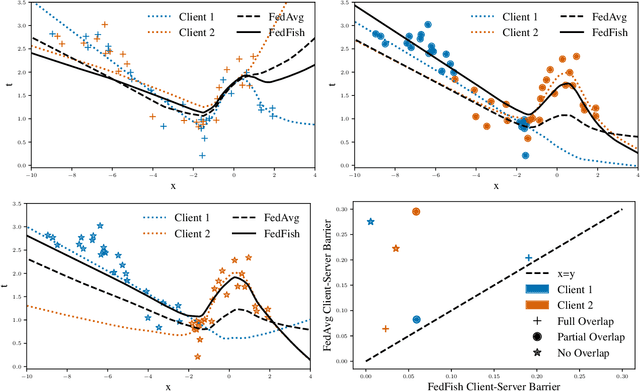
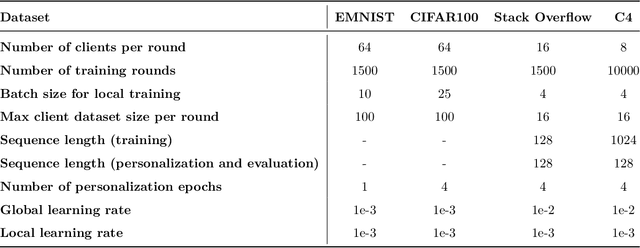
The federated learning paradigm has motivated the development of methods for aggregating multiple client updates into a global server model, without sharing client data. Many federated learning algorithms, including the canonical Federated Averaging (FedAvg), take a direct (possibly weighted) average of the client parameter updates, motivated by results in distributed optimization. In this work, we adopt a function space perspective and propose a new algorithm, FedFish, that aggregates local approximations to the functions learned by clients, using an estimate based on their Fisher information. We evaluate FedFish on realistic, large-scale cross-device benchmarks. While the performance of FedAvg can suffer as client models drift further apart, we demonstrate that FedFish is more robust to longer local training. Our evaluation across several settings in image and language benchmarks shows that FedFish outperforms FedAvg as local training epochs increase. Further, FedFish results in global networks that are more amenable to efficient personalization via local fine-tuning on the same or shifted data distributions. For instance, federated pretraining on the C4 dataset, followed by few-shot personalization on Stack Overflow, results in a 7% improvement in next-token prediction by FedFish over FedAvg.
Efficient Parametric Approximations of Neural Network Function Space Distance
Feb 07, 2023It is often useful to compactly summarize important properties of model parameters and training data so that they can be used later without storing and/or iterating over the entire dataset. As a specific case, we consider estimating the Function Space Distance (FSD) over a training set, i.e. the average discrepancy between the outputs of two neural networks. We propose a Linearized Activation Function TRick (LAFTR) and derive an efficient approximation to FSD for ReLU neural networks. The key idea is to approximate the architecture as a linear network with stochastic gating. Despite requiring only one parameter per unit of the network, our approach outcompetes other parametric approximations with larger memory requirements. Applied to continual learning, our parametric approximation is competitive with state-of-the-art nonparametric approximations, which require storing many training examples. Furthermore, we show its efficacy in estimating influence functions accurately and detecting mislabeled examples without expensive iterations over the entire dataset.
Dataset Inference for Self-Supervised Models
Sep 16, 2022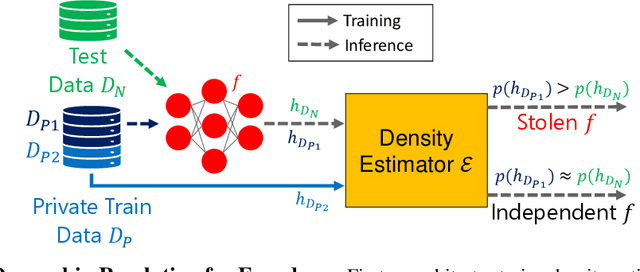
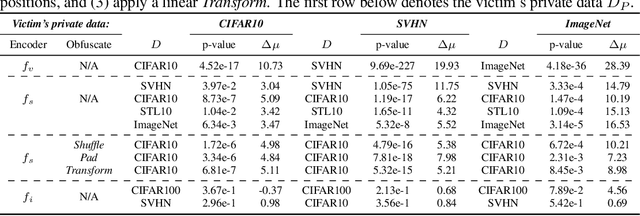
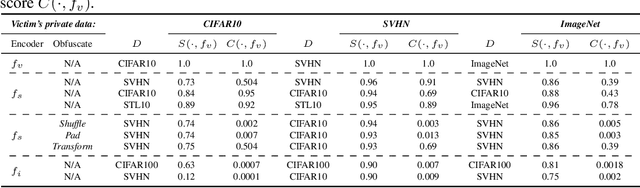
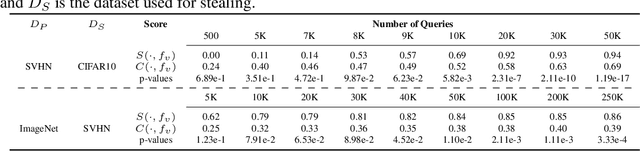
Self-supervised models are increasingly prevalent in machine learning (ML) since they reduce the need for expensively labeled data. Because of their versatility in downstream applications, they are increasingly used as a service exposed via public APIs. At the same time, these encoder models are particularly vulnerable to model stealing attacks due to the high dimensionality of vector representations they output. Yet, encoders remain undefended: existing mitigation strategies for stealing attacks focus on supervised learning. We introduce a new dataset inference defense, which uses the private training set of the victim encoder model to attribute its ownership in the event of stealing. The intuition is that the log-likelihood of an encoder's output representations is higher on the victim's training data than on test data if it is stolen from the victim, but not if it is independently trained. We compute this log-likelihood using density estimation models. As part of our evaluation, we also propose measuring the fidelity of stolen encoders and quantifying the effectiveness of the theft detection without involving downstream tasks; instead, we leverage mutual information and distance measurements. Our extensive empirical results in the vision domain demonstrate that dataset inference is a promising direction for defending self-supervised models against model stealing.
On the Difficulty of Defending Self-Supervised Learning against Model Extraction
May 16, 2022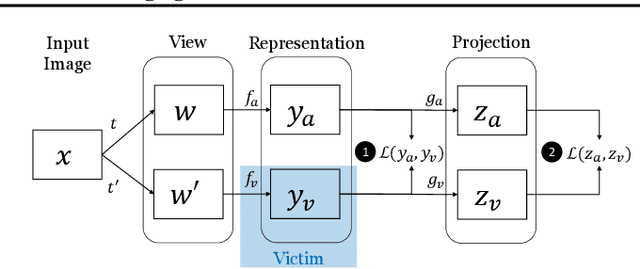
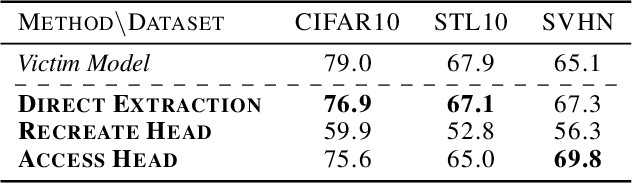
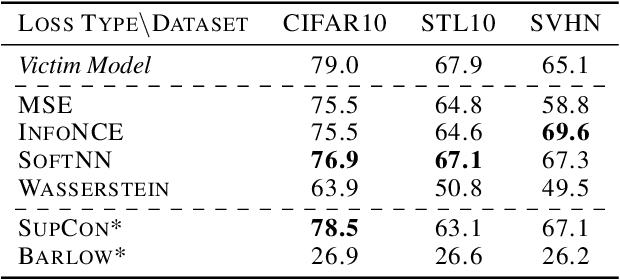
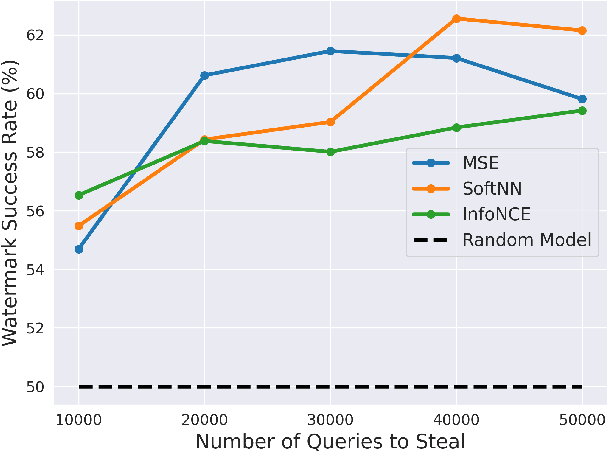
Self-Supervised Learning (SSL) is an increasingly popular ML paradigm that trains models to transform complex inputs into representations without relying on explicit labels. These representations encode similarity structures that enable efficient learning of multiple downstream tasks. Recently, ML-as-a-Service providers have commenced offering trained SSL models over inference APIs, which transform user inputs into useful representations for a fee. However, the high cost involved to train these models and their exposure over APIs both make black-box extraction a realistic security threat. We thus explore model stealing attacks against SSL. Unlike traditional model extraction on classifiers that output labels, the victim models here output representations; these representations are of significantly higher dimensionality compared to the low-dimensional prediction scores output by classifiers. We construct several novel attacks and find that approaches that train directly on a victim's stolen representations are query efficient and enable high accuracy for downstream models. We then show that existing defenses against model extraction are inadequate and not easily retrofitted to the specificities of SSL.
AVID: Learning Multi-Stage Tasks via Pixel-Level Translation of Human Videos
Dec 10, 2019



Robotic reinforcement learning (RL) holds the promise of enabling robots to learn complex behaviors through experience. However, realizing this promise requires not only effective and scalable RL algorithms, but also mechanisms to reduce human burden in terms of defining the task and resetting the environment. In this paper, we study how these challenges can be alleviated with an automated robotic learning framework, in which multi-stage tasks are defined simply by providing videos of a human demonstrator and then learned autonomously by the robot from raw image observations. A central challenge in imitating human videos is the difference in morphology between the human and robot, which typically requires manual correspondence. We instead take an automated approach and perform pixel-level image translation via CycleGAN to convert the human demonstration into a video of a robot, which can then be used to construct a reward function for a model-based RL algorithm. The robot then learns the task one stage at a time, automatically learning how to reset each stage to retry it multiple times without human-provided resets. This makes the learning process largely automatic, from intuitive task specification via a video to automated training with minimal human intervention. We demonstrate that our approach is capable of learning complex tasks, such as operating a coffee machine, directly from raw image observations, requiring only 20 minutes to provide human demonstrations and about 180 minutes of robot interaction with the environment. A supplementary video depicting the experimental setup, learning process, and our method's final performance is available from https://sites.google.com/view/icra20avid