 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Suspension: A Two-phase Methodology for Concluding Sports Leagues
Mar 29, 2024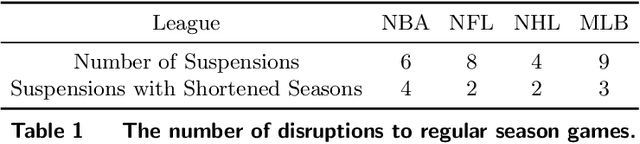
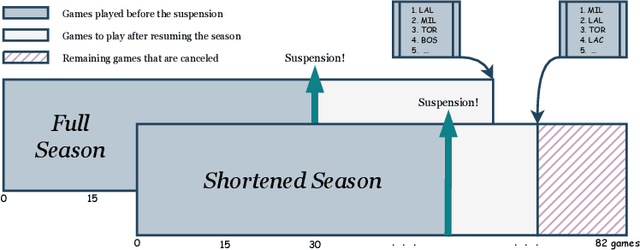
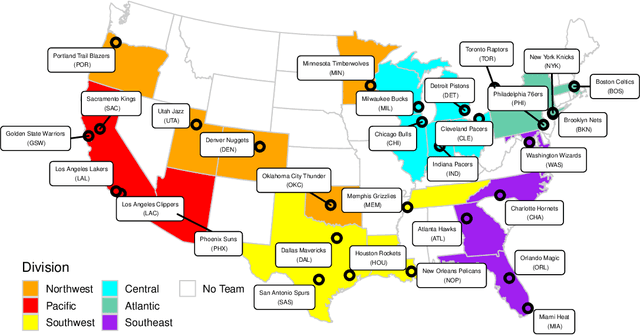
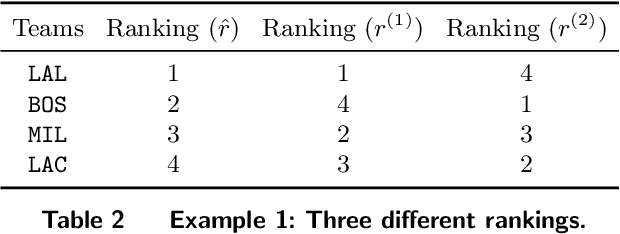
Problem definition: Professional sports leagues may be suspended due to various reasons such as the recent COVID-19 pandemic. A critical question the league must address when re-opening is how to appropriately select a subset of the remaining games to conclude the season in a shortened time frame. Academic/practical relevance: Despite the rich literature on scheduling an entire season starting from a blank slate, concluding an existing season is quite different. Our approach attempts to achieve team rankings similar to that which would have resulted had the season been played out in full. Methodology: We propose a data-driven model which exploits predictive and prescriptive analytics to produce a schedule for the remainder of the season comprised of a subset of originally-scheduled games. Our model introduces novel rankings-based objectives within a stochastic optimization model, whose parameters are first estimated using a predictive model. We introduce a deterministic equivalent reformulation along with a tailored Frank-Wolfe algorithm to efficiently solve our problem, as well as a robust counterpart based on min-max regret. Results: We present simulation-based numerical experiments from previous National Basketball Association (NBA) seasons 2004--2019, and show that our models are computationally efficient, outperform a greedy benchmark that approximates a non-rankings-based scheduling policy, and produce interpretable results. Managerial implications: Our data-driven decision-making framework may be used to produce a shortened season with 25-50\% fewer games while still producing an end-of-season ranking similar to that of the full season, had it been played.
RoboCup 2022 AdultSize Winner NimbRo: Upgraded Perception, Capture Steps Gait and Phase-based In-walk Kicks
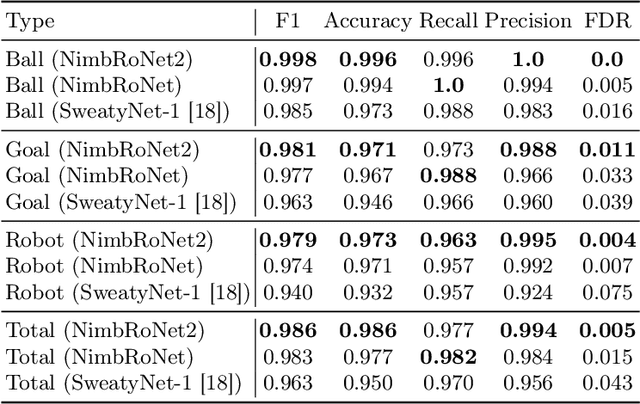
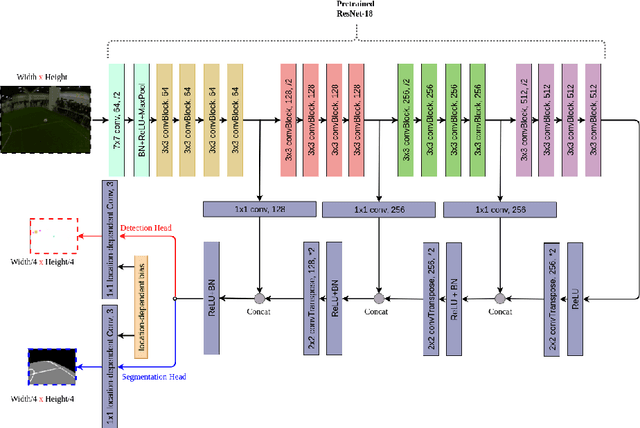
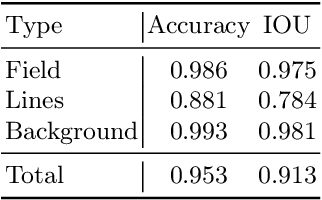
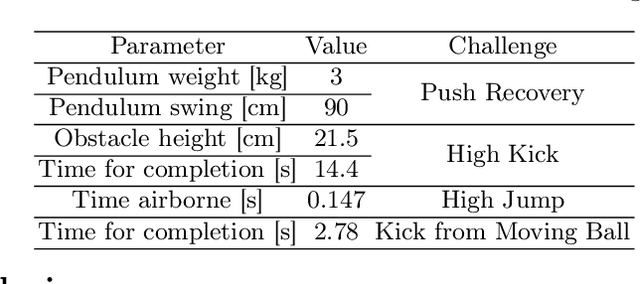
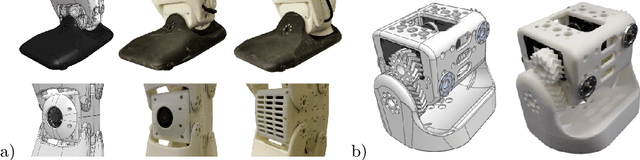
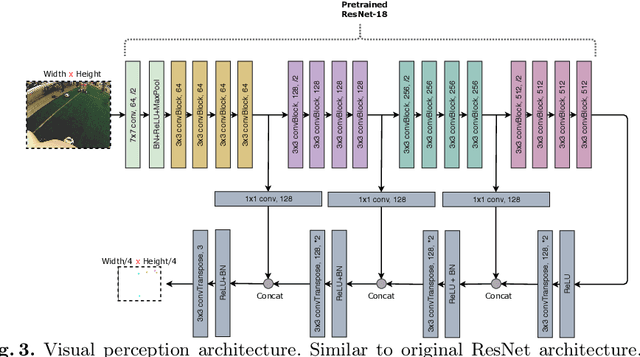
Feb 07, 2023Beating the human world champions by 2050 is an ambitious goal of the Humanoid League that provides a strong incentive for RoboCup teams to further improve and develop their systems. In this paper, we present upgrades of our system which enabled our team NimbRo to win the Soccer Tournament, the Drop-in Games, and the Technical Challenges in the Humanoid AdultSize League of RoboCup 2022. Strong performance in these competitions resulted in the Best Humanoid award in the Humanoid League. The mentioned upgrades include: hardware upgrade of the vision module, balanced walking with Capture Steps, and the introduction of phase-based in-walk kicks.
State Estimation for Hybrid Locomotion of Driving-Stepping Quadrupeds
Nov 21, 2022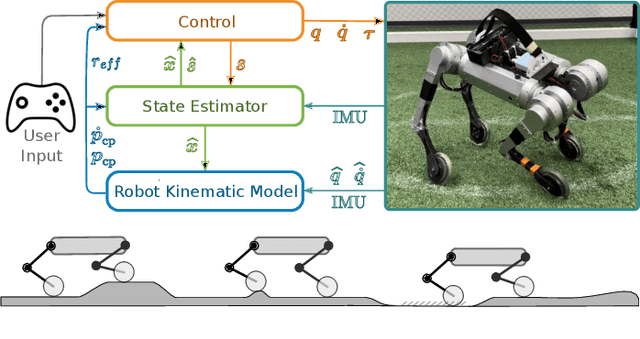
Fast and versatile locomotion can be achieved with wheeled quadruped robots that drive quickly on flat terrain, but are also able to overcome challenging terrain by adapting their body pose and by making steps. In this paper, we present a state estimation approach for four-legged robots with non-steerable wheels that enables hybrid driving-stepping locomotion capabilities. We formulate a Kalman Filter (KF) for state estimation that integrates driven wheels into the filter equations and estimates the robot state (position and velocity) as well as the contribution of driving with wheels to the above state. Our estimation approach allows us to use the control framework of the Mini Cheetah quadruped robot with minor modifications. We tested our approach on this robot that we augmented with actively driven wheels in simulation and in the real world. The experimental results are available at https://www.ais.uni-bonn.de/%7Ehosseini/se-dsq .
RoboCup 2019 AdultSize Winner NimbRo: Deep Learning Perception, In-Walk Kick, Push Recovery, and Team Play Capabilities
Dec 17, 2019
Individual and team capabilities are challenged every year by rule changes and the increasing performance of the soccer teams at RoboCup Humanoid League. For RoboCup 2019 in the AdultSize class, the number of players (2 vs. 2 games) and the field dimensions were increased, which demanded for team coordination and robust visual perception and localization modules. In this paper, we present the latest developments that lead team NimbRo to win the soccer tournament, drop-in games, technical challenges and the Best Humanoid Award of the RoboCup Humanoid League 2019 in Sydney. These developments include a deep learning vision system, in-walk kicks, step-based push-recovery, and team play strategies.
NimbRo Robots Winning RoboCup 2018 Humanoid AdultSize Soccer Competitions
Sep 05, 2019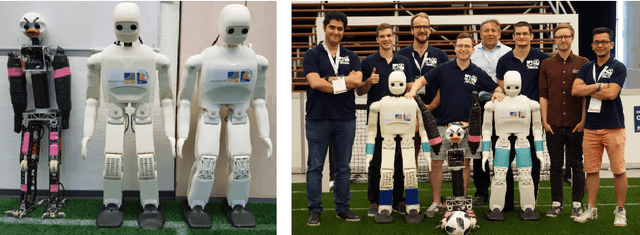
Over the past few years, the Humanoid League rules have changed towards more realistic and challenging game environments, which encourage teams to advance their robot soccer performances. In this paper, we present the software and hardware designs that led our team NimbRo to win the competitions in the AdultSize league -- including the soccer tournament, the drop-in games, and the technical challenges at RoboCup 2018 in Montreal. Altogether, this resulted in NimbRo winning the Best Humanoid Award. In particular, we describe our deep-learning approaches for visual perception and our new fully 3D printed robot NimbRo-OP2X.
NimbRo-OP2X: Adult-sized Open-source 3D Printed Humanoid Robot
Oct 19, 2018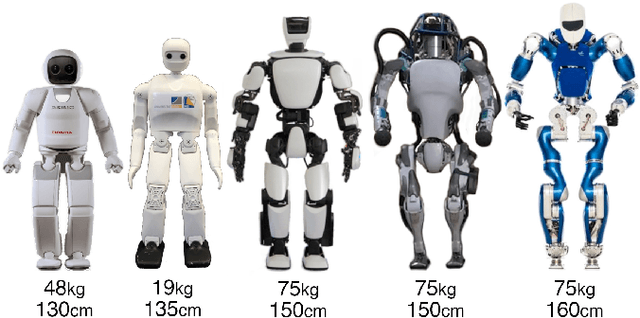
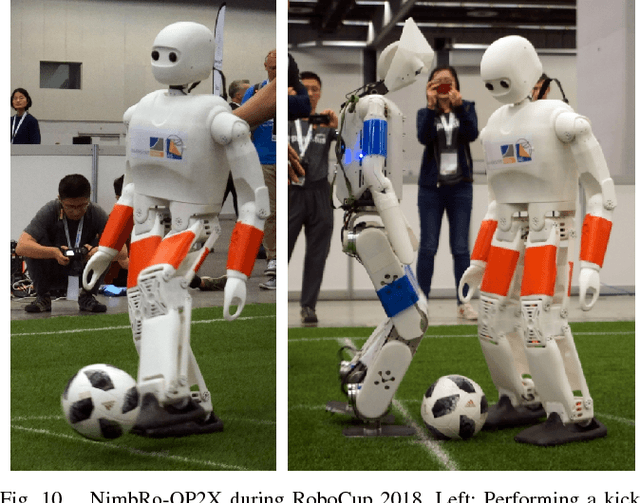
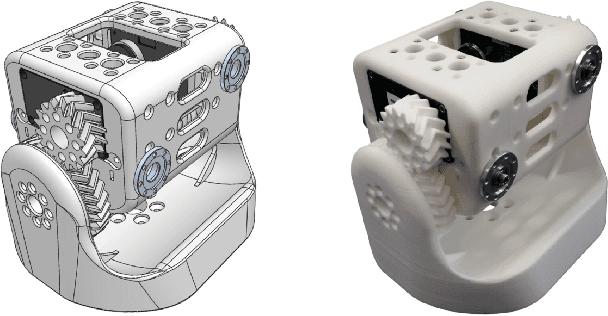
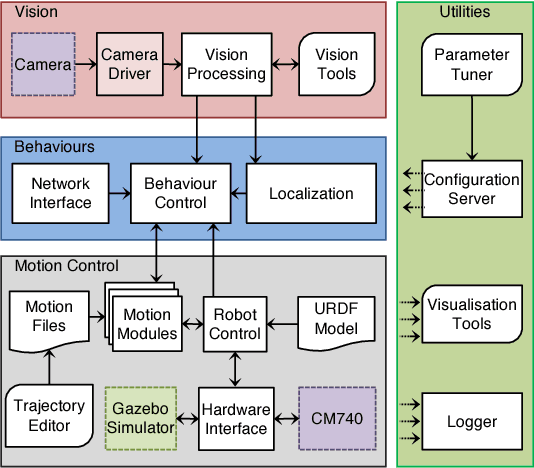
Humanoid robotics research depends on capable robot platforms, but recently developed advanced platforms are often not available to other research groups, expensive, dangerous to operate, or closed-source. The lack of available platforms forces researchers to work with smaller robots, which have less strict dynamic constraints or with simulations, which lack many real-world effects. We developed NimbRo-OP2X to address this need. At a height of 135 cm our robot is large enough to interact in a human environment. Its low weight of only 19 kg makes the operation of the robot safe and easy, as no special operational equipment is necessary. Our robot is equipped with a fast onboard computer and a GPU to accelerate parallel computations. We extend our already open-source software by a deep-learning based vision system and gait parameter optimisation. The NimbRo-OP2X was evaluated during RoboCup 2018 in Montr\'eal, Canada, where it won all possible awards in the Humanoid AdultSize class.
Real-Time Anomalous Behavior Detection and Localization in Crowded Scenes
Jan 02, 2016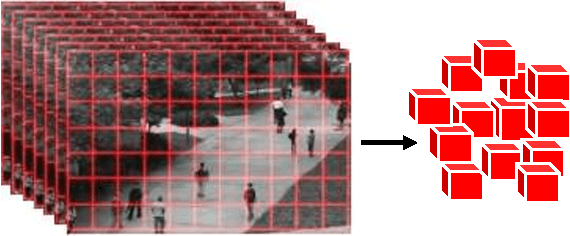
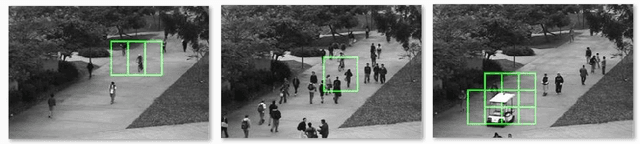
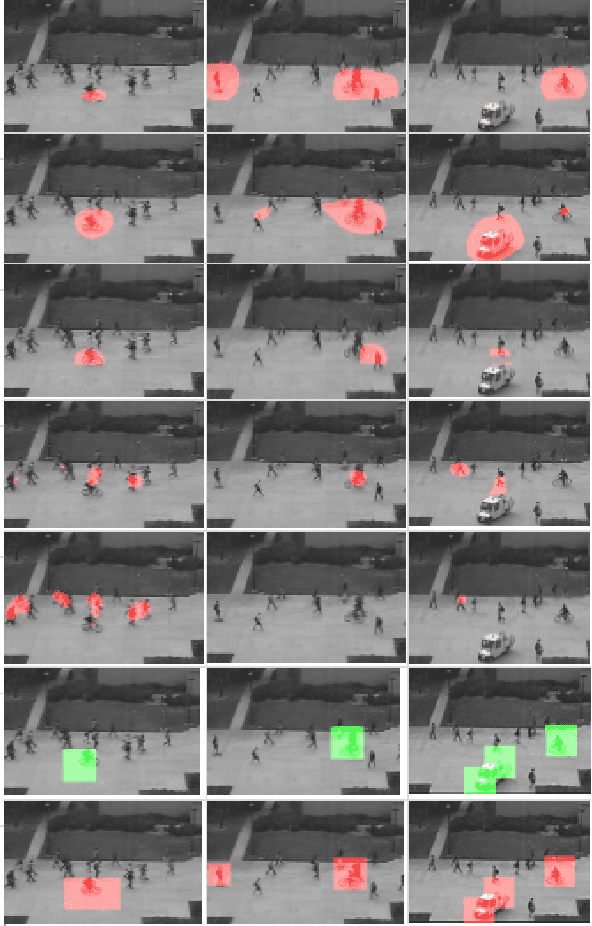
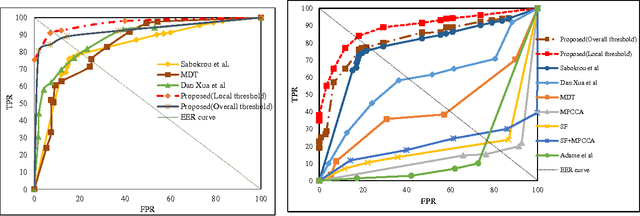
In this paper, we propose an accurate and real-time anomaly detection and localization in crowded scenes, and two descriptors for representing anomalous behavior in video are proposed. We consider a video as being a set of cubic patches. Based on the low likelihood of an anomaly occurrence, and the redundancy of structures in normal patches in videos, two (global and local) views are considered for modeling the video. Our algorithm has two components, for (1) representing the patches using local and global descriptors, and for (2) modeling the training patches using a new representation. We have two Gaussian models for all training patches respect to global and local descriptors. The local and global features are based on structure similarity between adjacent patches and the features that are learned in an unsupervised way. We propose a fusion strategy to combine the two descriptors as the output of our system. Experimental results show that our algorithm performs like a state-of-the-art method on several standard datasets, but even is more time-efficient.
Real-Time Anomaly Detection and Localization in Crowded Scenes
Nov 21, 2015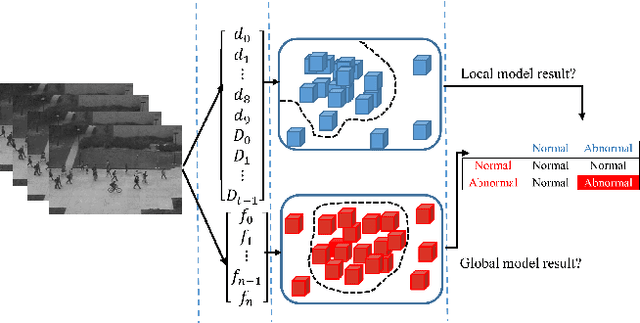
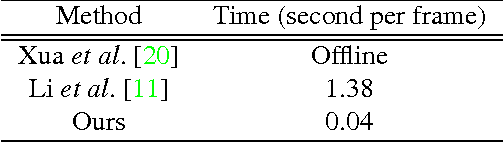
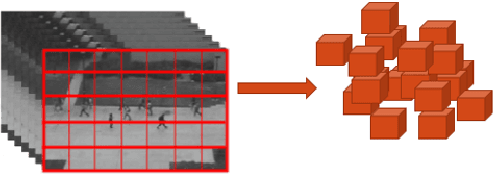
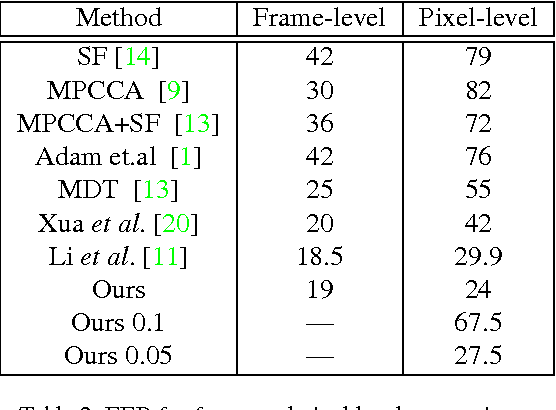
In this paper, we propose a method for real-time anomaly detection and localization in crowded scenes. Each video is defined as a set of non-overlapping cubic patches, and is described using two local and global descriptors. These descriptors capture the video properties from different aspects. By incorporating simple and cost-effective Gaussian classifiers, we can distinguish normal activities and anomalies in videos. The local and global features are based on structure similarity between adjacent patches and the features learned in an unsupervised way, using a sparse auto- encoder. Experimental results show that our algorithm is comparable to a state-of-the-art procedure on UCSD ped2 and UMN benchmarks, but even more time-efficient. The experiments confirm that our system can reliably detect and localize anomalies as soon as they happen in a video.