 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Approaches for Modelling Target Behaviour
Oct 14, 2024



The performance of tracking algorithms strongly depends on the chosen model assumptions regarding the target dynamics. If there is a strong mismatch between the chosen model and the true object motion, the track quality may be poor or the track is easily lost. Still, the true dynamics might not be known a priori or it is too complex to be expressed in a tractable mathematical formulation. This paper provides a comparative study between three different methods that use machine learning to describe the underlying object motion based on training data. The first method builds on Gaussian Processes (GPs) for predicting the object motion, the second learns the parameters of an Interacting Multiple Model (IMM) filter and the third uses a Long Short-Term Memory (LSTM) network as a motion model. All methods are compared against an Extended Kalman Filter (EKF) with an analytic motion model as a benchmark and their respective strengths are highlighted in one simulated and two real-world scenarios.
Learning IMM Filter Parameters from Measurements using Gradient Descent
Jul 13, 2023



The performance of data fusion and tracking algorithms often depends on parameters that not only describe the sensor system, but can also be task-specific. While for the sensor system tuning these variables is time-consuming and mostly requires expert knowledge, intrinsic parameters of targets under track can even be completely unobservable until the system is deployed. With state-of-the-art sensor systems growing more and more complex, the number of parameters naturally increases, necessitating the automatic optimization of the model variables. In this paper, the parameters of an interacting multiple model (IMM) filter are optimized solely using measurements, thus without necessity for any ground-truth data. The resulting method is evaluated through an ablation study on simulated data, where the trained model manages to match the performance of a filter parametrized with ground-truth values.
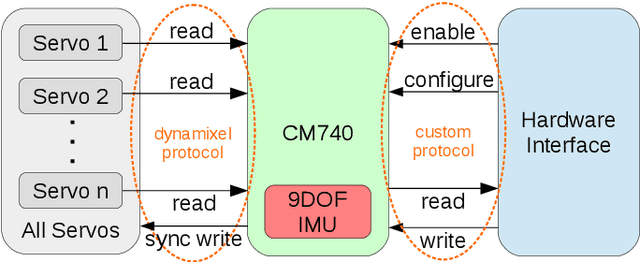
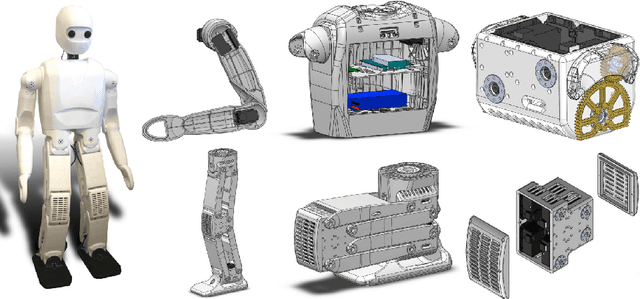
NimbRo-OP2X: Adult-sized Open-source 3D Printed Humanoid Robot
Oct 19, 2018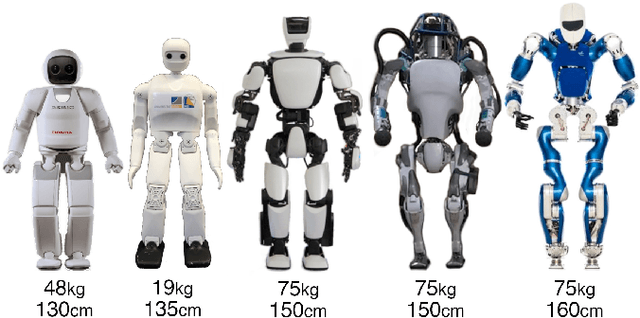
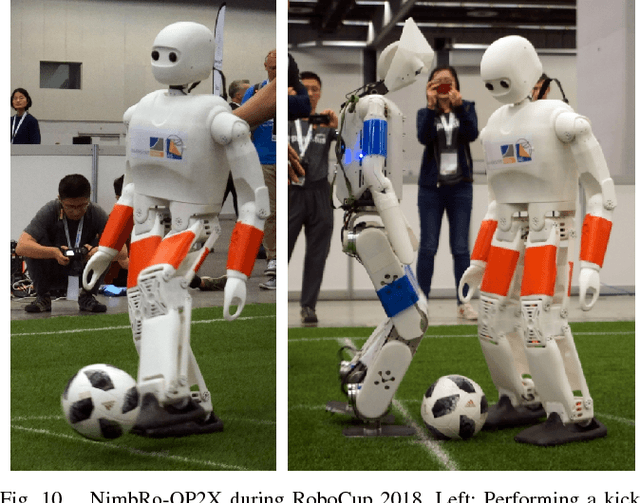
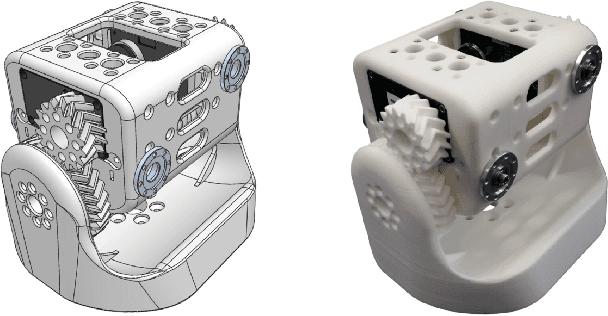
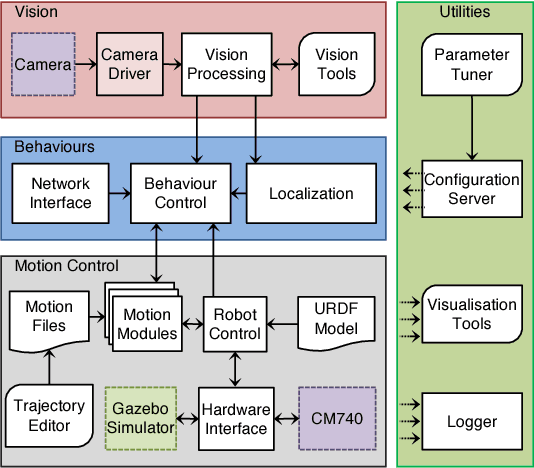
Humanoid robotics research depends on capable robot platforms, but recently developed advanced platforms are often not available to other research groups, expensive, dangerous to operate, or closed-source. The lack of available platforms forces researchers to work with smaller robots, which have less strict dynamic constraints or with simulations, which lack many real-world effects. We developed NimbRo-OP2X to address this need. At a height of 135 cm our robot is large enough to interact in a human environment. Its low weight of only 19 kg makes the operation of the robot safe and easy, as no special operational equipment is necessary. Our robot is equipped with a fast onboard computer and a GPU to accelerate parallel computations. We extend our already open-source software by a deep-learning based vision system and gait parameter optimisation. The NimbRo-OP2X was evaluated during RoboCup 2018 in Montr\'eal, Canada, where it won all possible awards in the Humanoid AdultSize class.
RoboCup 2016 Humanoid TeenSize Winner NimbRo: Robust Visual Perception and Soccer Behaviors
Sep 28, 2018
The trend in the RoboCup Humanoid League rules over the past few years has been towards a more realistic and challenging game environment. Elementary skills such as visual perception and walking, which had become mature enough for exciting gameplay, are now once again core challenges. The field goals are both white, and the walking surface is artificial grass, which constitutes a much more irregular surface than the carpet used before. In this paper, team NimbRo TeenSize, the winner of the TeenSize class of the RoboCup 2016 Humanoid League, presents its robotic platforms, the adaptations that had to be made to them, and the newest developments in visual perception and soccer behaviour.
* RoboCup 2016: Robot World Cup XX, Lecture Notes in Computer Science 9776, Springer, 2017
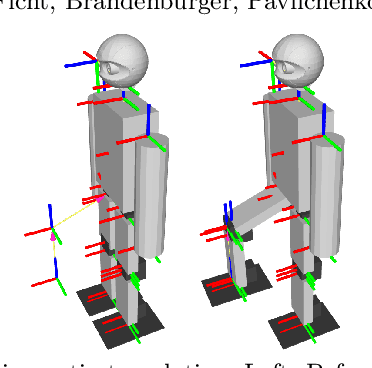
Combining Simulations and Real-robot Experiments for Bayesian Optimization of Bipedal Gait Stabilization
Sep 14, 2018
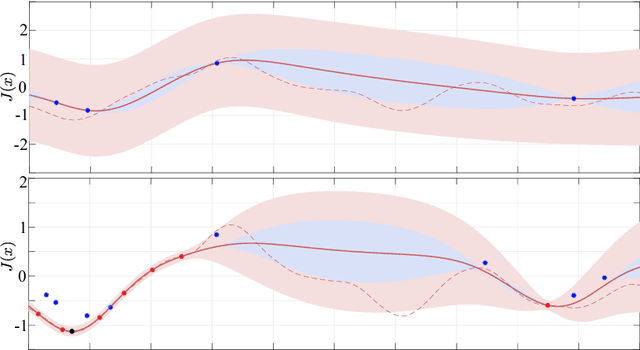

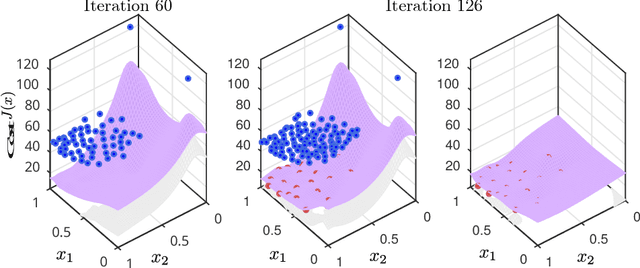
Walking controllers often require parametrization which must be tuned according to some cost function. To estimate these parameters, simulations can be performed which are cheap but do not fully represent reality. Real-robot experiments, on the other hand, are more expensive and lead to hardware wear-off. In this paper, we propose an approach for combining simulations and real experiments to learn gait stabilization parameters. We use a Bayesian optimization method which selects the most informative points in parameter space to evaluate based on the entropy of the cost function to optimize. Experiments with the igus Humanoid Open Platform demonstrate the effectiveness of our approach.
Advanced Soccer Skills and Team Play of RoboCup 2017 TeenSize Winner NimbRo
Sep 14, 2018


In order to pursue the vision of the RoboCup Humanoid League of beating the soccer world champion by 2050, new rules and competitions are added or modified each year fostering novel technological advances. In 2017, the number of players in the TeenSize class soccer games was increase to 3 vs. 3, which allowed for more team play strategies. Improvements in individual skills were also demanded through a set of technical challenges. This paper presents the latest individual skills and team play developments used in RoboCup 2017 that lead our team Nimbro winning the 2017 TeenSize soccer tournament, the technical challenges, and the drop-in games.
* In Proceedings of 21th RoboCup International Symposium, Nagoya, Japan
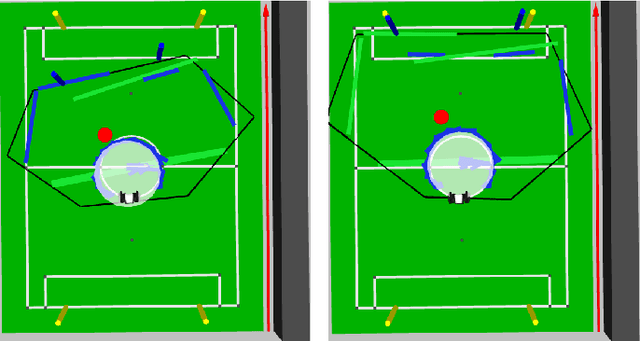
Grown-up NimbRo Robots Winning RoboCup 2017 Humanoid AdultSize Soccer Competitions
Sep 13, 2018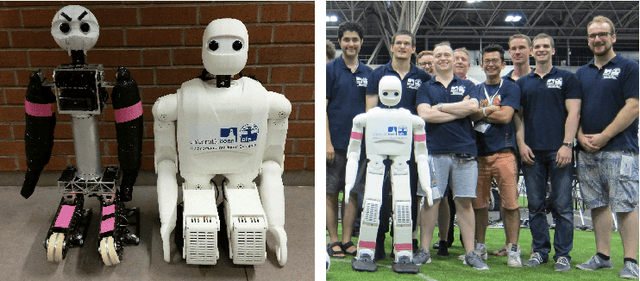


The ongoing evolution of the RoboCup Humanoid League led in 2017 to the introduction of one vs. one soccer games for the AdultSize robots, which motived our team NimbRo to enter this category. In this paper, we present the mechatronic design of our upgraded robot Copedo and the newly developed NimbRo-OP2, which received the RoboCup Design Award. We also describe improved approaches to visual perception of the game situation, including compassless localization on a soccer field with symmetric appearance, and the generation of soccer behaviors. At RoboCup 2017 in Nagoya, our robots played very well, winning the AdultSize soccer tournament with high scores. Our robots also won the technical challenges and we present the developed solutions.