Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Simulations and Real-robot Experiments for Bayesian Optimization of Bipedal Gait Stabilization
Paper and Code
Sep 14, 2018
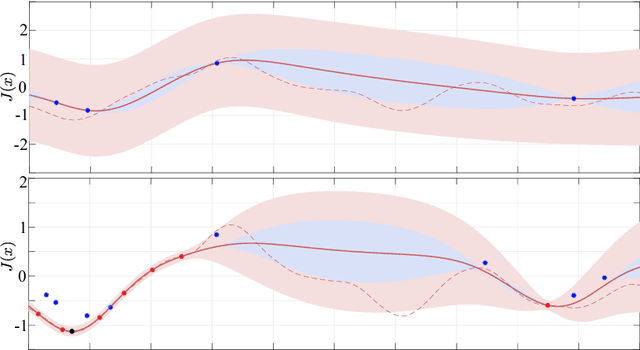

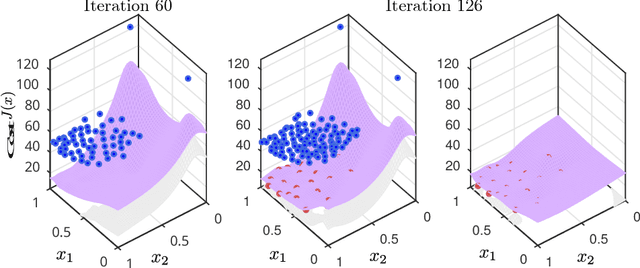
Walking controllers often require parametrization which must be tuned according to some cost function. To estimate these parameters, simulations can be performed which are cheap but do not fully represent reality. Real-robot experiments, on the other hand, are more expensive and lead to hardware wear-off. In this paper, we propose an approach for combining simulations and real experiments to learn gait stabilization parameters. We use a Bayesian optimization method which selects the most informative points in parameter space to evaluate based on the entropy of the cost function to optimize. Experiments with the igus Humanoid Open Platform demonstrate the effectiveness of our approach.
* In Proceedings of 22th RoboCup International Symposium, Montreal,
Canada
View paper on