 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvanced Soccer Skills and Team Play of RoboCup 2017 TeenSize Winner NimbRo
Sep 14, 2018


In order to pursue the vision of the RoboCup Humanoid League of beating the soccer world champion by 2050, new rules and competitions are added or modified each year fostering novel technological advances. In 2017, the number of players in the TeenSize class soccer games was increase to 3 vs. 3, which allowed for more team play strategies. Improvements in individual skills were also demanded through a set of technical challenges. This paper presents the latest individual skills and team play developments used in RoboCup 2017 that lead our team Nimbro winning the 2017 TeenSize soccer tournament, the technical challenges, and the drop-in games.
* In Proceedings of 21th RoboCup International Symposium, Nagoya, Japan
Grown-up NimbRo Robots Winning RoboCup 2017 Humanoid AdultSize Soccer Competitions
Sep 13, 2018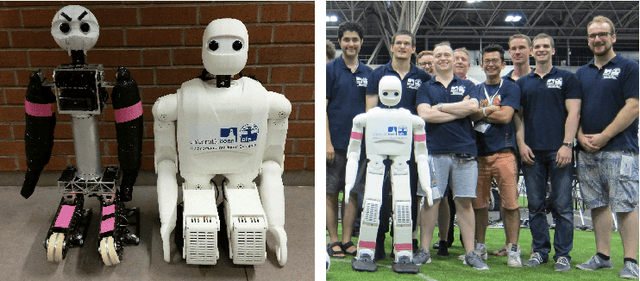

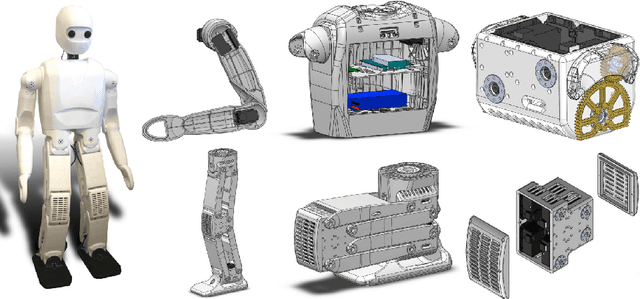

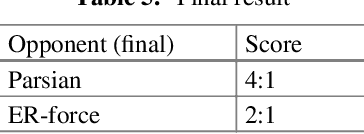
The ongoing evolution of the RoboCup Humanoid League led in 2017 to the introduction of one vs. one soccer games for the AdultSize robots, which motived our team NimbRo to enter this category. In this paper, we present the mechatronic design of our upgraded robot Copedo and the newly developed NimbRo-OP2, which received the RoboCup Design Award. We also describe improved approaches to visual perception of the game situation, including compassless localization on a soccer field with symmetric appearance, and the generation of soccer behaviors. At RoboCup 2017 in Nagoya, our robots played very well, winning the AdultSize soccer tournament with high scores. Our robots also won the technical challenges and we present the developed solutions.