 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAGILOped: Agile Open-Source Humanoid Robot for Research
Sep 11, 2025With academic and commercial interest for humanoid robots peaking, multiple platforms are being developed. Through a high level of customization, they showcase impressive performance. Most of these systems remain closed-source or have high acquisition and maintenance costs, however. In this work, we present AGILOped - an open-source humanoid robot that closes the gap between high performance and accessibility. Our robot is driven by off-the-shelf backdrivable actuators with high power density and uses standard electronic components. With a height of 110 cm and weighing only 14.5 kg, AGILOped can be operated without a gantry by a single person. Experiments in walking, jumping, impact mitigation and getting-up demonstrate its viability for use in research.
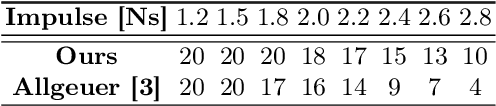
Maximum Impulse Approach to Soccer Kicking for Humanoid Robots
Dec 02, 2024We introduce an analytic method for generating a parametric and constraint-aware kick for humanoid robots. The kick is split into four phases with trajectories stemming from equations of motion with constant acceleration. To make the motion execution physically feasible, the kick duration alters the step frequency. The generated kicks seamlessly integrate within a ZMP-based gait, benefitting from the stability provided by the built-in controls. The whole approach has been evaluated in simulation and on a real NimbRo-OP2X humanoid robot.
RoboCup 2023 Humanoid AdultSize Winner NimbRo: NimbRoNet3 Visual Perception and Responsive Gait with Waveform In-walk Kicks
Jan 11, 2024



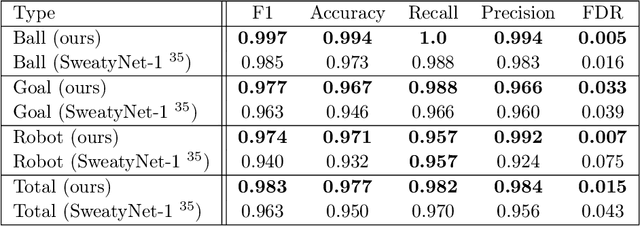
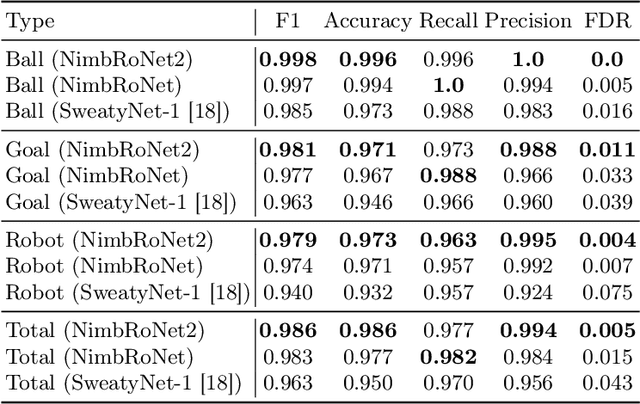
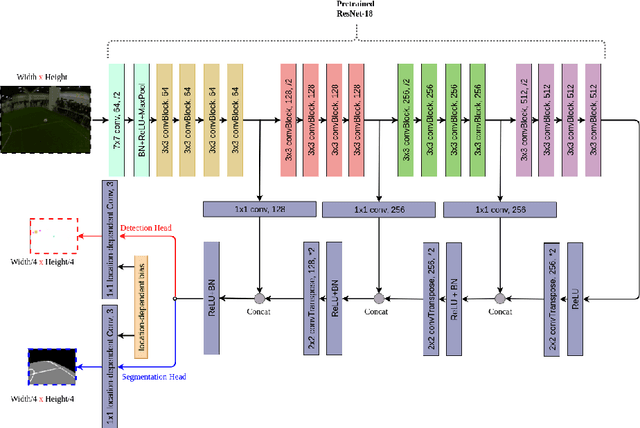
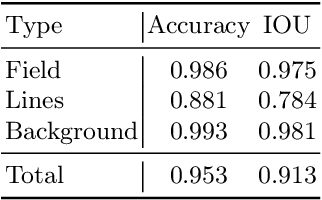
The RoboCup Humanoid League holds annual soccer robot world championships towards the long-term objective of winning against the FIFA world champions by 2050. The participating teams continuously improve their systems. This paper presents the upgrades to our humanoid soccer system, leading our team NimbRo to win the Soccer Tournament in the Humanoid AdultSize League at RoboCup 2023 in Bordeaux, France. The mentioned upgrades consist of: an updated model architecture for visual perception, extended fused angles feedback mechanisms and an additional COM-ZMP controller for walking robustness, and parametric in-walk kicks through waveforms.
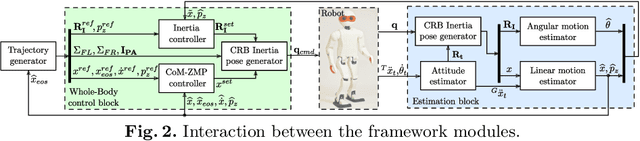
Centroidal State Estimation and Control for Hardware-constrained Humanoid Robots
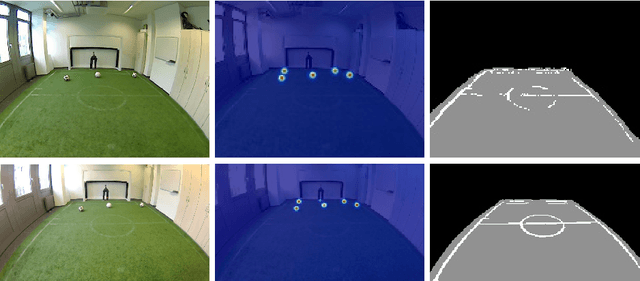
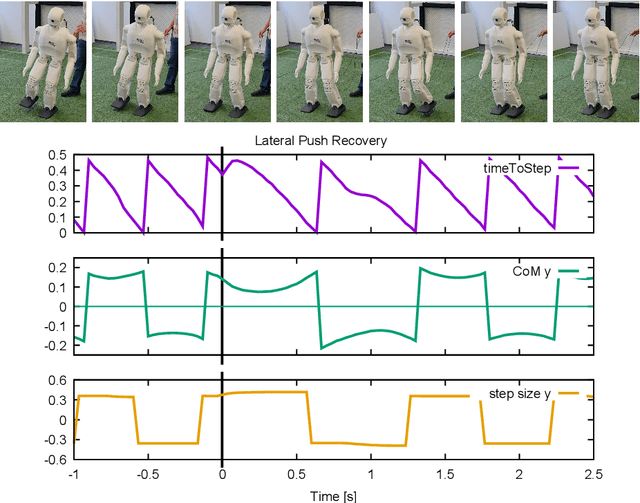
Dec 18, 2023We introduce novel methods for state estimation, feedforward and feedback control, which specifically target humanoid robots with hardware limitations. Our method combines a five-mass model with approximate dynamics of each mass. It enables acquiring an accurate assessment of the centroidal state and Center of Pressure, even when direct forms of force or contact sensing are unavailable. Upon this, we develop a feedforward scheme that operates on the centroidal state, accounting for insufficient joint tracking capabilities. Finally, we implement feedback mechanisms, which compensate for the lack in Degrees of Freedom that our NimbRo-OP2X robot has. The whole approach allows for reactive stepping to maintain balance despite these limitations, which was verified on hardware during RoboCup 2023, in Bordeaux, France.
RoboCup 2022 AdultSize Winner NimbRo: Upgraded Perception, Capture Steps Gait and Phase-based In-walk Kicks
Feb 07, 2023

Beating the human world champions by 2050 is an ambitious goal of the Humanoid League that provides a strong incentive for RoboCup teams to further improve and develop their systems. In this paper, we present upgrades of our system which enabled our team NimbRo to win the Soccer Tournament, the Drop-in Games, and the Technical Challenges in the Humanoid AdultSize League of RoboCup 2022. Strong performance in these competitions resulted in the Best Humanoid award in the Humanoid League. The mentioned upgrades include: hardware upgrade of the vision module, balanced walking with Capture Steps, and the introduction of phase-based in-walk kicks.
Direct Centroidal Control for Balanced Humanoid Locomotion
Aug 09, 2022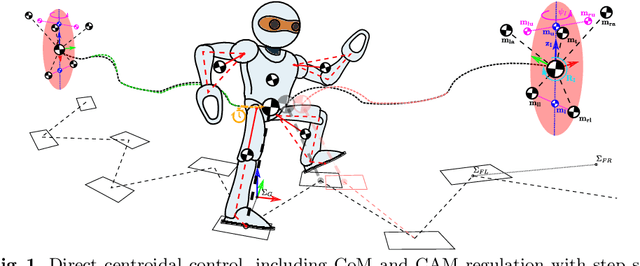
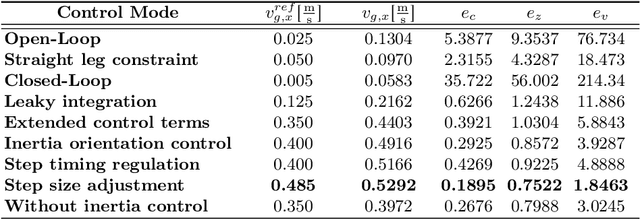
We present an integrated approach to locomotion and balancing of humanoid robots based on direct centroidal control. Our method uses a five-mass description of a humanoid. It generates whole-body motions from desired foot trajectories and centroidal parameters of the robot. A set of simplified models is used to formulate general and intuitive control laws, which are then applied in real-time for estimating and regulating the center of mass position and orientation of the multibody's principal axes of inertia. The combination of proposed algorithms produces a stretched-leg gait with naturally looking upper body motions. As only a 6-axis IMU and joint encoders are necessary for the implementation, the portability between robots is high. Our method has been experimentally verified using an igus Humanoid Open Platform, demonstrating whole-body locomotion and push rejection capabilities.
Bipedal Humanoid Hardware Design: A Technology Review
Mar 08, 2021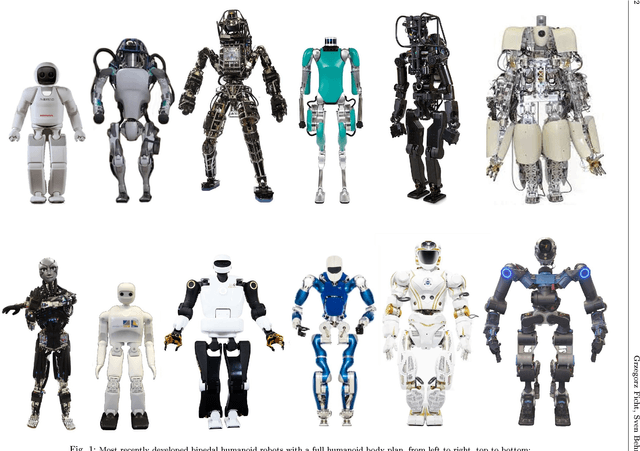
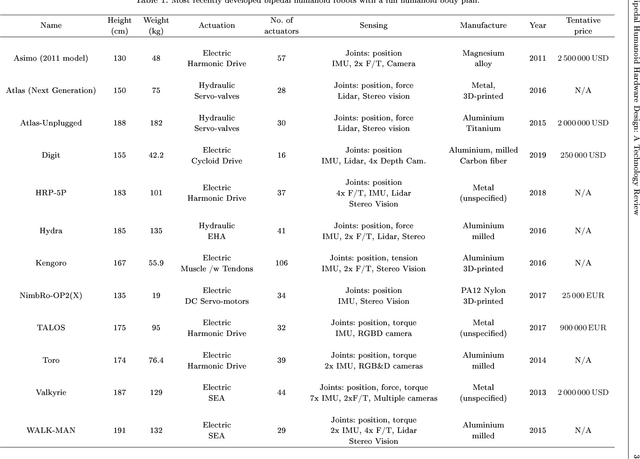
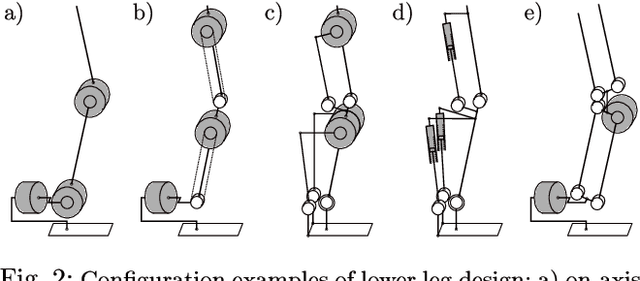
Purpose of Review: As new technological advancements are made, humanoid robots that utilise them are being designed and manufactured. For optimal design choices, a broad overview with insight on the advantages and disadvantages of available technologies is necessary. This article intends to provide an analysis on the established approaches and contrast them with emerging ones. Recent Findings: A clear shift in the recent design features of humanoid robots is developing, which is supported by literature. As humanoid robots are meant to leave laboratories and traverse the world, compliance and more efficient locomotion is necessary. The limitations of highly rigid actuation are being tackled by different research groups in unique ways. Some focus on modifying the kinematic structure, while others change the actuation scheme. With new manufacturing capabilities, previously impossible designs are becoming feasible. Summary: A comprehensive review on the technologies crucial for bipedal humanoid robots was performed. Different mechanical concepts have been discussed, along with the advancements in actuation, sensing and manufacturing. The paper is supplemented with a list of the recently developed platforms along with a selection of their specifications.
NimbRo-OP2X: Affordable Adult-sized 3D-printed Open-Source Humanoid Robot for Research
Oct 19, 2020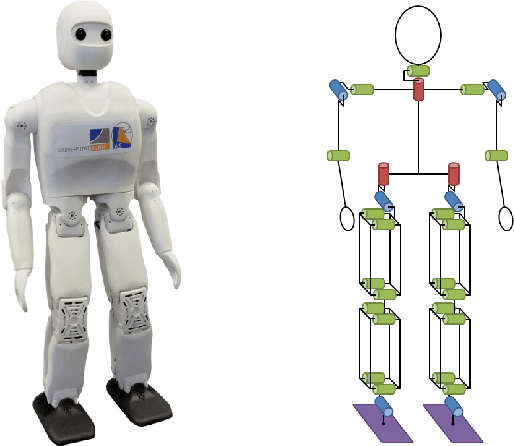
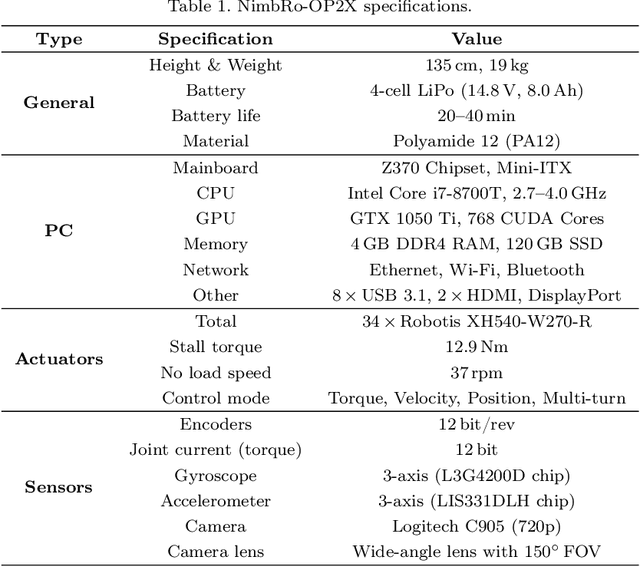
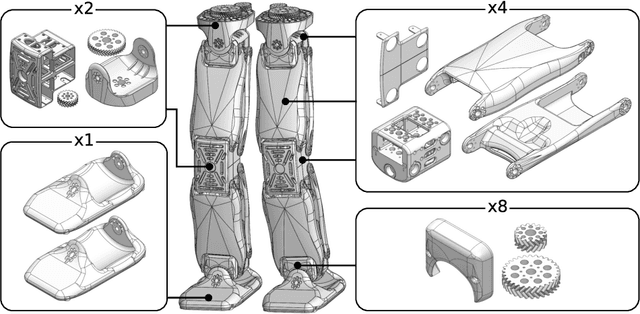
For several years, high development and production costs of humanoid robots restricted researchers interested in working in the field. To overcome this problem, several research groups have opted to work with simulated or smaller robots, whose acquisition costs are significantly lower. However, due to scale differences and imperfect simulation replicability, results may not be directly reproducible on real, adult-sized robots. In this paper, we present the NimbRo-OP2X, a capable and affordable adult-sized humanoid platform aiming to significantly lower the entry barrier for humanoid robot research. With a height of 135 cm and weight of only 19 kg, the robot can interact in an unmodified, human environment without special safety equipment. Modularity in hardware and software allow this platform enough flexibility to operate in different scenarios and applications with minimal effort. The robot is equipped with an on-board computer with GPU, which enables the implementation of state-of-the-art approaches for object detection and human perception demanded by areas such as manipulation and human-robot interaction. Finally, the capabilities of the NimbRo-OP2X, especially in terms of locomotion stability and visual perception, are evaluated. This includes the performance at RoboCup 2018, where NimbRo-OP2X won all possible awards in the AdultSize class.
Fast Whole-Body Motion Control of Humanoid Robots with Inertia Constraints
Jul 13, 2020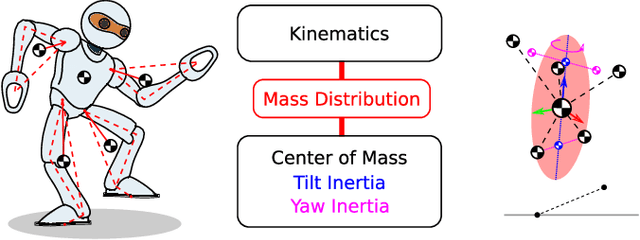

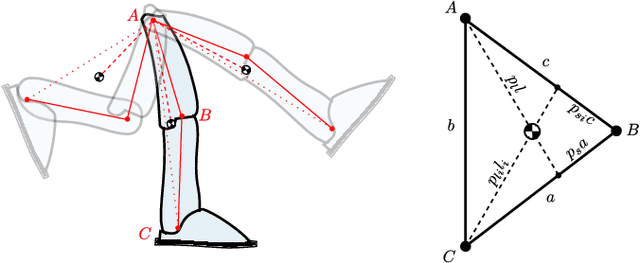
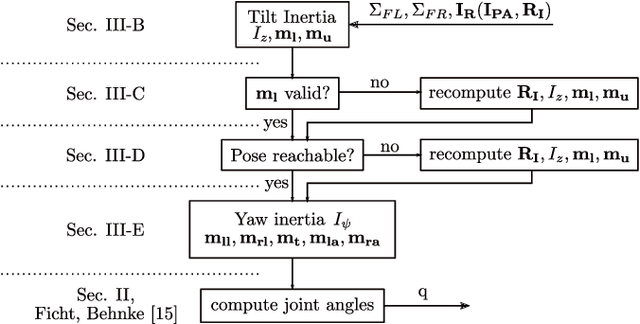
We introduce a new, analytical method for generating whole-body motions for humanoid robots, which approximate the desired Composite Rigid Body (CRB) inertia. Our approach uses a reduced five mass model, where four of the masses are attributed to the limbs and one is used for the trunk. This compact formulation allows for finding an analytical solution that combines the kinematics with mass distribution and inertial properties of a humanoid robot. The positioning of the masses in Cartesian space is then directly used to obtain joint angles with relations based on simple geometry. Motions are achieved through the time evolution of poses generated through the desired foot positioning and CRB inertia properties. As a result, we achieve short computation times in the order of tens of microseconds. This makes the method suited for applications with limited computation resources, or leaving them to be spent on higher-layer tasks such as model predictive control. The approach is evaluated by performing a dynamic kicking motion with an igus Humanoid Open Platform robot.
RoboCup 2019 AdultSize Winner NimbRo: Deep Learning Perception, In-Walk Kick, Push Recovery, and Team Play Capabilities
Dec 17, 2019
Individual and team capabilities are challenged every year by rule changes and the increasing performance of the soccer teams at RoboCup Humanoid League. For RoboCup 2019 in the AdultSize class, the number of players (2 vs. 2 games) and the field dimensions were increased, which demanded for team coordination and robust visual perception and localization modules. In this paper, we present the latest developments that lead team NimbRo to win the soccer tournament, drop-in games, technical challenges and the Best Humanoid Award of the RoboCup Humanoid League 2019 in Sydney. These developments include a deep learning vision system, in-walk kicks, step-based push-recovery, and team play strategies.