 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapless Humanoid Navigation Using Learned Latent Dynamics
Aug 09, 2021



In this paper, we propose a novel Deep Reinforcement Learning approach to address the mapless navigation problem, in which the locomotion actions of a humanoid robot are taken online based on the knowledge encoded in learned models. Planning happens by generating open-loop trajectories in a learned latent space that captures the dynamics of the environment. Our planner considers visual (RGB images) and non-visual observations (e.g., attitude estimations). This confers the agent upon awareness not only of the scenario, but also of its own state. In addition, we incorporate a termination likelihood predictor model as an auxiliary loss function of the control policy, which enables the agent to anticipate terminal states of success and failure. In this manner, the sample efficiency of the approach for episodic tasks is increased. Our model is evaluated on the NimbRo-OP2X humanoid robot that navigates in scenes avoiding collisions efficiently in simulation and with the real hardware.
NimbRo-OP2X: Affordable Adult-sized 3D-printed Open-Source Humanoid Robot for Research
Oct 19, 2020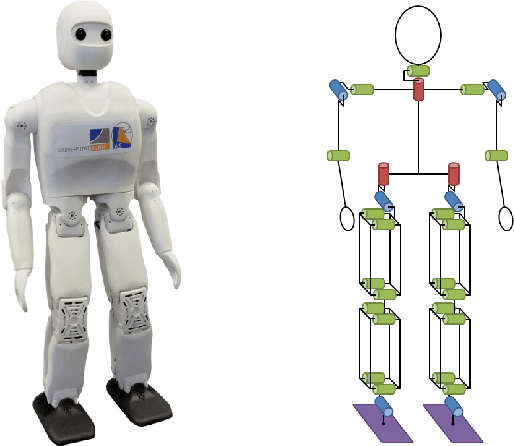
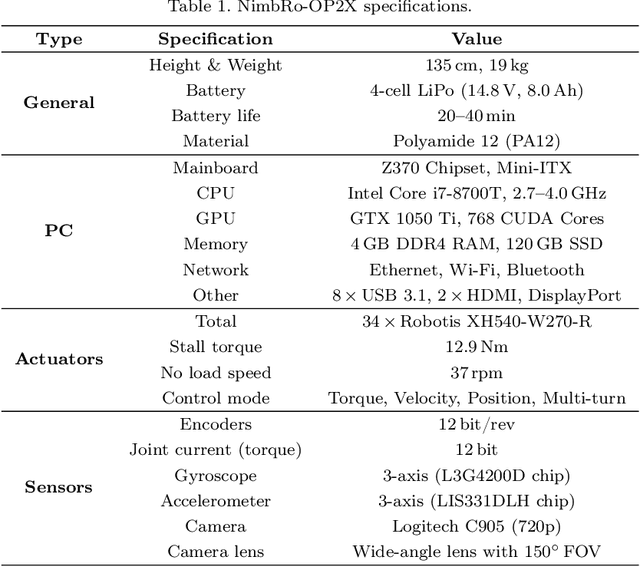
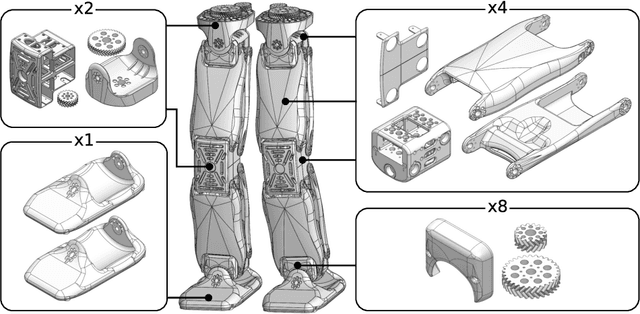
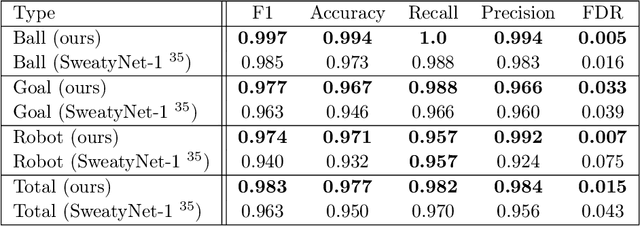
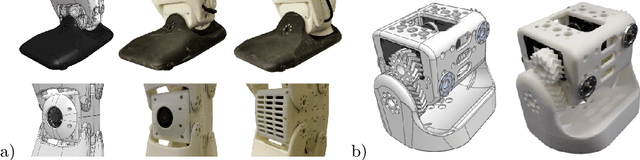
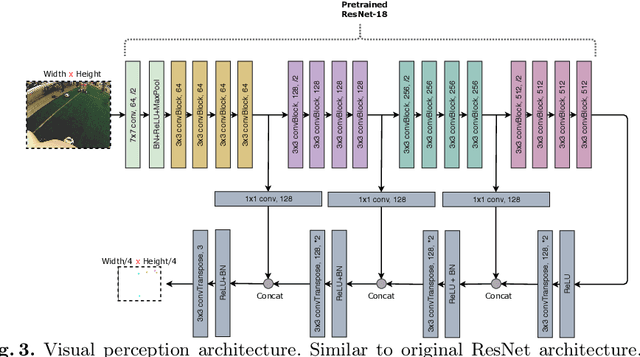
For several years, high development and production costs of humanoid robots restricted researchers interested in working in the field. To overcome this problem, several research groups have opted to work with simulated or smaller robots, whose acquisition costs are significantly lower. However, due to scale differences and imperfect simulation replicability, results may not be directly reproducible on real, adult-sized robots. In this paper, we present the NimbRo-OP2X, a capable and affordable adult-sized humanoid platform aiming to significantly lower the entry barrier for humanoid robot research. With a height of 135 cm and weight of only 19 kg, the robot can interact in an unmodified, human environment without special safety equipment. Modularity in hardware and software allow this platform enough flexibility to operate in different scenarios and applications with minimal effort. The robot is equipped with an on-board computer with GPU, which enables the implementation of state-of-the-art approaches for object detection and human perception demanded by areas such as manipulation and human-robot interaction. Finally, the capabilities of the NimbRo-OP2X, especially in terms of locomotion stability and visual perception, are evaluated. This includes the performance at RoboCup 2018, where NimbRo-OP2X won all possible awards in the AdultSize class.
RoboCup 2019 AdultSize Winner NimbRo: Deep Learning Perception, In-Walk Kick, Push Recovery, and Team Play Capabilities
Dec 17, 2019
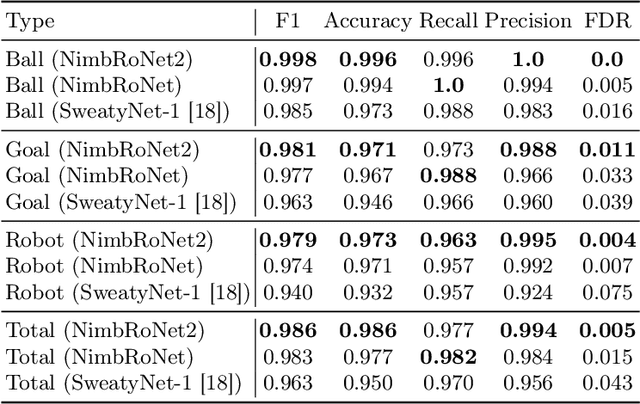
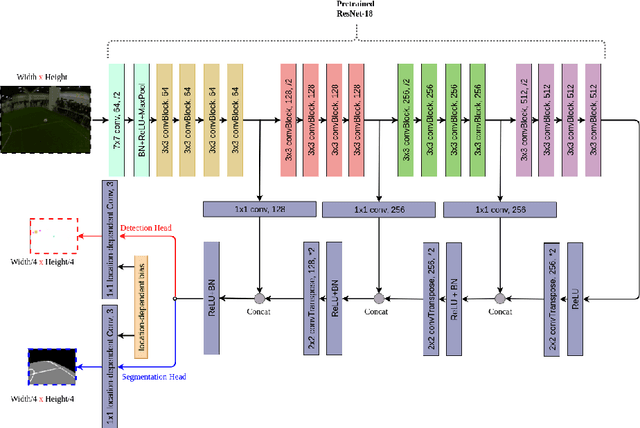
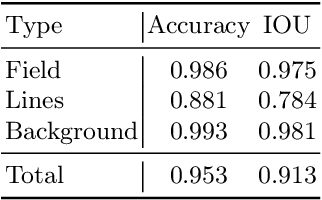
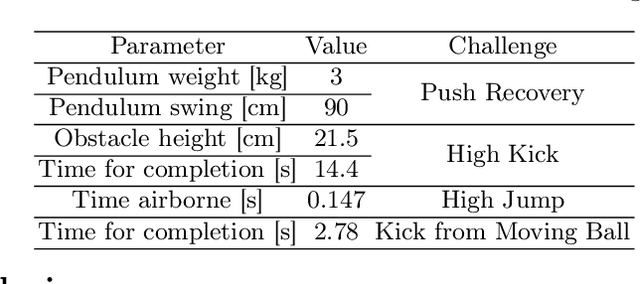
Individual and team capabilities are challenged every year by rule changes and the increasing performance of the soccer teams at RoboCup Humanoid League. For RoboCup 2019 in the AdultSize class, the number of players (2 vs. 2 games) and the field dimensions were increased, which demanded for team coordination and robust visual perception and localization modules. In this paper, we present the latest developments that lead team NimbRo to win the soccer tournament, drop-in games, technical challenges and the Best Humanoid Award of the RoboCup Humanoid League 2019 in Sydney. These developments include a deep learning vision system, in-walk kicks, step-based push-recovery, and team play strategies.
NimbRo Robots Winning RoboCup 2018 Humanoid AdultSize Soccer Competitions
Sep 05, 2019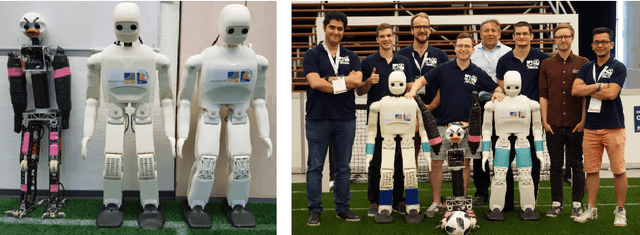
Over the past few years, the Humanoid League rules have changed towards more realistic and challenging game environments, which encourage teams to advance their robot soccer performances. In this paper, we present the software and hardware designs that led our team NimbRo to win the competitions in the AdultSize league -- including the soccer tournament, the drop-in games, and the technical challenges at RoboCup 2018 in Montreal. Altogether, this resulted in NimbRo winning the Best Humanoid Award. In particular, we describe our deep-learning approaches for visual perception and our new fully 3D printed robot NimbRo-OP2X.