 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboCup 2022 AdultSize Winner NimbRo: Upgraded Perception, Capture Steps Gait and Phase-based In-walk Kicks
Feb 07, 2023
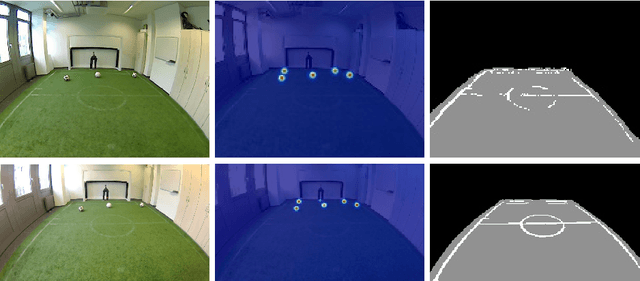

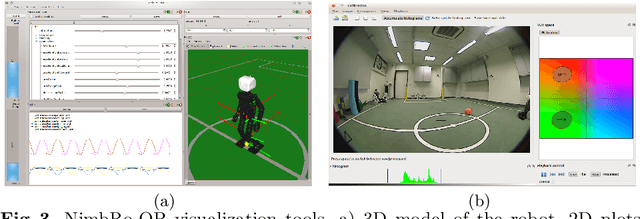
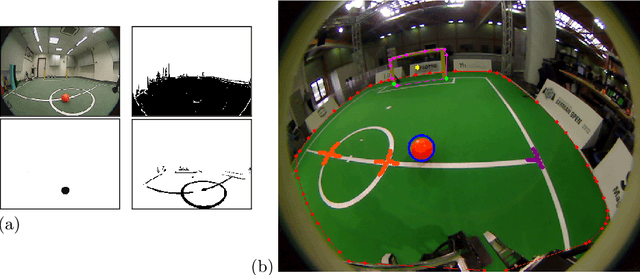
Beating the human world champions by 2050 is an ambitious goal of the Humanoid League that provides a strong incentive for RoboCup teams to further improve and develop their systems. In this paper, we present upgrades of our system which enabled our team NimbRo to win the Soccer Tournament, the Drop-in Games, and the Technical Challenges in the Humanoid AdultSize League of RoboCup 2022. Strong performance in these competitions resulted in the Best Humanoid award in the Humanoid League. The mentioned upgrades include: hardware upgrade of the vision module, balanced walking with Capture Steps, and the introduction of phase-based in-walk kicks.
Fast-Replanning Motion Control with Short-Term Aborting A*
Sep 16, 2021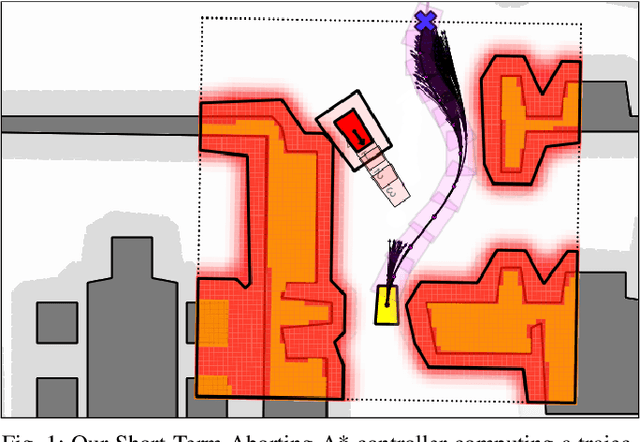
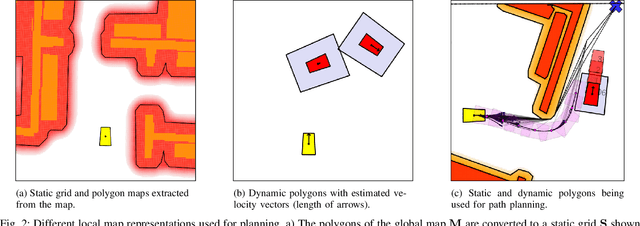
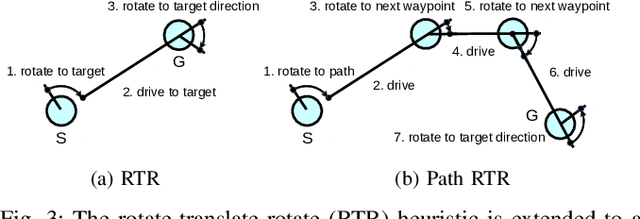
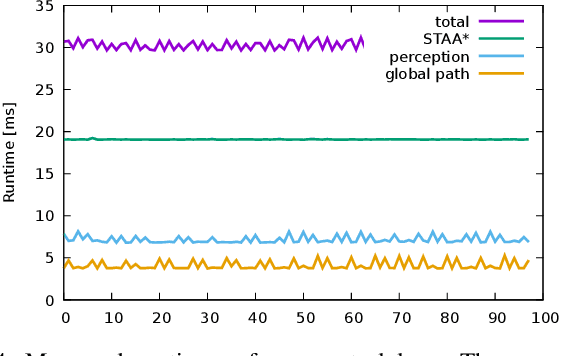
Autonomously driving vehicles must be able to navigate in dynamic and unpredictable environments in a collision-free manner. So far, this has only been partially achieved in driverless cars and warehouse installations where marked structures such as roads, lanes, and traffic signs simplify the motion planning and collision avoidance problem. We are presenting a new control framework for car-like vehicles that is suitable for virtually any environment. It is based on an unprecedentedly fast-paced A* implementation that allows the control cycle to run at a frequency of 33~Hz. Due to an efficient heuristic consisting of rotate-translate-rotate motions laid out along the shortest path to the target, our Short Term Aborting A* (STAA*) can be aborted early in order to maintain a high and steady control rate. This enables us to place our STAA* algorithm as a low-level replanning controller that is well suited for navigation and collision avoidance in dynamic environments. While our STAA* expands states along the shortest path, it takes care of collision checking with the environment including predicted future states of moving obstacles, and returns the best solution found when the computation time runs out. Despite the bounded computation time, our STAA* does not get trapped in environmental minima due to the following of the shortest path. In simulated experiments, we demonstrate that our control approach is superior to an improved version of the Dynamic Window Approach with predictive collision avoidance capabilities.
Capture Steps: Robust Walking for Humanoid Robots
Nov 05, 2020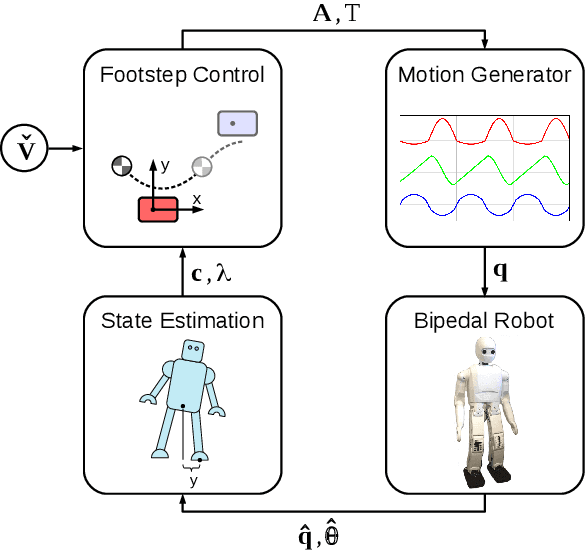
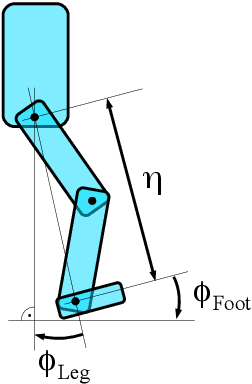
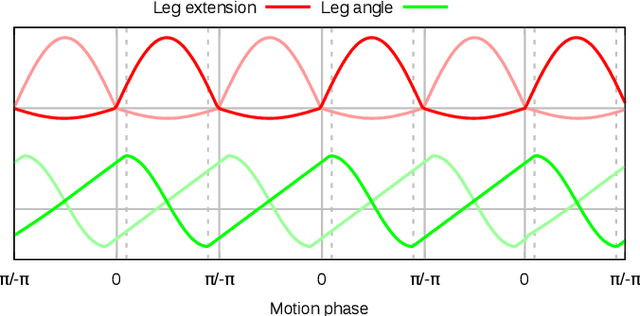
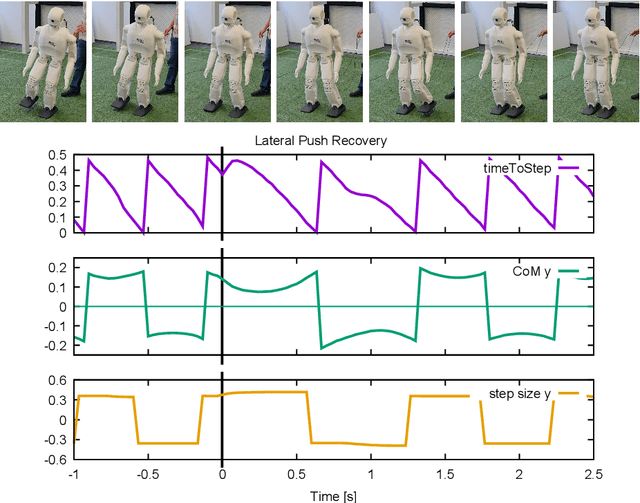
Stable bipedal walking is a key prerequisite for humanoid robots to reach their potential of being versatile helpers in our everyday environments. Bipedal walking is, however, a complex motion that requires the coordination of many degrees of freedom while it is also inherently unstable and sensitive to disturbances. The balance of a walking biped has to be constantly maintained. The most effective way of controlling balance are well timed and placed recovery steps -- capture steps -- that absorb the expense momentum gained from a push or a stumble. We present a bipedal gait generation framework that utilizes step timing and foot placement techniques in order to recover the balance of a biped even after strong disturbances. Our framework modifies the next footstep location instantly when responding to a disturbance and generates controllable omnidirectional walking using only very little sensing and computational power. We exploit the open-loop stability of a central pattern generated gait to fit a linear inverted pendulum model to the observed center of mass trajectory. Then, we use the fitted model to predict suitable footstep locations and timings in order to maintain balance while following a target walking velocity. Our experiments show qualitative and statistical evidence of one of the strongest push-recovery capabilities among humanoid robots to date.
Learning to Improve Capture Steps for Disturbance Rejection in Humanoid Soccer
Sep 28, 2018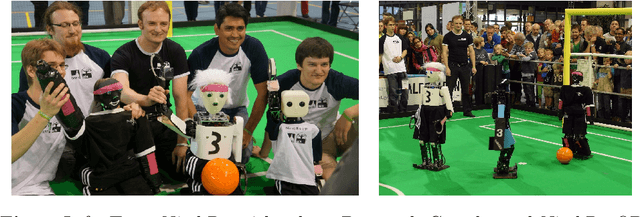
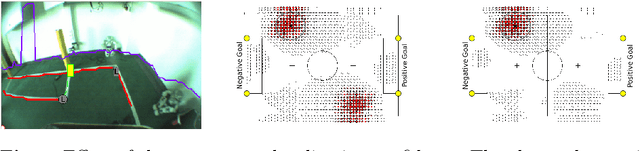
Over the past few years, soccer-playing humanoid robots have advanced significantly. Elementary skills, such as bipedal walking, visual perception, and collision avoidance have matured enough to allow for dynamic and exciting games. When two robots are fighting for the ball, they frequently push each other and balance recovery becomes crucial. In this paper, we report on insights we gained from systematic push experiments performed on a bipedal model and outline an online learning method we used to improve its push-recovery capabilities. In addition, we describe how the localization ambiguity introduced by the uniform goal color was resolved and report on the results of the RoboCup 2013 competition.
* RoboCup 2013: Robot World Cup XVII, Lecture Notes in Computer Science 8371, pp. 56-67, Springer, 2014
A ROS-based Software Framework for the NimbRo-OP Humanoid Open Platform
Sep 28, 2018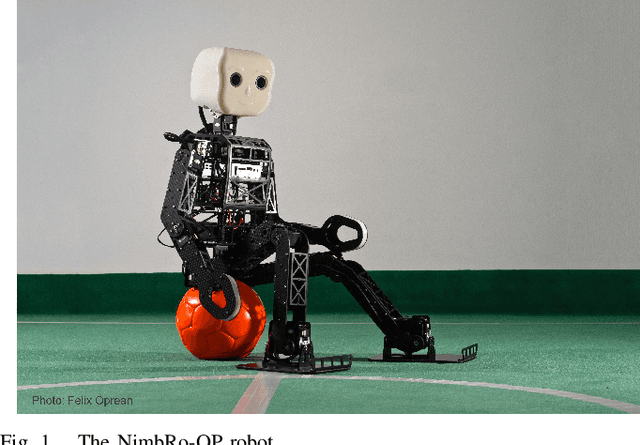
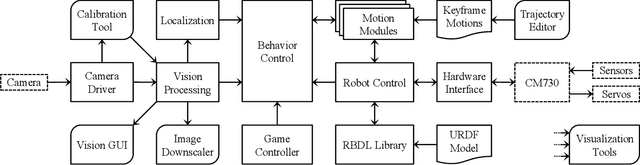
Over the past few years, a number of successful humanoid platforms have been developed, including the Nao and the DARwIn-OP, both of which are used by many research groups for the investigation of bipedal walking, full-body motions, and human-robot interaction. The NimbRo-OP is an open humanoid platform under development by team NimbRo of the University of Bonn. Significantly larger than the two aforementioned humanoids, this platform has the potential to interact with a more human-scale environment. This paper describes a software framework for the NimbRo-OP that is based on the Robot Operating System (ROS) middleware. The software provides functionality for hardware abstraction, visual perception, and behavior generation, and has been used to implement basic soccer skills. These were demonstrated at RoboCup 2013, as part of the winning team of the Humanoid League competition.
* Proceedings of 8th Workshop on Humanoid Soccer Robots, International Conference on Humanoid Robots (Humanoids), Atlanta, USA, 2013
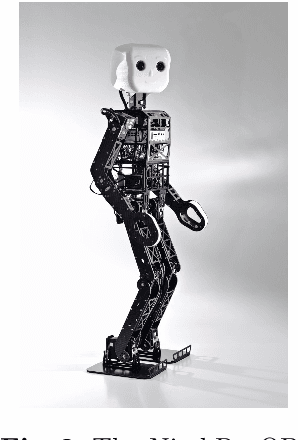
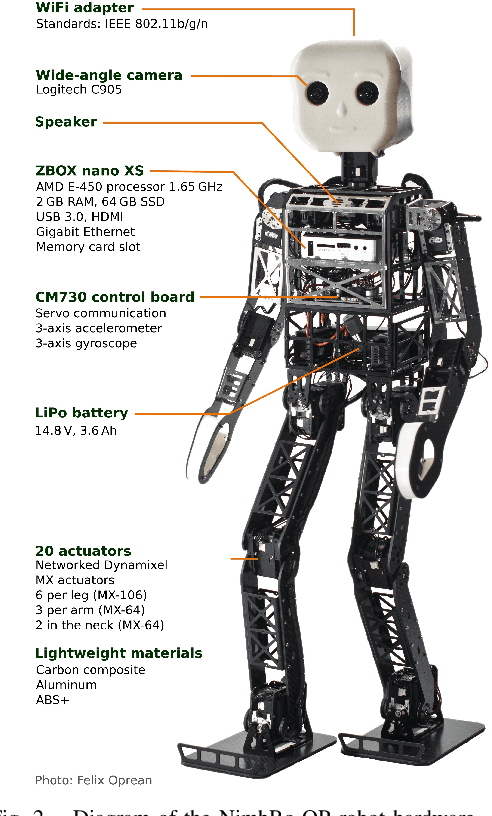
Humanoid TeenSize Open Platform NimbRo-OP
Sep 28, 2018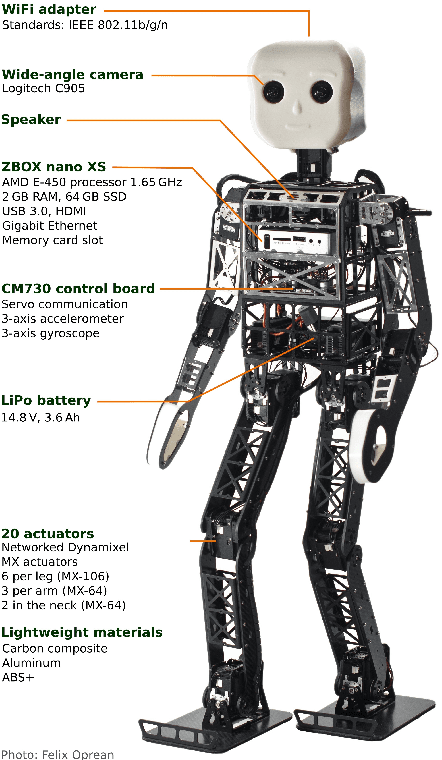
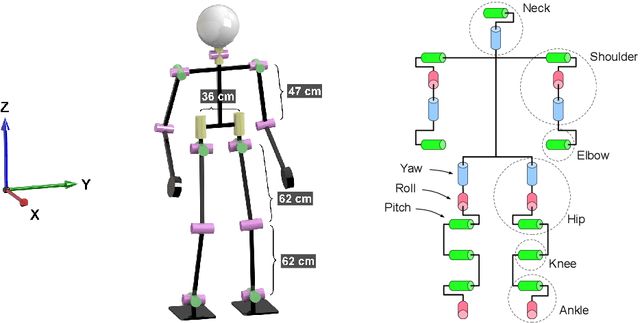
In recent years, the introduction of affordable platforms in the KidSize class of the Humanoid League has had a positive impact on the performance of soccer robots. The lack of readily available larger robots, however, severely affects the number of participants in Teen- and AdultSize and consequently the progress of research that focuses on the challenges arising with robots of larger weight and size. This paper presents the first hardware release of a low cost Humanoid TeenSize open platform for research, the first software release, and the current state of ROS-based software development. The NimbRo-OP robot was designed to be easily manufactured, assembled, repaired, and modified. It is equipped with a wide-angle camera, ample computing power, and enough torque to enable full-body motions, such as dynamic bipedal locomotion, kicking, and getting up.
* Proceedings of 17th RoboCup International Symposium, Eindhoven, Netherlands, 2013