 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Improve Capture Steps for Disturbance Rejection in Humanoid Soccer
Sep 28, 2018
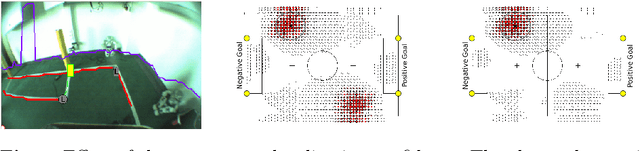
Over the past few years, soccer-playing humanoid robots have advanced significantly. Elementary skills, such as bipedal walking, visual perception, and collision avoidance have matured enough to allow for dynamic and exciting games. When two robots are fighting for the ball, they frequently push each other and balance recovery becomes crucial. In this paper, we report on insights we gained from systematic push experiments performed on a bipedal model and outline an online learning method we used to improve its push-recovery capabilities. In addition, we describe how the localization ambiguity introduced by the uniform goal color was resolved and report on the results of the RoboCup 2013 competition.
* RoboCup 2013: Robot World Cup XVII, Lecture Notes in Computer Science 8371, pp. 56-67, Springer, 2014
A ROS-based Software Framework for the NimbRo-OP Humanoid Open Platform
Sep 28, 2018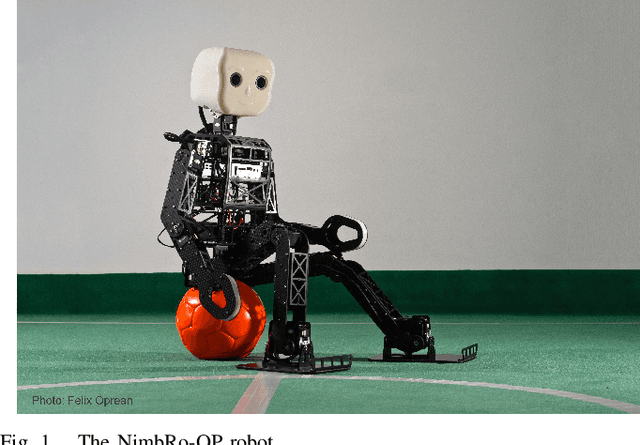
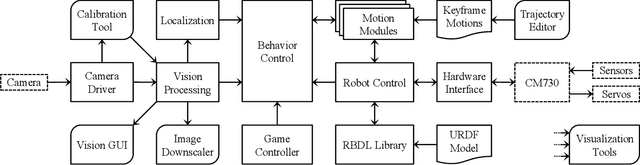
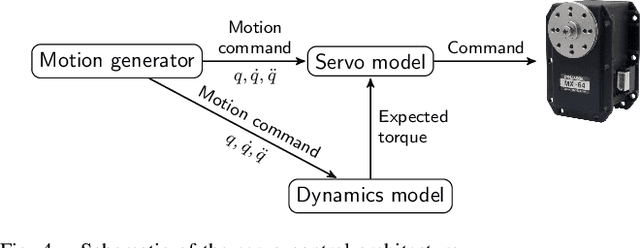
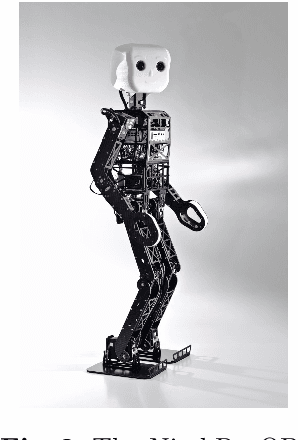
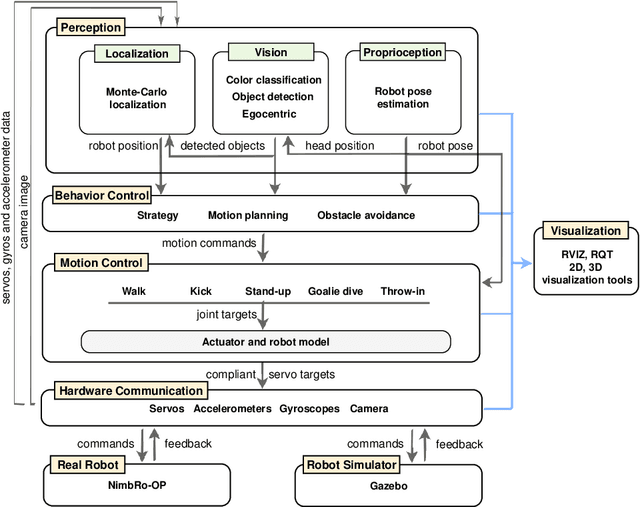
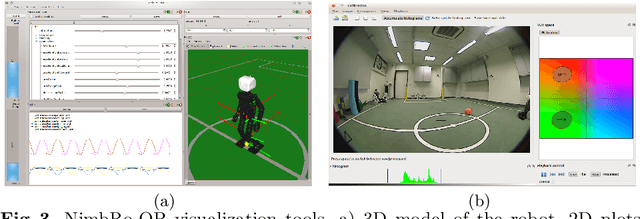
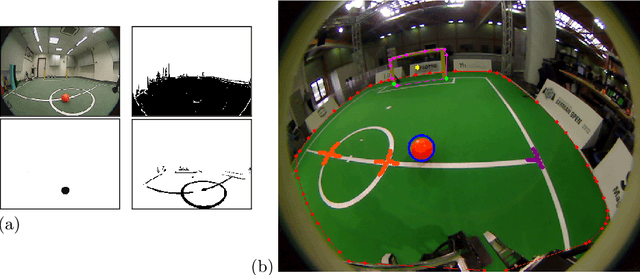
Over the past few years, a number of successful humanoid platforms have been developed, including the Nao and the DARwIn-OP, both of which are used by many research groups for the investigation of bipedal walking, full-body motions, and human-robot interaction. The NimbRo-OP is an open humanoid platform under development by team NimbRo of the University of Bonn. Significantly larger than the two aforementioned humanoids, this platform has the potential to interact with a more human-scale environment. This paper describes a software framework for the NimbRo-OP that is based on the Robot Operating System (ROS) middleware. The software provides functionality for hardware abstraction, visual perception, and behavior generation, and has been used to implement basic soccer skills. These were demonstrated at RoboCup 2013, as part of the winning team of the Humanoid League competition.
* Proceedings of 8th Workshop on Humanoid Soccer Robots, International Conference on Humanoid Robots (Humanoids), Atlanta, USA, 2013
Humanoid TeenSize Open Platform NimbRo-OP
Sep 28, 2018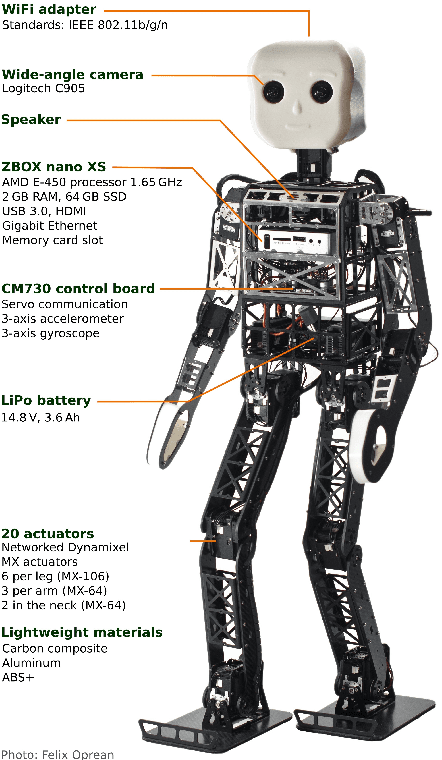
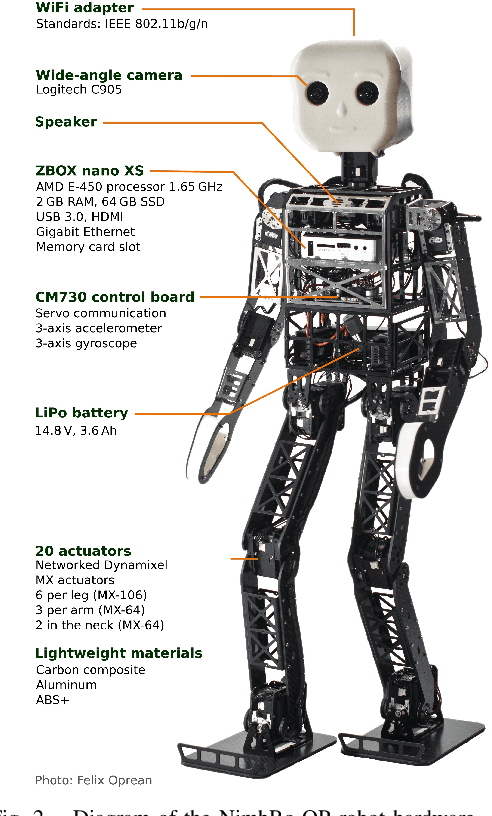
In recent years, the introduction of affordable platforms in the KidSize class of the Humanoid League has had a positive impact on the performance of soccer robots. The lack of readily available larger robots, however, severely affects the number of participants in Teen- and AdultSize and consequently the progress of research that focuses on the challenges arising with robots of larger weight and size. This paper presents the first hardware release of a low cost Humanoid TeenSize open platform for research, the first software release, and the current state of ROS-based software development. The NimbRo-OP robot was designed to be easily manufactured, assembled, repaired, and modified. It is equipped with a wide-angle camera, ample computing power, and enough torque to enable full-body motions, such as dynamic bipedal locomotion, kicking, and getting up.
* Proceedings of 17th RoboCup International Symposium, Eindhoven, Netherlands, 2013