Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Improve Capture Steps for Disturbance Rejection in Humanoid Soccer
Paper and Code
Sep 28, 2018
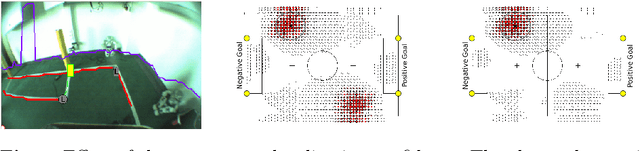
Over the past few years, soccer-playing humanoid robots have advanced significantly. Elementary skills, such as bipedal walking, visual perception, and collision avoidance have matured enough to allow for dynamic and exciting games. When two robots are fighting for the ball, they frequently push each other and balance recovery becomes crucial. In this paper, we report on insights we gained from systematic push experiments performed on a bipedal model and outline an online learning method we used to improve its push-recovery capabilities. In addition, we describe how the localization ambiguity introduced by the uniform goal color was resolved and report on the results of the RoboCup 2013 competition.
* RoboCup 2013: Robot World Cup XVII, Lecture Notes in Computer
Science 8371, pp. 56-67, Springer, 2014 * RoboCup 2013: Robot World Cup XVII, Lecture Notes in Computer Science
8371, pp. 56-67, Springer, 2014
View paper on