Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrown-up NimbRo Robots Winning RoboCup 2017 Humanoid AdultSize Soccer Competitions
Paper and Code
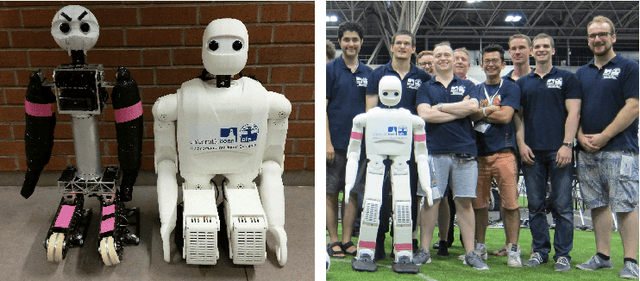

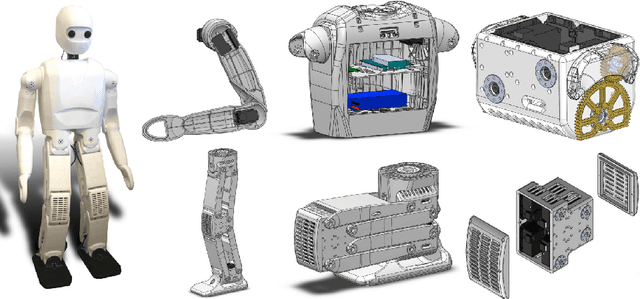

The ongoing evolution of the RoboCup Humanoid League led in 2017 to the introduction of one vs. one soccer games for the AdultSize robots, which motived our team NimbRo to enter this category. In this paper, we present the mechatronic design of our upgraded robot Copedo and the newly developed NimbRo-OP2, which received the RoboCup Design Award. We also describe improved approaches to visual perception of the game situation, including compassless localization on a soccer field with symmetric appearance, and the generation of soccer behaviors. At RoboCup 2017 in Nagoya, our robots played very well, winning the AdultSize soccer tournament with high scores. Our robots also won the technical challenges and we present the developed solutions.
* Accepted for RoboCup 2017: Robot World Cup XXI, LNCS, Springer, to
appear 2018
View paper on