 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNimbRo-OP2X: Adult-sized Open-source 3D Printed Humanoid Robot
Paper and Code
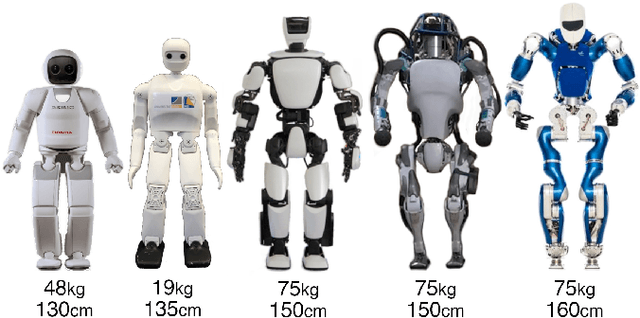
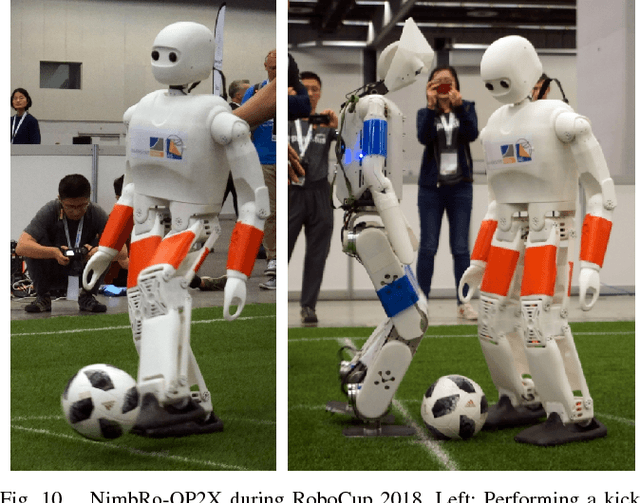
Humanoid robotics research depends on capable robot platforms, but recently developed advanced platforms are often not available to other research groups, expensive, dangerous to operate, or closed-source. The lack of available platforms forces researchers to work with smaller robots, which have less strict dynamic constraints or with simulations, which lack many real-world effects. We developed NimbRo-OP2X to address this need. At a height of 135 cm our robot is large enough to interact in a human environment. Its low weight of only 19 kg makes the operation of the robot safe and easy, as no special operational equipment is necessary. Our robot is equipped with a fast onboard computer and a GPU to accelerate parallel computations. We extend our already open-source software by a deep-learning based vision system and gait parameter optimisation. The NimbRo-OP2X was evaluated during RoboCup 2018 in Montr\'eal, Canada, where it won all possible awards in the Humanoid AdultSize class.