 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentic-J: An AI Agent for Biological Microscopy Image Analysis
Jun 01, 2026Biological image analysis increasingly demands integration across heterogeneous tools, programming environments, and domain knowledge that few researchers can command simultaneously. We present Agentic-J, a containerised, multi-agent AI assistant, primarily for ImageJ/Fiji that enables biologists to specify analysis tasks in natural language, from nuclei segmentation and cell tracking to multi-condition quantification. The agent generates executable scripts organised into a documented project structure, so every analysis decision is traceable and the workflow can be reproduced or shared. The specialised sub-agents handle plugin management, code generation, debugging, quality assurance, and statistical reporting. In this paper we introduce the system's design, demonstrate real biological microscopy image analysis workflows, and detailed the technical implementation.
FlowRoI A Fast Optical Flow Driven Region of Interest Extraction Framework for High-Throughput Image Compression in Immune Cell Migration Analysis
Nov 18, 2025Autonomous migration is essential for the function of immune cells such as neutrophils and plays a pivotal role in diverse diseases. Recently, we introduced ComplexEye, a multi-lens array microscope comprising 16 independent aberration-corrected glass lenses arranged at the pitch of a 96-well plate, capable of capturing high-resolution movies of migrating cells. This architecture enables high-throughput live-cell video microscopy for migration analysis, supporting routine quantification of autonomous motility with strong potential for clinical translation. However, ComplexEye and similar high-throughput imaging platforms generate data at an exponential rate, imposing substantial burdens on storage and transmission. To address this challenge, we present FlowRoI, a fast optical-flow-based region of interest (RoI) extraction framework designed for high-throughput image compression in immune cell migration studies. FlowRoI estimates optical flow between consecutive frames and derives RoI masks that reliably cover nearly all migrating cells. The raw image and its corresponding RoI mask are then jointly encoded using JPEG2000 to enable RoI-aware compression. FlowRoI operates with high computational efficiency, achieving runtimes comparable to standard JPEG2000 and reaching an average throughput of about 30 frames per second on a modern laptop equipped with an Intel i7-1255U CPU. In terms of image quality, FlowRoI yields higher peak signal-to-noise ratio (PSNR) in cellular regions and achieves 2.0-2.2x higher compression rates at matched PSNR compared to standard JPEG2000.
Adaptive Kinematic Modeling for Improved Hand Posture Estimates Using a Haptic Glove
Nov 10, 2024



Most commercially available haptic gloves compromise the accuracy of hand-posture measurements in favor of a simpler design with fewer sensors. While inaccurate posture data is often sufficient for the task at hand in biomedical settings such as VR-therapy-aided rehabilitation, measurements should be as precise as possible to digitally recreate hand postures as accurately as possible. With these applications in mind, we have added extra sensors to the commercially available Dexmo haptic glove by Dexta Robotics and applied kinematic models of the haptic glove and the user's hand to improve the accuracy of hand-posture measurements. In this work, we describe the augmentations and the kinematic modeling approach. Additionally, we present and discuss an evaluation of hand posture measurements as a proof of concept.
Implicit Neural Image Field for Biological Microscopy Image Compression
May 29, 2024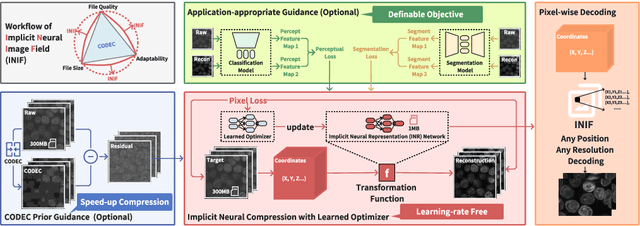
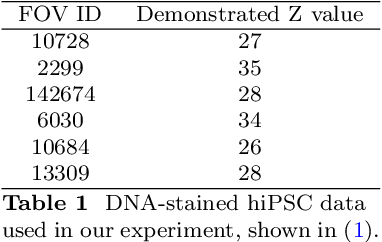
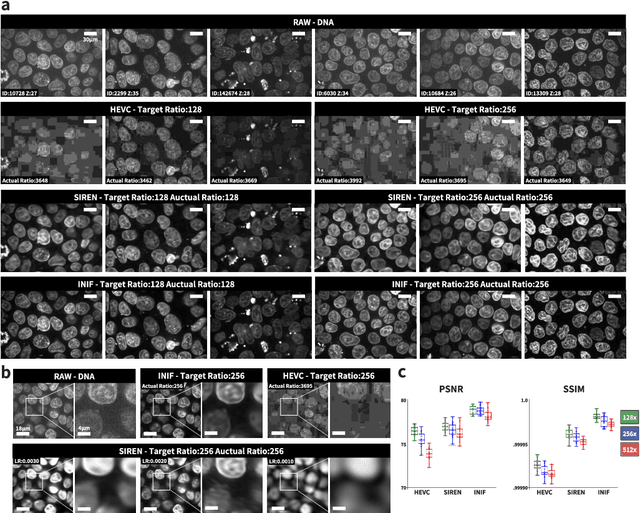
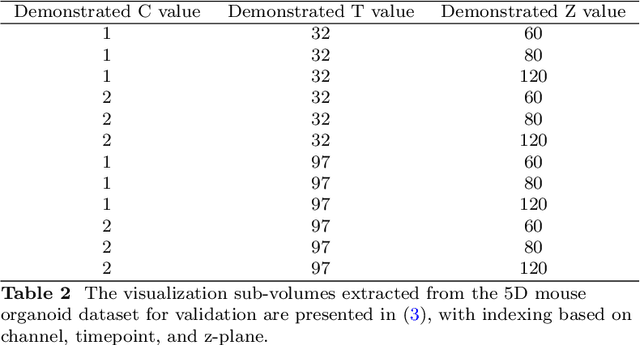
The rapid pace of innovation in biological microscopy imaging has led to large images, putting pressure on data storage and impeding efficient sharing, management, and visualization. This necessitates the development of efficient compression solutions. Traditional CODEC methods struggle to adapt to the diverse bioimaging data and often suffer from sub-optimal compression. In this study, we propose an adaptive compression workflow based on Implicit Neural Representation (INR). This approach permits application-specific compression objectives, capable of compressing images of any shape and arbitrary pixel-wise decompression. We demonstrated on a wide range of microscopy images from real applications that our workflow not only achieved high, controllable compression ratios (e.g., 512x) but also preserved detailed information critical for downstream analysis.
MedShapeNet -- A Large-Scale Dataset of 3D Medical Shapes for Computer Vision
Sep 12, 2023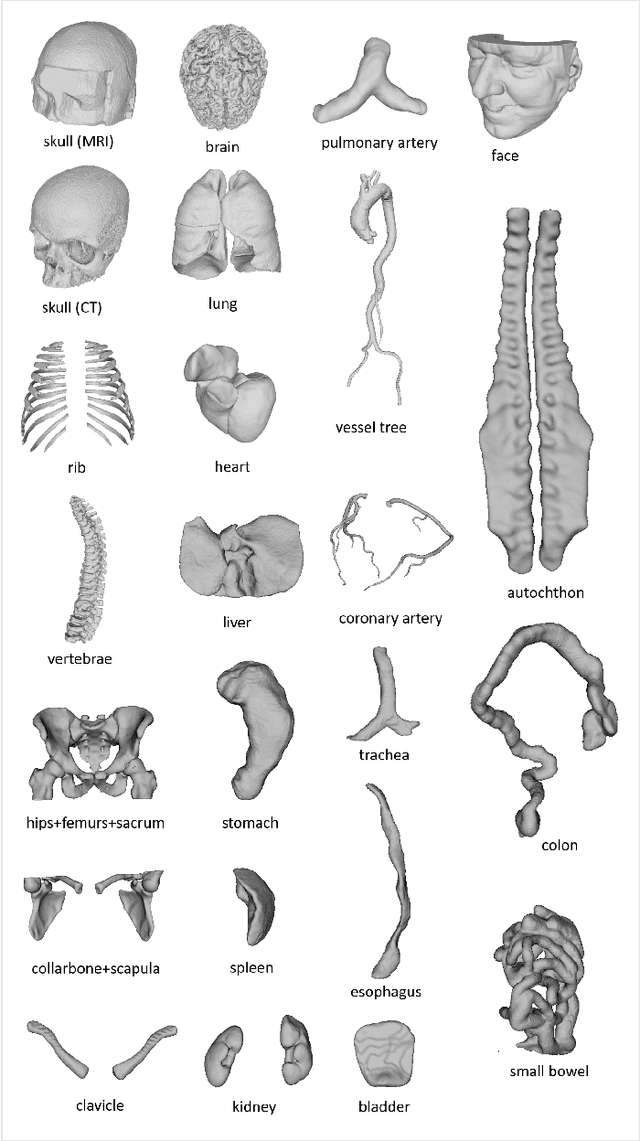
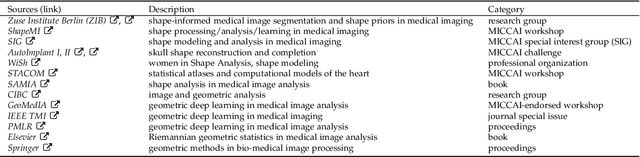
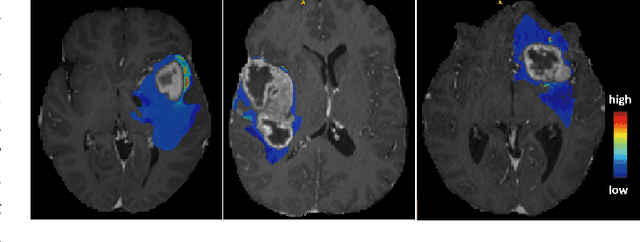
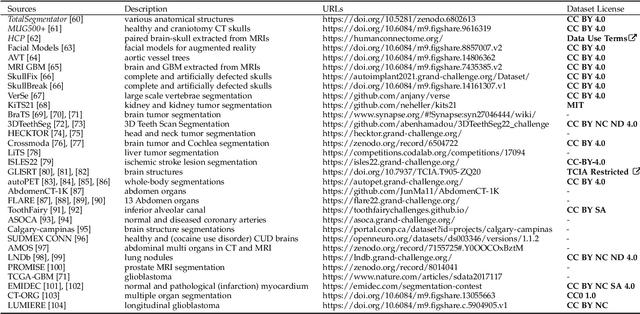
We present MedShapeNet, a large collection of anatomical shapes (e.g., bones, organs, vessels) and 3D surgical instrument models. Prior to the deep learning era, the broad application of statistical shape models (SSMs) in medical image analysis is evidence that shapes have been commonly used to describe medical data. Nowadays, however, state-of-the-art (SOTA) deep learning algorithms in medical imaging are predominantly voxel-based. In computer vision, on the contrary, shapes (including, voxel occupancy grids, meshes, point clouds and implicit surface models) are preferred data representations in 3D, as seen from the numerous shape-related publications in premier vision conferences, such as the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), as well as the increasing popularity of ShapeNet (about 51,300 models) and Princeton ModelNet (127,915 models) in computer vision research. MedShapeNet is created as an alternative to these commonly used shape benchmarks to facilitate the translation of data-driven vision algorithms to medical applications, and it extends the opportunities to adapt SOTA vision algorithms to solve critical medical problems. Besides, the majority of the medical shapes in MedShapeNet are modeled directly on the imaging data of real patients, and therefore it complements well existing shape benchmarks comprising of computer-aided design (CAD) models. MedShapeNet currently includes more than 100,000 medical shapes, and provides annotations in the form of paired data. It is therefore also a freely available repository of 3D models for extended reality (virtual reality - VR, augmented reality - AR, mixed reality - MR) and medical 3D printing. This white paper describes in detail the motivations behind MedShapeNet, the shape acquisition procedures, the use cases, as well as the usage of the online shape search portal: https://medshapenet.ikim.nrw/