 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePseudo-Simulation for Autonomous Driving
Jun 04, 2025Existing evaluation paradigms for Autonomous Vehicles (AVs) face critical limitations. Real-world evaluation is often challenging due to safety concerns and a lack of reproducibility, whereas closed-loop simulation can face insufficient realism or high computational costs. Open-loop evaluation, while being efficient and data-driven, relies on metrics that generally overlook compounding errors. In this paper, we propose pseudo-simulation, a novel paradigm that addresses these limitations. Pseudo-simulation operates on real datasets, similar to open-loop evaluation, but augments them with synthetic observations generated prior to evaluation using 3D Gaussian Splatting. Our key idea is to approximate potential future states the AV might encounter by generating a diverse set of observations that vary in position, heading, and speed. Our method then assigns a higher importance to synthetic observations that best match the AV's likely behavior using a novel proximity-based weighting scheme. This enables evaluating error recovery and the mitigation of causal confusion, as in closed-loop benchmarks, without requiring sequential interactive simulation. We show that pseudo-simulation is better correlated with closed-loop simulations (R^2=0.8) than the best existing open-loop approach (R^2=0.7). We also establish a public leaderboard for the community to benchmark new methodologies with pseudo-simulation. Our code is available at https://github.com/autonomousvision/navsim.
Learning Through Retrospection: Improving Trajectory Prediction for Automated Driving with Error Feedback
Apr 18, 2025
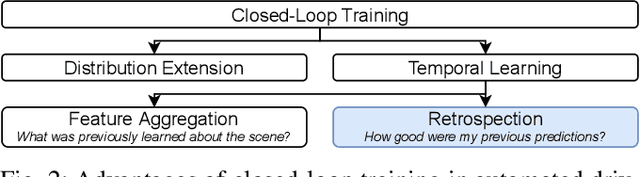

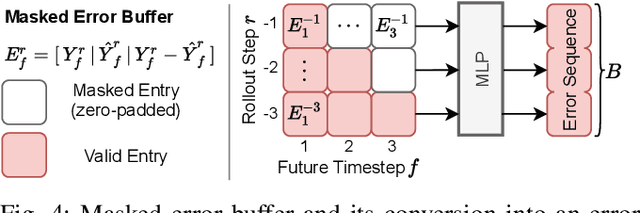
In automated driving, predicting trajectories of surrounding vehicles supports reasoning about scene dynamics and enables safe planning for the ego vehicle. However, existing models handle predictions as an instantaneous task of forecasting future trajectories based on observed information. As time proceeds, the next prediction is made independently of the previous one, which means that the model cannot correct its errors during inference and will repeat them. To alleviate this problem and better leverage temporal data, we propose a novel retrospection technique. Through training on closed-loop rollouts the model learns to use aggregated feedback. Given new observations it reflects on previous predictions and analyzes its errors to improve the quality of subsequent predictions. Thus, the model can learn to correct systematic errors during inference. Comprehensive experiments on nuScenes and Argoverse demonstrate a considerable decrease in minimum Average Displacement Error of up to 31.9% compared to the state-of-the-art baseline without retrospection. We further showcase the robustness of our technique by demonstrating a better handling of out-of-distribution scenarios with undetected road-users.
NAVSIM: Data-Driven Non-Reactive Autonomous Vehicle Simulation and Benchmarking
Jun 21, 2024



Benchmarking vision-based driving policies is challenging. On one hand, open-loop evaluation with real data is easy, but these results do not reflect closed-loop performance. On the other, closed-loop evaluation is possible in simulation, but is hard to scale due to its significant computational demands. Further, the simulators available today exhibit a large domain gap to real data. This has resulted in an inability to draw clear conclusions from the rapidly growing body of research on end-to-end autonomous driving. In this paper, we present NAVSIM, a middle ground between these evaluation paradigms, where we use large datasets in combination with a non-reactive simulator to enable large-scale real-world benchmarking. Specifically, we gather simulation-based metrics, such as progress and time to collision, by unrolling bird's eye view abstractions of the test scenes for a short simulation horizon. Our simulation is non-reactive, i.e., the evaluated policy and environment do not influence each other. As we demonstrate empirically, this decoupling allows open-loop metric computation while being better aligned with closed-loop evaluations than traditional displacement errors. NAVSIM enabled a new competition held at CVPR 2024, where 143 teams submitted 463 entries, resulting in several new insights. On a large set of challenging scenarios, we observe that simple methods with moderate compute requirements such as TransFuser can match recent large-scale end-to-end driving architectures such as UniAD. Our modular framework can potentially be extended with new datasets, data curation strategies, and metrics, and will be continually maintained to host future challenges. Our code is available at https://github.com/autonomousvision/navsim.
Can Vehicle Motion Planning Generalize to Realistic Long-tail Scenarios?
Apr 11, 2024



Real-world autonomous driving systems must make safe decisions in the face of rare and diverse traffic scenarios. Current state-of-the-art planners are mostly evaluated on real-world datasets like nuScenes (open-loop) or nuPlan (closed-loop). In particular, nuPlan seems to be an expressive evaluation method since it is based on real-world data and closed-loop, yet it mostly covers basic driving scenarios. This makes it difficult to judge a planner's capabilities to generalize to rarely-seen situations. Therefore, we propose a novel closed-loop benchmark interPlan containing several edge cases and challenging driving scenarios. We assess existing state-of-the-art planners on our benchmark and show that neither rule-based nor learning-based planners can safely navigate the interPlan scenarios. A recently evolving direction is the usage of foundation models like large language models (LLM) to handle generalization. We evaluate an LLM-only planner and introduce a novel hybrid planner that combines an LLM-based behavior planner with a rule-based motion planner that achieves state-of-the-art performance on our benchmark.
Conditional Unscented Autoencoders for Trajectory Prediction
Oct 30, 2023



The \ac{CVAE} is one of the most widely-used models in trajectory prediction for \ac{AD}. It captures the interplay between a driving context and its ground-truth future into a probabilistic latent space and uses it to produce predictions. In this paper, we challenge key components of the CVAE. We leverage recent advances in the space of the VAE, the foundation of the CVAE, which show that a simple change in the sampling procedure can greatly benefit performance. We find that unscented sampling, which draws samples from any learned distribution in a deterministic manner, can naturally be better suited to trajectory prediction than potentially dangerous random sampling. We go further and offer additional improvements, including a more structured mixture latent space, as well as a novel, potentially more expressive way to do inference with CVAEs. We show wide applicability of our models by evaluating them on the INTERACTION prediction dataset, outperforming the state of the art, as well as at the task of image modeling on the CelebA dataset, outperforming the baseline vanilla CVAE. Code is available at https://github.com/boschresearch/cuae-prediction.
Rethinking Integration of Prediction and Planning in Deep Learning-Based Automated Driving Systems: A Review
Aug 10, 2023
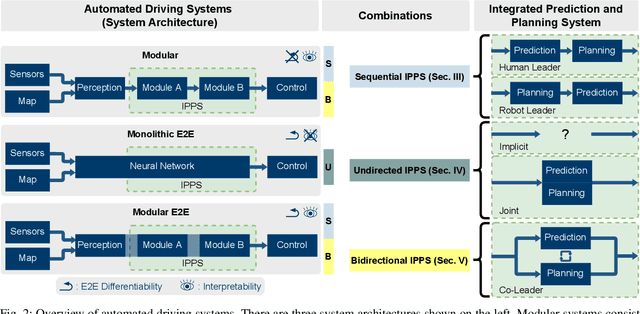
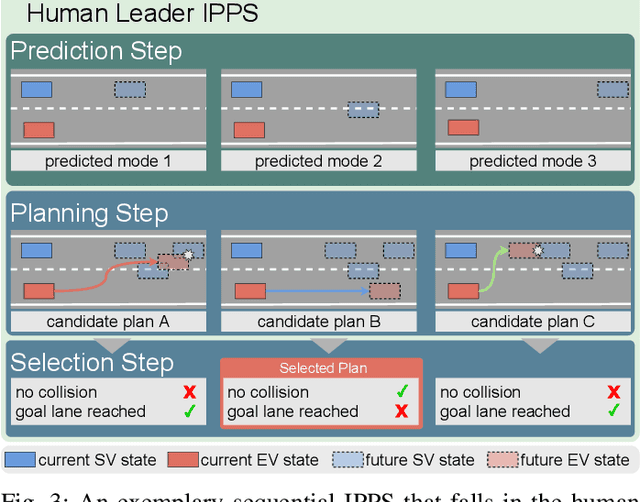
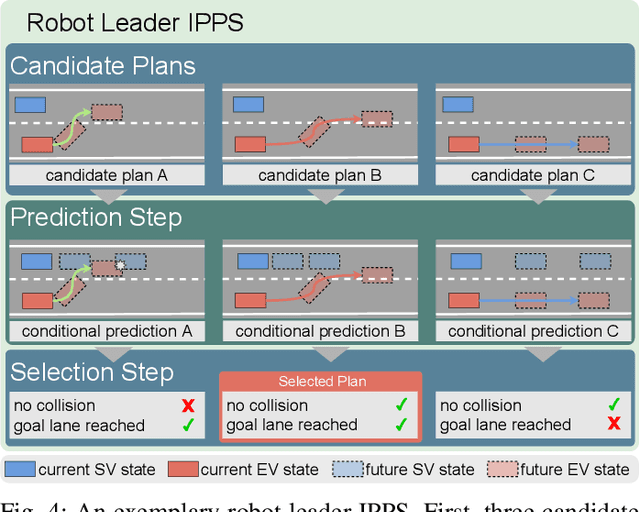
Automated driving has the potential to revolutionize personal, public, and freight mobility. Besides the enormous challenge of perception, i.e. accurately perceiving the environment using available sensor data, automated driving comprises planning a safe, comfortable, and efficient motion trajectory. To promote safety and progress, many works rely on modules that predict the future motion of surrounding traffic. Modular automated driving systems commonly handle prediction and planning as sequential separate tasks. While this accounts for the influence of surrounding traffic on the ego-vehicle, it fails to anticipate the reactions of traffic participants to the ego-vehicle's behavior. Recent works suggest that integrating prediction and planning in an interdependent joint step is necessary to achieve safe, efficient, and comfortable driving. While various models implement such integrated systems, a comprehensive overview and theoretical understanding of different principles are lacking. We systematically review state-of-the-art deep learning-based prediction, planning, and integrated prediction and planning models. Different facets of the integration ranging from model architecture and model design to behavioral aspects are considered and related to each other. Moreover, we discuss the implications, strengths, and limitations of different integration methods. By pointing out research gaps, describing relevant future challenges, and highlighting trends in the research field, we identify promising directions for future research.
Parting with Misconceptions about Learning-based Vehicle Motion Planning
Jun 13, 2023The release of nuPlan marks a new era in vehicle motion planning research, offering the first large-scale real-world dataset and evaluation schemes requiring both precise short-term planning and long-horizon ego-forecasting. Existing systems struggle to simultaneously meet both requirements. Indeed, we find that these tasks are fundamentally misaligned and should be addressed independently. We further assess the current state of closed-loop planning in the field, revealing the limitations of learning-based methods in complex real-world scenarios and the value of simple rule-based priors such as centerline selection through lane graph search algorithms. More surprisingly, for the open-loop sub-task, we observe that the best results are achieved when using only this centerline as scene context (\ie, ignoring all information regarding the map and other agents). Combining these insights, we propose an extremely simple and efficient planner which outperforms an extensive set of competitors, winning the nuPlan planning challenge 2023.
Stay on Track: A Frenet Wrapper to Overcome Off-road Trajectories in Vehicle Motion Prediction
Jun 01, 2023Predicting the future motion of observed vehicles is a crucial enabler for safe autonomous driving. The field of motion prediction has seen large progress recently with State-of-the-Art (SotA) models achieving impressive results on large-scale public benchmarks. However, recent work revealed that learning-based methods are prone to predict off-road trajectories in challenging scenarios. These can be created by perturbing existing scenarios with additional turns in front of the target vehicle while the motion history is left unchanged. We argue that this indicates that SotA models do not consider the map information sufficiently and demonstrate how this can be solved, by representing model inputs and outputs in a Frenet frame defined by lane centreline sequences. To this end, we present a general wrapper that leverages a Frenet representation of the scene and that can be applied to SotA models without changing their architecture. We demonstrate the effectiveness of this approach in a comprehensive benchmark using two SotA motion prediction models. Our experiments show that this reduces the off-road rate on challenging scenarios by more than 90\%, without sacrificing average performance.
From Prediction to Planning With Goal Conditioned Lane Graph Traversals
Feb 15, 2023



The field of motion prediction for automated driving has seen tremendous progress recently, bearing ever-more mighty neural network architectures. Leveraging these powerful models bears great potential for the closely related planning task. In this letter we propose a novel goal-conditioning method and show its potential to transform a state-of-the-art prediction model into a goal-directed planner. Our key insight is that conditioning prediction on a navigation goal at the behaviour level outperforms other widely adopted methods, with the additional benefit of increased model interpretability. We train our model on a large open-source dataset and show promising performance in a comprehensive benchmark.