 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Integration of Prediction and Planning in Deep Learning-Based Automated Driving Systems: A Review
Paper and Code
Aug 10, 2023
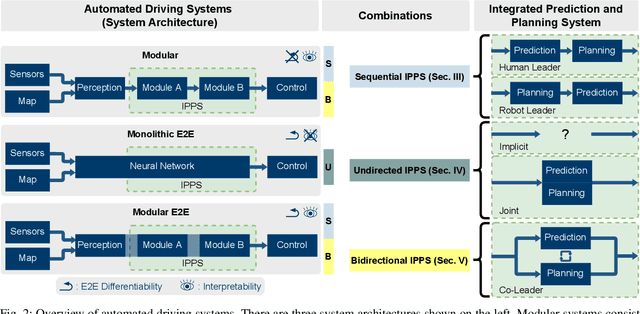
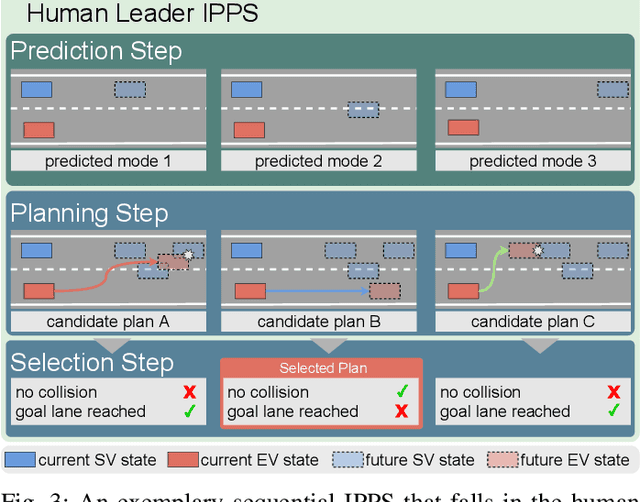
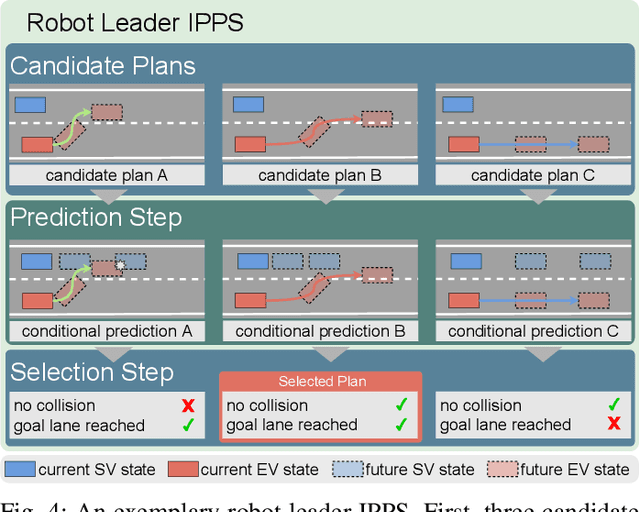
Automated driving has the potential to revolutionize personal, public, and freight mobility. Besides the enormous challenge of perception, i.e. accurately perceiving the environment using available sensor data, automated driving comprises planning a safe, comfortable, and efficient motion trajectory. To promote safety and progress, many works rely on modules that predict the future motion of surrounding traffic. Modular automated driving systems commonly handle prediction and planning as sequential separate tasks. While this accounts for the influence of surrounding traffic on the ego-vehicle, it fails to anticipate the reactions of traffic participants to the ego-vehicle's behavior. Recent works suggest that integrating prediction and planning in an interdependent joint step is necessary to achieve safe, efficient, and comfortable driving. While various models implement such integrated systems, a comprehensive overview and theoretical understanding of different principles are lacking. We systematically review state-of-the-art deep learning-based prediction, planning, and integrated prediction and planning models. Different facets of the integration ranging from model architecture and model design to behavioral aspects are considered and related to each other. Moreover, we discuss the implications, strengths, and limitations of different integration methods. By pointing out research gaps, describing relevant future challenges, and highlighting trends in the research field, we identify promising directions for future research.