 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Through Retrospection: Improving Trajectory Prediction for Automated Driving with Error Feedback
Apr 18, 2025
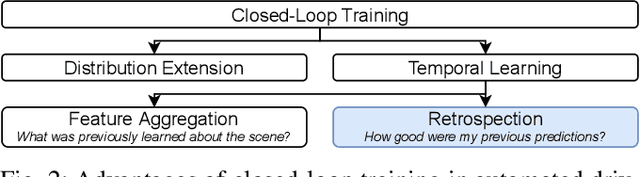

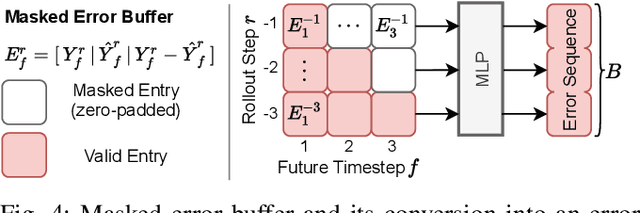
In automated driving, predicting trajectories of surrounding vehicles supports reasoning about scene dynamics and enables safe planning for the ego vehicle. However, existing models handle predictions as an instantaneous task of forecasting future trajectories based on observed information. As time proceeds, the next prediction is made independently of the previous one, which means that the model cannot correct its errors during inference and will repeat them. To alleviate this problem and better leverage temporal data, we propose a novel retrospection technique. Through training on closed-loop rollouts the model learns to use aggregated feedback. Given new observations it reflects on previous predictions and analyzes its errors to improve the quality of subsequent predictions. Thus, the model can learn to correct systematic errors during inference. Comprehensive experiments on nuScenes and Argoverse demonstrate a considerable decrease in minimum Average Displacement Error of up to 31.9% compared to the state-of-the-art baseline without retrospection. We further showcase the robustness of our technique by demonstrating a better handling of out-of-distribution scenarios with undetected road-users.
Pioneering SE(2)-Equivariant Trajectory Planning for Automated Driving
Mar 17, 2024Planning the trajectory of the controlled ego vehicle is a key challenge in automated driving. As for human drivers, predicting the motions of surrounding vehicles is important to plan the own actions. Recent motion prediction methods utilize equivariant neural networks to exploit geometric symmetries in the scene. However, no existing method combines motion prediction and trajectory planning in a joint step while guaranteeing equivariance under roto-translations of the input space. We address this gap by proposing a lightweight equivariant planning model that generates multi-modal joint predictions for all vehicles and selects one mode as the ego plan. The equivariant network design improves sample efficiency, guarantees output stability, and reduces model parameters. We further propose equivariant route attraction to guide the ego vehicle along a high-level route provided by an off-the-shelf GPS navigation system. This module creates a momentum from embedded vehicle positions toward the route in latent space while keeping the equivariance property. Route attraction enables goal-oriented behavior without forcing the vehicle to stick to the exact route. We conduct experiments on the challenging nuScenes dataset to investigate the capability of our planner. The results show that the planned trajectory is stable under roto-translations of the input scene which demonstrates the equivariance of our model. Despite using only a small split of the dataset for training, our method improves L2 distance at 3 s by 20.6 % and surpasses the state of the art.
Rethinking Integration of Prediction and Planning in Deep Learning-Based Automated Driving Systems: A Review
Aug 10, 2023
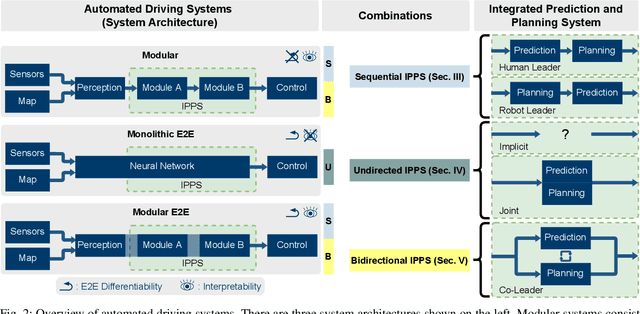
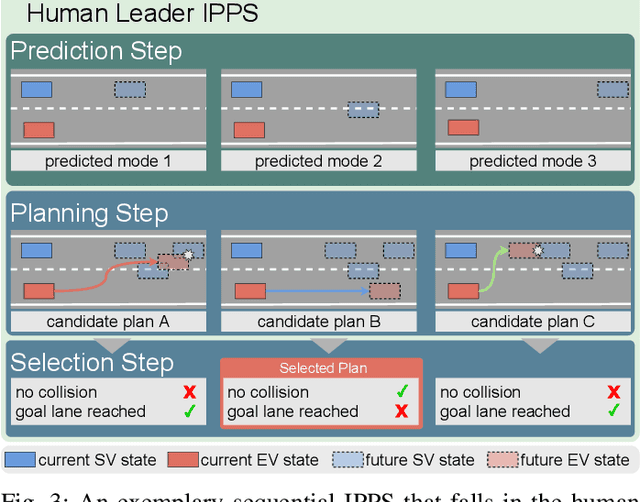
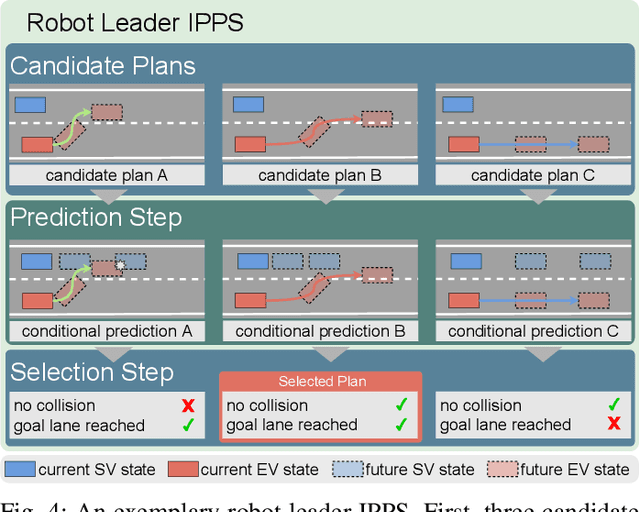
Automated driving has the potential to revolutionize personal, public, and freight mobility. Besides the enormous challenge of perception, i.e. accurately perceiving the environment using available sensor data, automated driving comprises planning a safe, comfortable, and efficient motion trajectory. To promote safety and progress, many works rely on modules that predict the future motion of surrounding traffic. Modular automated driving systems commonly handle prediction and planning as sequential separate tasks. While this accounts for the influence of surrounding traffic on the ego-vehicle, it fails to anticipate the reactions of traffic participants to the ego-vehicle's behavior. Recent works suggest that integrating prediction and planning in an interdependent joint step is necessary to achieve safe, efficient, and comfortable driving. While various models implement such integrated systems, a comprehensive overview and theoretical understanding of different principles are lacking. We systematically review state-of-the-art deep learning-based prediction, planning, and integrated prediction and planning models. Different facets of the integration ranging from model architecture and model design to behavioral aspects are considered and related to each other. Moreover, we discuss the implications, strengths, and limitations of different integration methods. By pointing out research gaps, describing relevant future challenges, and highlighting trends in the research field, we identify promising directions for future research.