 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Through Retrospection: Improving Trajectory Prediction for Automated Driving with Error Feedback
Apr 18, 2025
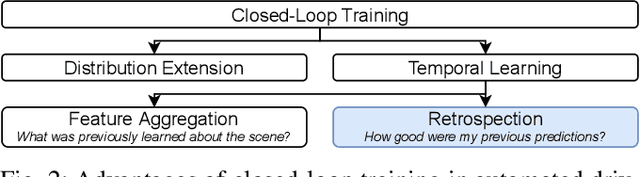

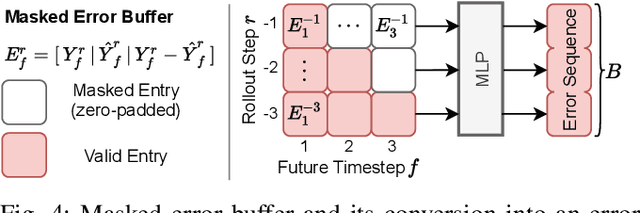
In automated driving, predicting trajectories of surrounding vehicles supports reasoning about scene dynamics and enables safe planning for the ego vehicle. However, existing models handle predictions as an instantaneous task of forecasting future trajectories based on observed information. As time proceeds, the next prediction is made independently of the previous one, which means that the model cannot correct its errors during inference and will repeat them. To alleviate this problem and better leverage temporal data, we propose a novel retrospection technique. Through training on closed-loop rollouts the model learns to use aggregated feedback. Given new observations it reflects on previous predictions and analyzes its errors to improve the quality of subsequent predictions. Thus, the model can learn to correct systematic errors during inference. Comprehensive experiments on nuScenes and Argoverse demonstrate a considerable decrease in minimum Average Displacement Error of up to 31.9% compared to the state-of-the-art baseline without retrospection. We further showcase the robustness of our technique by demonstrating a better handling of out-of-distribution scenarios with undetected road-users.
Entropy-Based Uncertainty Modeling for Trajectory Prediction in Autonomous Driving
Oct 02, 2024



In autonomous driving, accurate motion prediction is essential for safe and efficient motion planning. To ensure safety, planners must rely on reliable uncertainty information about the predicted future behavior of surrounding agents, yet this aspect has received limited attention. This paper addresses the so-far neglected problem of uncertainty modeling in trajectory prediction. We adopt a holistic approach that focuses on uncertainty quantification, decomposition, and the influence of model composition. Our method is based on a theoretically grounded information-theoretic approach to measure uncertainty, allowing us to decompose total uncertainty into its aleatoric and epistemic components. We conduct extensive experiments on the nuScenes dataset to assess how different model architectures and configurations affect uncertainty quantification and model robustness.
Motion Forecasting via Model-Based Risk Minimization
Sep 16, 2024Forecasting the future trajectories of surrounding agents is crucial for autonomous vehicles to ensure safe, efficient, and comfortable route planning. While model ensembling has improved prediction accuracy in various fields, its application in trajectory prediction is limited due to the multi-modal nature of predictions. In this paper, we propose a novel sampling method applicable to trajectory prediction based on the predictions of multiple models. We first show that conventional sampling based on predicted probabilities can degrade performance due to missing alignment between models. To address this problem, we introduce a new method that generates optimal trajectories from a set of neural networks, framing it as a risk minimization problem with a variable loss function. By using state-of-the-art models as base learners, our approach constructs diverse and effective ensembles for optimal trajectory sampling. Extensive experiments on the nuScenes prediction dataset demonstrate that our method surpasses current state-of-the-art techniques, achieving top ranks on the leaderboard. We also provide a comprehensive empirical study on ensembling strategies, offering insights into their effectiveness. Our findings highlight the potential of advanced ensembling techniques in trajectory prediction, significantly improving predictive performance and paving the way for more reliable predicted trajectories.