 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEntropy-Based Uncertainty Modeling for Trajectory Prediction in Autonomous Driving
Oct 02, 2024



In autonomous driving, accurate motion prediction is essential for safe and efficient motion planning. To ensure safety, planners must rely on reliable uncertainty information about the predicted future behavior of surrounding agents, yet this aspect has received limited attention. This paper addresses the so-far neglected problem of uncertainty modeling in trajectory prediction. We adopt a holistic approach that focuses on uncertainty quantification, decomposition, and the influence of model composition. Our method is based on a theoretically grounded information-theoretic approach to measure uncertainty, allowing us to decompose total uncertainty into its aleatoric and epistemic components. We conduct extensive experiments on the nuScenes dataset to assess how different model architectures and configurations affect uncertainty quantification and model robustness.
Can you text what is happening? Integrating pre-trained language encoders into trajectory prediction models for autonomous driving
Sep 13, 2023In autonomous driving tasks, scene understanding is the first step towards predicting the future behavior of the surrounding traffic participants. Yet, how to represent a given scene and extract its features are still open research questions. In this study, we propose a novel text-based representation of traffic scenes and process it with a pre-trained language encoder. First, we show that text-based representations, combined with classical rasterized image representations, lead to descriptive scene embeddings. Second, we benchmark our predictions on the nuScenes dataset and show significant improvements compared to baselines. Third, we show in an ablation study that a joint encoder of text and rasterized images outperforms the individual encoders confirming that both representations have their complementary strengths.
Pedestrian Behavior Prediction for Automated Driving: Requirements, Metrics, and Relevant Features
Dec 15, 2020
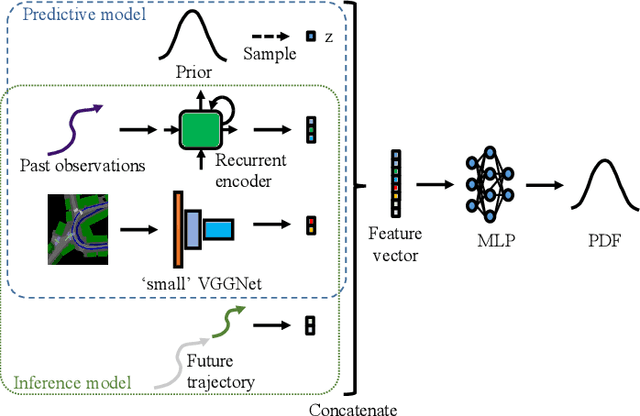
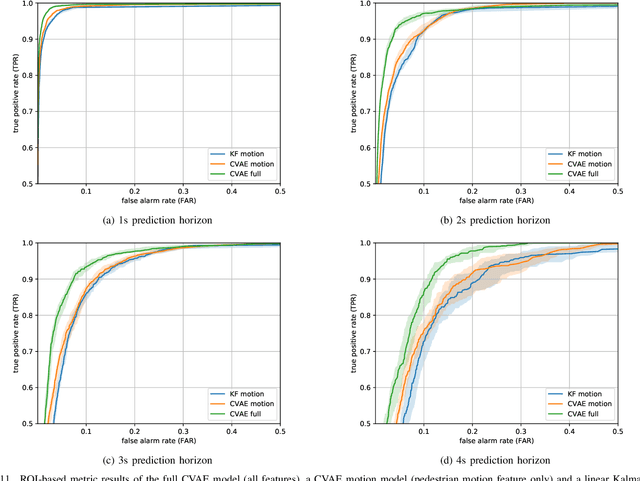
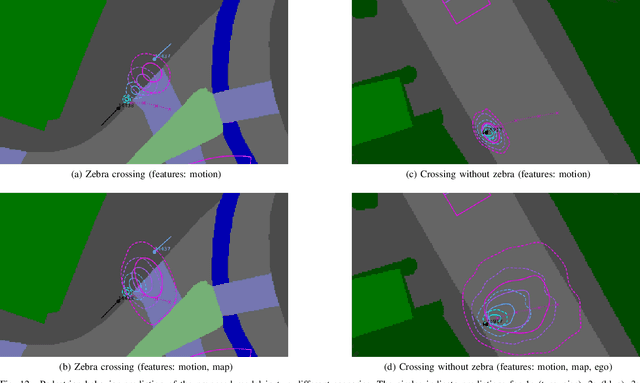
Automated vehicles require a comprehensive understanding of traffic situations to ensure safe and comfortable driving. In this context, the prediction of pedestrians is particularly challenging as pedestrian behavior can be influenced by multiple factors. In this paper, we thoroughly analyze the requirements on pedestrian behavior prediction for automated driving via a system-level approach: to this end we investigate real-world pedestrian-vehicle interactions with human drivers. Based on human driving behavior we then derive appropriate reaction patterns of an automated vehicle. Finally, requirements for the prediction of pedestrians are determined. This also includes a novel metric tailored to measure prediction performance from a system-level perspective. Furthermore, we present a pedestrian prediction model based on a Conditional Variational Auto-Encoder (CVAE) which incorporates multiple contextual cues to achieve accurate long-term prediction. The CVAE shows superior performance over a baseline prediction model, where prediction performance was evaluated on a large-scale data set comprising thousands of real-world pedestrian-vehicle-interactions. Finally, we investigate the impact of different contextual cues on prediction performance via an ablation study whose results can guide future research on the perception of relevant pedestrian attributes.
Interpretable and Fine-Grained Visual Explanations for Convolutional Neural Networks
Aug 07, 2019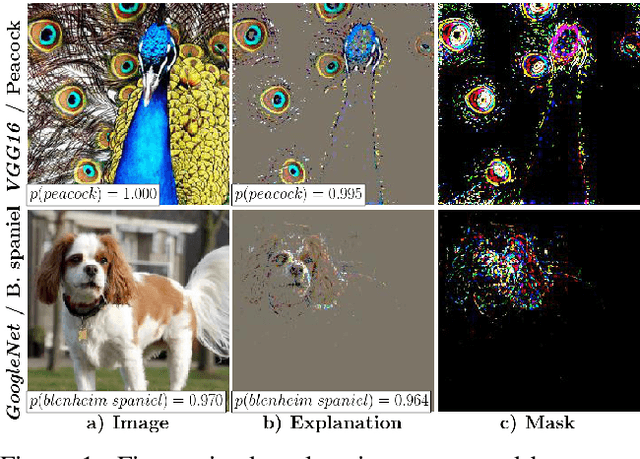
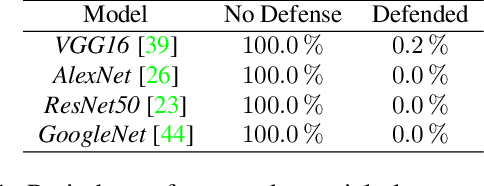
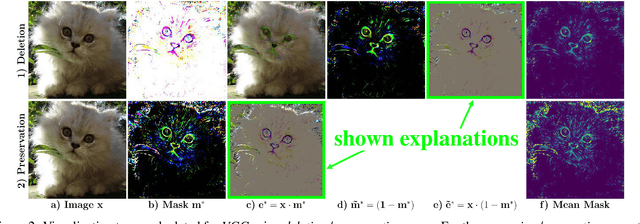
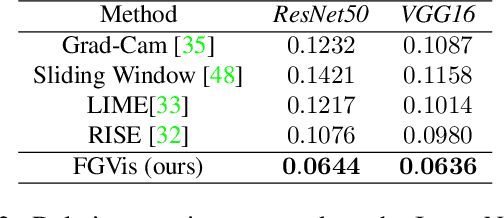
To verify and validate networks, it is essential to gain insight into their decisions, limitations as well as possible shortcomings of training data. In this work, we propose a post-hoc, optimization based visual explanation method, which highlights the evidence in the input image for a specific prediction. Our approach is based on a novel technique to defend against adversarial evidence (i.e. faulty evidence due to artefacts) by filtering gradients during optimization. The defense does not depend on human-tuned parameters. It enables explanations which are both fine-grained and preserve the characteristics of images, such as edges and colors. The explanations are interpretable, suited for visualizing detailed evidence and can be tested as they are valid model inputs. We qualitatively and quantitatively evaluate our approach on a multitude of models and datasets.
Functionally Modular and Interpretable Temporal Filtering for Robust Segmentation
Oct 15, 2018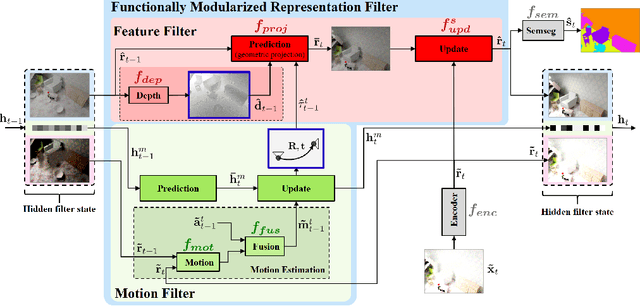
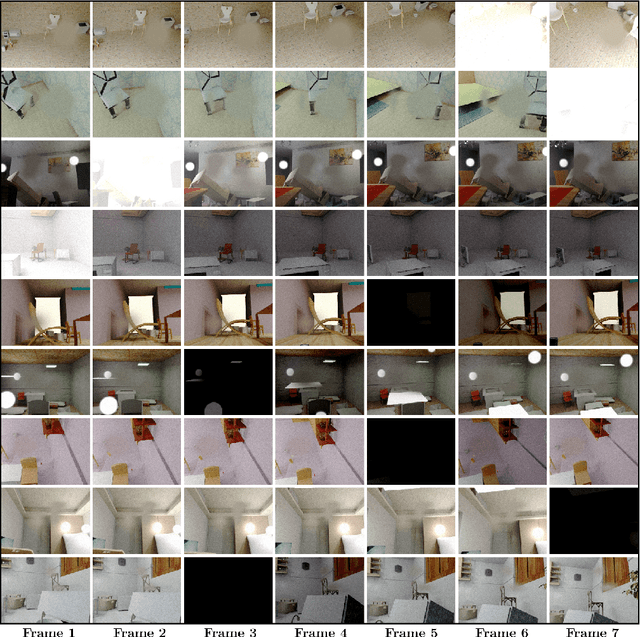

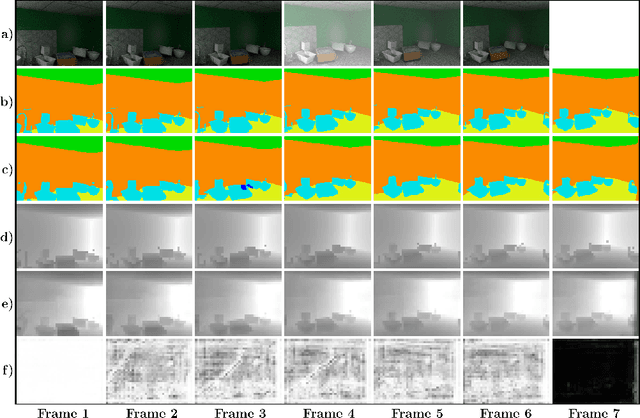
The performance of autonomous systems heavily relies on their ability to generate a robust representation of the environment. Deep neural networks have greatly improved vision-based perception systems but still fail in challenging situations, e.g. sensor outages or heavy weather. These failures are often introduced by data-inherent perturbations, which significantly reduce the information provided to the perception system. We propose a functionally modularized temporal filter, which stabilizes an abstract feature representation of a single-frame segmentation model using information of previous time steps. Our filter module splits the filter task into multiple less complex and more interpretable subtasks. The basic structure of the filter is inspired by a Bayes estimator consisting of a prediction and an update step. To make the prediction more transparent, we implement it using a geometric projection and estimate its parameters. This additionally enables the decomposition of the filter task into static representation filtering and low-dimensional motion filtering. Our model can cope with missing frames and is trainable in an end-to-end fashion. Using photorealistic, synthetic video data, we show the ability of the proposed architecture to overcome data-inherent perturbations. The experiments especially highlight advantages introduced by an interpretable and explicit filter module.
Inverse Reinforcement Learning with Simultaneous Estimation of Rewards and Dynamics
Apr 13, 2016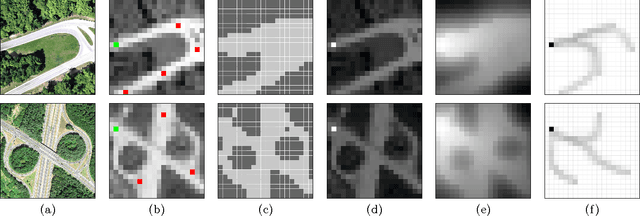
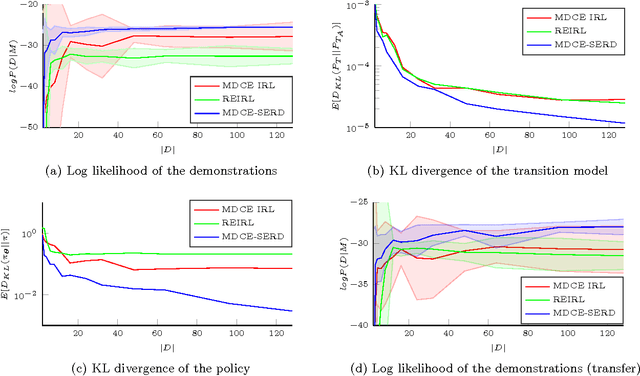
Inverse Reinforcement Learning (IRL) describes the problem of learning an unknown reward function of a Markov Decision Process (MDP) from observed behavior of an agent. Since the agent's behavior originates in its policy and MDP policies depend on both the stochastic system dynamics as well as the reward function, the solution of the inverse problem is significantly influenced by both. Current IRL approaches assume that if the transition model is unknown, additional samples from the system's dynamics are accessible, or the observed behavior provides enough samples of the system's dynamics to solve the inverse problem accurately. These assumptions are often not satisfied. To overcome this, we present a gradient-based IRL approach that simultaneously estimates the system's dynamics. By solving the combined optimization problem, our approach takes into account the bias of the demonstrations, which stems from the generating policy. The evaluation on a synthetic MDP and a transfer learning task shows improvements regarding the sample efficiency as well as the accuracy of the estimated reward functions and transition models.