 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEntropy-Based Uncertainty Modeling for Trajectory Prediction in Autonomous Driving
Oct 02, 2024



In autonomous driving, accurate motion prediction is essential for safe and efficient motion planning. To ensure safety, planners must rely on reliable uncertainty information about the predicted future behavior of surrounding agents, yet this aspect has received limited attention. This paper addresses the so-far neglected problem of uncertainty modeling in trajectory prediction. We adopt a holistic approach that focuses on uncertainty quantification, decomposition, and the influence of model composition. Our method is based on a theoretically grounded information-theoretic approach to measure uncertainty, allowing us to decompose total uncertainty into its aleatoric and epistemic components. We conduct extensive experiments on the nuScenes dataset to assess how different model architectures and configurations affect uncertainty quantification and model robustness.
Motion Forecasting via Model-Based Risk Minimization
Sep 16, 2024Forecasting the future trajectories of surrounding agents is crucial for autonomous vehicles to ensure safe, efficient, and comfortable route planning. While model ensembling has improved prediction accuracy in various fields, its application in trajectory prediction is limited due to the multi-modal nature of predictions. In this paper, we propose a novel sampling method applicable to trajectory prediction based on the predictions of multiple models. We first show that conventional sampling based on predicted probabilities can degrade performance due to missing alignment between models. To address this problem, we introduce a new method that generates optimal trajectories from a set of neural networks, framing it as a risk minimization problem with a variable loss function. By using state-of-the-art models as base learners, our approach constructs diverse and effective ensembles for optimal trajectory sampling. Extensive experiments on the nuScenes prediction dataset demonstrate that our method surpasses current state-of-the-art techniques, achieving top ranks on the leaderboard. We also provide a comprehensive empirical study on ensembling strategies, offering insights into their effectiveness. Our findings highlight the potential of advanced ensembling techniques in trajectory prediction, significantly improving predictive performance and paving the way for more reliable predicted trajectories.
Conditional Unscented Autoencoders for Trajectory Prediction
Oct 30, 2023



The \ac{CVAE} is one of the most widely-used models in trajectory prediction for \ac{AD}. It captures the interplay between a driving context and its ground-truth future into a probabilistic latent space and uses it to produce predictions. In this paper, we challenge key components of the CVAE. We leverage recent advances in the space of the VAE, the foundation of the CVAE, which show that a simple change in the sampling procedure can greatly benefit performance. We find that unscented sampling, which draws samples from any learned distribution in a deterministic manner, can naturally be better suited to trajectory prediction than potentially dangerous random sampling. We go further and offer additional improvements, including a more structured mixture latent space, as well as a novel, potentially more expressive way to do inference with CVAEs. We show wide applicability of our models by evaluating them on the INTERACTION prediction dataset, outperforming the state of the art, as well as at the task of image modeling on the CelebA dataset, outperforming the baseline vanilla CVAE. Code is available at https://github.com/boschresearch/cuae-prediction.
Unscented Autoencoder
Jun 08, 2023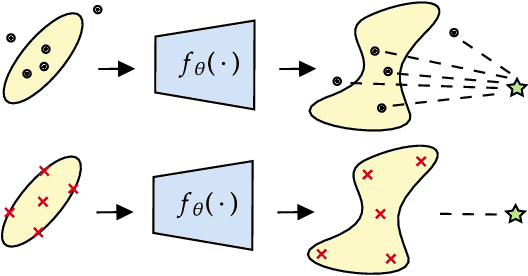
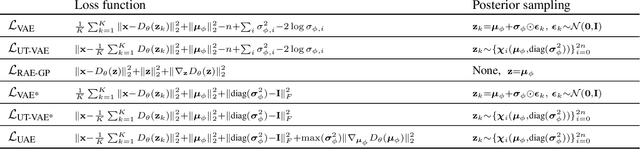


The Variational Autoencoder (VAE) is a seminal approach in deep generative modeling with latent variables. Interpreting its reconstruction process as a nonlinear transformation of samples from the latent posterior distribution, we apply the Unscented Transform (UT) -- a well-known distribution approximation used in the Unscented Kalman Filter (UKF) from the field of filtering. A finite set of statistics called sigma points, sampled deterministically, provides a more informative and lower-variance posterior representation than the ubiquitous noise-scaling of the reparameterization trick, while ensuring higher-quality reconstruction. We further boost the performance by replacing the Kullback-Leibler (KL) divergence with the Wasserstein distribution metric that allows for a sharper posterior. Inspired by the two components, we derive a novel, deterministic-sampling flavor of the VAE, the Unscented Autoencoder (UAE), trained purely with regularization-like terms on the per-sample posterior. We empirically show competitive performance in Fr\'echet Inception Distance (FID) scores over closely-related models, in addition to a lower training variance than the VAE.
Bridging the Gap Between Multi-Step and One-Shot Trajectory Prediction via Self-Supervision
Jun 06, 2023



Accurate vehicle trajectory prediction is an unsolved problem in autonomous driving with various open research questions. State-of-the-art approaches regress trajectories either in a one-shot or step-wise manner. Although one-shot approaches are usually preferred for their simplicity, they relinquish powerful self-supervision schemes that can be constructed by chaining multiple time-steps. We address this issue by proposing a middle-ground where multiple trajectory segments are chained together. Our proposed Multi-Branch Self-Supervised Predictor receives additional training on new predictions starting at intermediate future segments. In addition, the model 'imagines' the latent context and 'predicts the past' while combining multi-modal trajectories in a tree-like manner. We deliberately keep aspects such as interaction and environment modeling simplistic and nevertheless achieve competitive results on the INTERACTION dataset. Furthermore, we investigate the sparsely explored uncertainty estimation of deterministic predictors. We find positive correlations between the prediction error and two proposed metrics, which might pave way for determining prediction confidence.
StarNet: Joint Action-Space Prediction with Star Graphs and Implicit Global Frame Self-Attention
Nov 26, 2021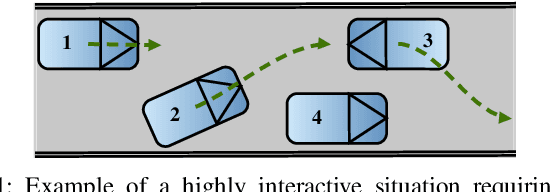
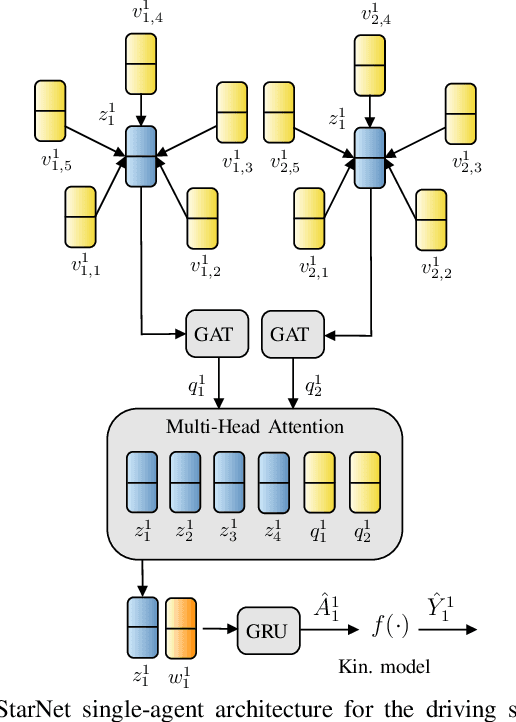
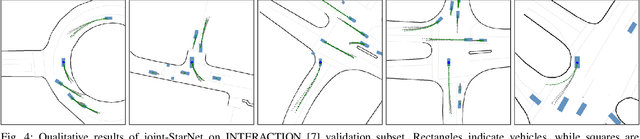
In this work, we present a novel multi-modal multi-agent trajectory prediction architecture, focusing on map and interaction modeling using graph representation. For the purposes of map modeling, we capture rich topological structure into vector-based star graphs, which enable an agent to directly attend to relevant regions along polylines that are used to represent the map. We denote this architecture StarNet, and integrate it in a single-agent prediction setting. As the main result, we extend this architecture to joint scene-level prediction, which produces multiple agents' predictions simultaneously. The key idea in joint-StarNet is integrating the awareness of one agent in its own reference frame with how it is perceived from the points of view of other agents. We achieve this via masked self-attention. Both proposed architectures are built on top of the action-space prediction framework introduced in our previous work, which ensures kinematically feasible trajectory predictions. We evaluate the methods on the interaction-rich inD and INTERACTION datasets, with both StarNet and joint-StarNet achieving improvements over state of the art.
Self-Supervised Action-Space Prediction for Automated Driving
Sep 21, 2021
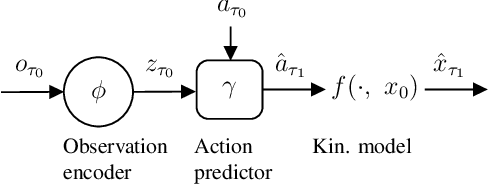
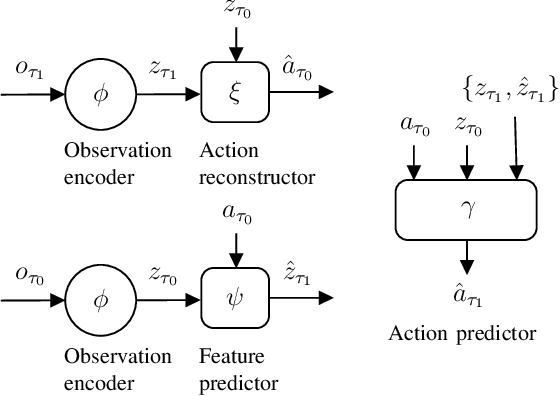
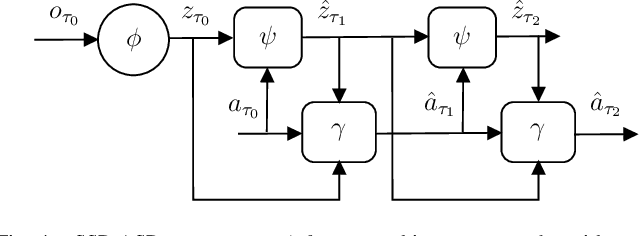
Making informed driving decisions requires reliable prediction of other vehicles' trajectories. In this paper, we present a novel learned multi-modal trajectory prediction architecture for automated driving. It achieves kinematically feasible predictions by casting the learning problem into the space of accelerations and steering angles -- by performing action-space prediction, we can leverage valuable model knowledge. Additionally, the dimensionality of the action manifold is lower than that of the state manifold, whose intrinsically correlated states are more difficult to capture in a learned manner. For the purpose of action-space prediction, we present the simple Feed-Forward Action-Space Prediction (FFW-ASP) architecture. Then, we build on this notion and introduce the novel Self-Supervised Action-Space Prediction (SSP-ASP) architecture that outputs future environment context features in addition to trajectories. A key element in the self-supervised architecture is that, based on an observed action history and past context features, future context features are predicted prior to future trajectories. The proposed methods are evaluated on real-world datasets containing urban intersections and roundabouts, and show accurate predictions, outperforming state-of-the-art for kinematically feasible predictions in several prediction metrics.