 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling Planning for Automated Driving using Simplistic Synthetic Data
May 30, 2023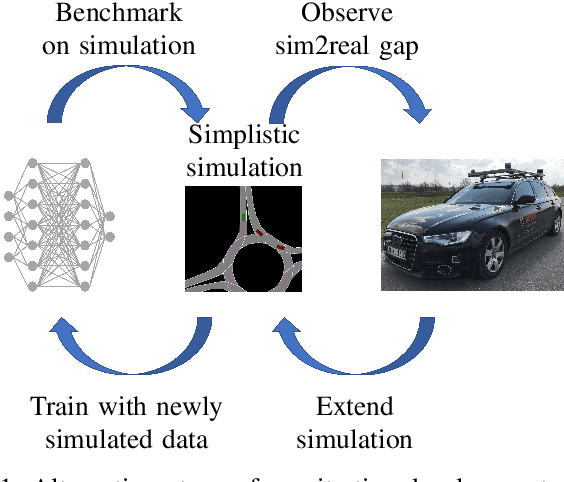
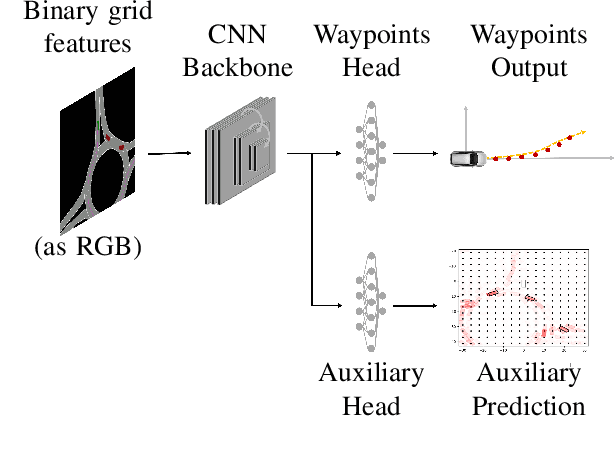


We challenge the perceived consensus that the application of deep learning to solve the automated driving planning task requires a huge amount of real-world data or a realistic simulator. Using a roundabout scenario, we show that this requirement can be relaxed in favour of targeted, simplistic simulated data. A benefit is that such data can be easily generated for critical scenarios that are typically underrepresented in realistic datasets. By applying vanilla behavioural cloning almost exclusively to lightweight simulated data, we achieve reliable and comfortable real-world driving. Our key insight lies in an incremental development approach that includes regular in-vehicle testing to identify sim-to-real gaps, targeted data augmentation, and training scenario variations. In addition to the methodology, we offer practical guidelines for deploying such a policy within a real-world vehicle, along with insights of the resulting qualitative driving behaviour. This approach serves as a blueprint for many automated driving use cases, providing valuable insights for future research and helping develop efficient and effective solutions.
Pedestrian Behavior Prediction for Automated Driving: Requirements, Metrics, and Relevant Features
Dec 15, 2020
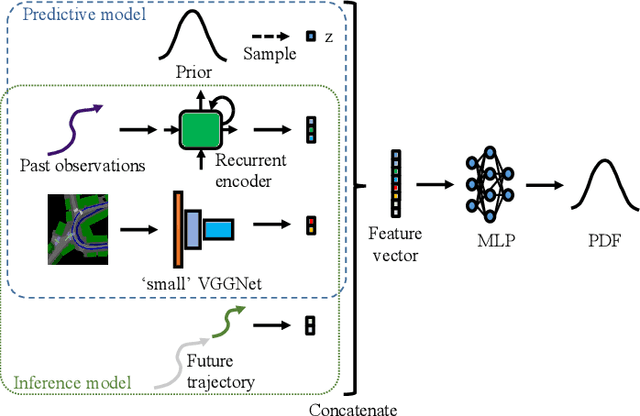
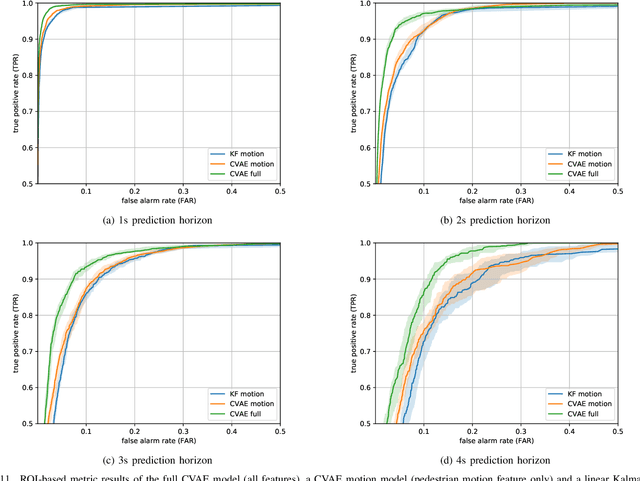
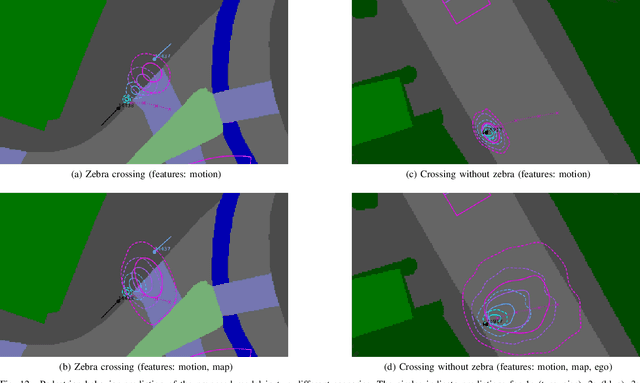
Automated vehicles require a comprehensive understanding of traffic situations to ensure safe and comfortable driving. In this context, the prediction of pedestrians is particularly challenging as pedestrian behavior can be influenced by multiple factors. In this paper, we thoroughly analyze the requirements on pedestrian behavior prediction for automated driving via a system-level approach: to this end we investigate real-world pedestrian-vehicle interactions with human drivers. Based on human driving behavior we then derive appropriate reaction patterns of an automated vehicle. Finally, requirements for the prediction of pedestrians are determined. This also includes a novel metric tailored to measure prediction performance from a system-level perspective. Furthermore, we present a pedestrian prediction model based on a Conditional Variational Auto-Encoder (CVAE) which incorporates multiple contextual cues to achieve accurate long-term prediction. The CVAE shows superior performance over a baseline prediction model, where prediction performance was evaluated on a large-scale data set comprising thousands of real-world pedestrian-vehicle-interactions. Finally, we investigate the impact of different contextual cues on prediction performance via an ablation study whose results can guide future research on the perception of relevant pedestrian attributes.